

Санкт Петербургский Государственный Морской Технический Университет
Факультет корабельной энергетики и автоматики
Кафедра автоматики и измерений
Курсовая работа
Моделирование регулятора в одноконтурной системе постоянного тока при помощи пакета Simulink
Студент гр.2590
Полянцев И.К.
Преподаватель
Туркин И.И.____________
Санкт-Петербург
2012
Введение
Двигатели постоянного тока используются в прецизионных приводах, требующих плавного регулирования частоты вращения в широком диапазоне. Свойства двигателя постоянного тока, так же как и генераторов, определяются способом возбуждения и схемой включения обмоток возбуждения. По способу возбуждения можно разделить двигатели постоянного тока на двигатели с электромагнитным и магнитоэлектрическим возбуждением.
Двигатели с электромагнитным возбуждением подразделяются на двигатели с параллельным, последовательным, смешанным и независимым возбуждением.
Электрические машины постоянного тока обратимы, то есть, возможна их работа в качестве двигателей или генераторов.
Например, если в системе управления с использованием генератора в обратной связи отсоединить генератор от первичного двигателя и подвести напряжение к обмоткам якоря и возбуждения, то якорь начнет вращаться и машина будет работать как двигатель постоянного тока, преобразуя электрическую энергию в механическую. Двигатели независимого возбуждения наиболее полно удовлетворяют основным требованиям к исполнительным двигателям самоторможение двигателя при снятии сигнала управления, широкий диапазон регулирования частоты вращения, линейность механических и регулировочных характеристик, устойчивость работы во всем диапазоне вращения, малая мощность управления, высокое быстродействие, малые габариты и масса.
Однако двигатели постоянного тока имеют существенные недостатки, накладывающие ограничение на область их применения малый срок службы щеточного устройства из-за наличия скользящего контакта между щетками и коллектором, скользящий контакт является источником радиопомех.
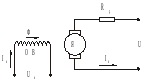
Рис. 1.1. Структурная схема двигателя независимого возбуждения
Подставим в уравнение второго закона
Кирхгофа для якорной цепи
 и
и
 получим
получим
 ,
,
 ,
,
где
 -
якорное сопротивление,
-
якорное сопротивление,
 -
добавочное сопротивление.
-
добавочное сопротивление.
Электродвижущая сила (ЭДС) якоря -
 пропорциональна
угловой скорости -
пропорциональна
угловой скорости -
 ,
связь между ЭДС и угловой скоростью, а
так же между вращающим моментом
,
связь между ЭДС и угловой скоростью, а
так же между вращающим моментом
 и
и
 в системе единиц СИ определяется единым
электромагнитным коэффициентом
в системе единиц СИ определяется единым
электромагнитным коэффициентом
 ,
,
где
 - число пар полюсов двигателя,
- число пар полюсов двигателя,
 - число проводников обмотки якоря,
- число проводников обмотки якоря,
 - число пар параллельных ветвей обмотки
якоря,
- число пар параллельных ветвей обмотки
якоря,
 - магнитный поток.
- магнитный поток.
Причем
 ,
,
где
 - конструктивный коэффициент.
- конструктивный коэффициент.
 ,
,
 ,
,
тогда E якоря
 ,
,
а момент
 ,
,
и напряжение, подаваемое на двигатель
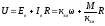 ,
,
откуда
 ,
,
механическая характеристика двигателя постоянного тока записывается в виде
 .
.
Следовательно, механическая характеристика при Ф = const представляет собой прямую линию. Угловую скорость, соответствующую при М = 0 и номинальном напряжении - Uном запишем в виде
 .
.
Эту скорость называют угловой скоростью идеального холостого хода.
Выразим уравнения, которыми описываются электромагнитные и электромеханические процессы в двигателе постоянного тока с независимым возбуждением имеют вид:

 (1.1)
(1.1)


В
уравнениях
 - напряжение, ток и противо ЭДС якоря,
- напряжение, ток и противо ЭДС якоря,
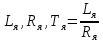 - индуктивность, сопротивление и
электромагнитная постоянная времени
якоря,
- индуктивность, сопротивление и
электромагнитная постоянная времени
якоря,
 -
механическая угловая скорость,
электромагнитный момент, момент нагрузки
и механический угол поворота вала, J
– момент инерции ротора, коэффициенты
-
механическая угловая скорость,
электромагнитный момент, момент нагрузки
и механический угол поворота вала, J
– момент инерции ротора, коэффициенты
 являются конструктивными постоянными.
являются конструктивными постоянными.
Моделирование регулятора в одноконтурной скоростной системе постоянного тока.
Математическое описание и структурные схемы
двигателя постоянного тока
Выразим передаточную функцию скоростной части двигателя постоянного тока(ДПТ) по управляющему и возмущающему воздействиям.
Передаточные функции могут быть представлены следующими выражениями:

