

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФГБОУ ВПО «Кубанский государственный технологический университет»
Армавирский механико-технологический институт
Кафедра внутризаводского электрооборудования и автоматики
ОТЧЕТ
о лабораторной работе №5 по дисциплине «Элементы автоматики и микропроцессорные устройства»
Изучение и программирование микропроцессорного
контроллера МКП-1.
Выполнил:
Студент группы_____________________
Фамилия И.О.______________________
Дата, роспись_______________________
Принял (оценка):____________________
Преподаватель Хлонь Е.П.
Дата, роспись________________________
Армавир – 2012
Цель работы: Изучение структурной схемы, конструкции и технических характеристик микропроцессорного контроллера МКП-1 и получение навыков его программирования.
Содержание работы:
1 Изучение структурной схемы, конструкции и технических характеристик МКП-1.
2 Изучение режимов работы и методов диагностики неисправностей МКП-1.
3 Составление, ввод и отладка управляющей программы для промышленного робота ПР-5-2.
Перечень оборудования:
1. Микропроцессорный программируемый контроллер МКП-1.
2 Промышленный робот ПР-5-2.
Описание лабораторной установки
Программируемый микроконтроллер предназначен для циклового двух позиционного управления манипуляторами и технологическим оборудованием.
В состав структурной схемы МКП-1 входят следующие модули (рисунок 1):
-
Модуль процессора МПР — предназначен для обработки информации и формировании управляющих сигналов в соответствии с программой.
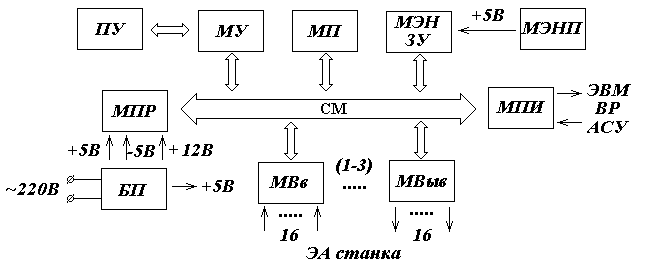
Рисунок 1 – Структурная схема МКП-1
-
Пульт управления ПУ — предназначен для задания режимов работы МКП-1, ввода и редактирования управляющей программы, ручного управления технологическим оборудованием и отображением информации, контролируемой оператором.
-
Модуль памяти МП — предназначен для хранения системных, тестовых и функциональных программ и текущих данных, он содержит постоянное запоминающее устройство ПЗУ и оперативное запоминающее устройство ОЗУ.
-
Модуль энергонезависимого запоминающего устройства МЭНЗУ предназначен для длительного хранения управляющих программ МКП-1 при питании от батарей.
-
Модуль энергонезависимого питания МЭНП, предназначен для обеспечения питанием 5В МЭНЗУ при отключенной сети в течении 6 месяцев от 3х элементов А316.
-
Модуль ввода МВВ, предназначен для преобразования дискретных сигналов от датчиков и реле технологического оборудования в двоичный код микропроцессора.
-
Модуль вывода МВыв, осуществляет преобразование двоичного кода данных от микропроцессора в дискретные управляющие сигналы для электромагнитных реле и клапанов технологического оборудования.
-
Модуль последовательного интерфейса МПИ, предназначен для обмена информацией между контролером и ЭВМ верхнего ранга АСУ ТП. МПИ преобразует параллельный код данных в последовательный при выводе, и выполняет обратное преобразование при вводе данных.
-
Блок питания БП, предназначен для преобразования напряжения сети 220В частотой 50Гц в постоянное стабилизированное напряжение ±5В и –12В для питания модулей МКП-1.
Все модули для обмена информацией подключены к системной магистрали СМ состоящие из шин управления, адреса и данных. Одновременно происходит обмен данных между двумя модулями.
Технические характеристики МКП-1:
-
Тип микропроцессора — К580ВМ80А (разрядность — 8, быстродействие 500000 оп/с).
-
Объем памяти: ПЗУ —2Кб; ОЗУ — 0,25Кб; МЭНЗУ — 1…2Кб (512…1024 команд).
-
Количество входов и выходов — 16, 32 или 48 (в зависимости от модификации).
-
Время реакции на входной сигнал —4мс.
-
Напряжение входных и выходных дискретных сигналов — 20-30В.
-
Программируемые выдержки времени от 0,1 до 25,5с с дискретностью 0,1с.
Потребляемая мощность — 60ВА, масса — не более 10кг.
Режимы работы МКП-1
-
А — автоматическое управление в соответствии с управляющей программой (включается одновременным нажатием клавиш РО).
-
Р — ручное управление с пульта оператора (включается Р1).
-
Ш — пошаговое выполнение программы (включается Р2 при наладке).
-
ВП — ввод управляющей программы (включается РЗ).
-
ПП — просмотр программы (включается в прямом направлении — Р4, в обратном — Р5).
Промышленный робот ПР5-2 предназначен для выполнения операций сборки и обслуживания оборудования (прессов, штампов, и т.д). Он имеет электропневматический привод с 4 степенями подвижности грузоподъемностью 0,2кг при рабочем давлении 4кг/см2.
Таблица 1 Команды управления промышленным роботом ПР5-2.
|
Код команды |
Назначение |
|
0500 |
Движение вперед |
|
0600 |
Движение назад |
|
0501 |
Движение вверх |
|
0601 |
Движение вниз |
|
0502 |
Движение влево |
|
0602 |
Движение вправо |
|
0503 |
Включение захвата |
|
0603 |
Выключение захвата |
|
0504 |
Включение оборудования |
|
0604 |
Выключение оборудования |
|
07ТТ |
Выдержка времени ТТ 0,1сек в 16-ричном коде |
|
0900 |
Безусловный переход к началу |
Таблица 2- Управляющая программа МКП-1 для управления
промышленным роботом ПР5-2 .
Выдержка времени (согласно номеру по списку группы 17) выбирается равной 0,3+1,7=2 с (20 в шестнадцатеричном коде 14)
|
Адрес команды |
Код команды |
Пояснение |
|
000 |
0502 |
Движение влево |
|
001 |
0714 |
Выдержка 2 с |
|
002 |
0500 |
Движение вперед |
|
003 |
0714 |
Выдержка 2 с |
|
004 |
0503 |
Захват включен |
|
005 |
0714 |
Выдержка 2 с |
|
006 |
0501 |
Движение вверх |
|
007 |
0714 |
Выдержка 2 с |
|
008 |
0602 |
Движение вправо |
|
009 |
0714 |
Выдержка 2 с |
|
00A |
0601 |
Движение вниз |
|
00B |
0714 |
Выдержка 2 с |
|
00C |
0603 |
Захват выключен |
|
00D |
0714 |
Выдержка 2 с |
|
00E |
0600 |
Движение назад |
|
00F |
0714 |
Выдержка 2 с |
|
010 |
0504 |
Включение оборудования |
|
011 |
0714 |
Выдержка 2 с |
|
012 |
0604 |
Выключение оборудования |
|
013 |
0714 |
Выдержка 2 с |
|
014 |
0900 |
Безусловный переход к началу |
Вывод: в ходе лабораторной работы я изучила структурную схему, конструкцию и технические характеристики микропроцессорного контроллера МКП-1 и получила навыки его программирования.