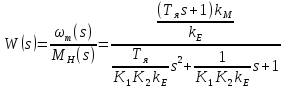
Где
Корни характеристического уравнения определяются выражением

При выполнении
условия
 корни характеристического уравнения
являются вещественными, эквивалентная
передаточная функция ДПТ по управляющему
воздействию может быть представлена в
виде двух последовательно включенных
апериодических звеньев первого порядка
с постоянными времени Т1, Т2 и коэффициентом
передачи 1/kE
корни характеристического уравнения
являются вещественными, эквивалентная
передаточная функция ДПТ по управляющему
воздействию может быть представлена в
виде двух последовательно включенных
апериодических звеньев первого порядка
с постоянными времени Т1, Т2 и коэффициентом
передачи 1/kE
Где Т1=-1/s1,T2=-1/s2.
Для моделирования регулятора в одноконтурной скоростной системе постоянного тока, выберем ДПТ с параметрами:
Рн=0,12 [кВт] – номинальная мощность двигателя
Uя=Uв=110 [В] – номинальное напряжение питания якоря, возбуждения
nн=3000 [об/мин] – номинальная скорость вращения якоря
Iя=1,53 [А] – номинальный ток якоря
Rя=1,48 [Ом] – сопротивление обмотки якоря
Rв=642 [Ом] – сопротивление обмотки возбуждения
J=0.06 [кГм2]
Номинальный момент двигателя, номинальный ток возбуждения, конструктивные постоянные и индуктивность якоря рассчитываются из уравнений:



Где cx=0,3-0,4 – эмпирический коэффициент
Найдем корни характеристического уравнения:




Следовательно постоянные времени T1 и Т2 будут равны


Модель двигателя, построенная в соответствии с уравнениями (1.1) представлена на рис. 2.1, а его динамические характеристики по управлению и по возмущению показаны на рис. 2.2, рис 2.3
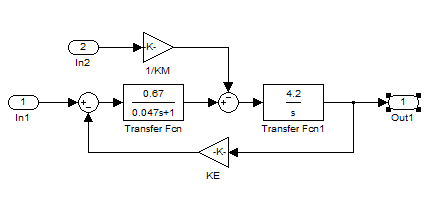
Рис 2.1 Модель двигателя постоянного тока
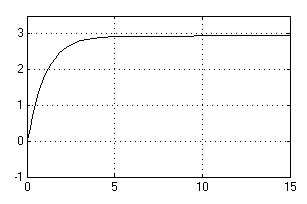
Рис 2.2 Динамические характеристики ДПТ по управлению

Рис 2.3 Динамические характеристики ДПТ по возмущению
Синтез регулятора в одноконтурной системе постоянного тока
Структурная схема системы с исполнительным ДПТ, управляемого по цепи якоря, представлена на рис 2.4. Она включает в себя сам двигатель, представленный последовательно включенными апериодическим звеном первого порядка и интегрирующим звеном, охваченными обратной связью через безинерционное звено.
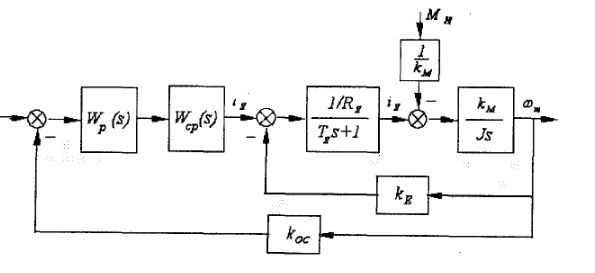
Рис 2.4 структурная схема одноконтурной скоростной системы постоянного тока
В данном случае, постоянные времени сильно разняться Т2>>T1, целесообразно строить ПИ регулятор, который компенсировал бы большую постоянную времени объекта

Тогда передаточная функция разомкнутой системы будет равна:
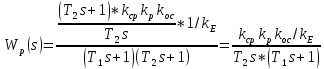
Оптимум по модулю
в такой системе достигается при
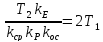 ,
откуда находятся коэффициенты передачи
пропорциональной и интегральной части
регулятора.
,
откуда находятся коэффициенты передачи
пропорциональной и интегральной части
регулятора.

Примем kср=20, kос=0.1, тогда параметры регулятора будут равны kП=1,7, kИ=1,73
Построим модель одноконтурной скоростной системы постоянного тока
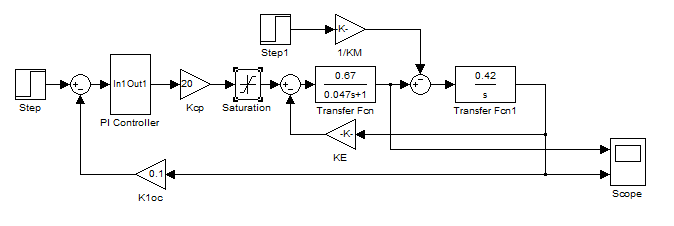
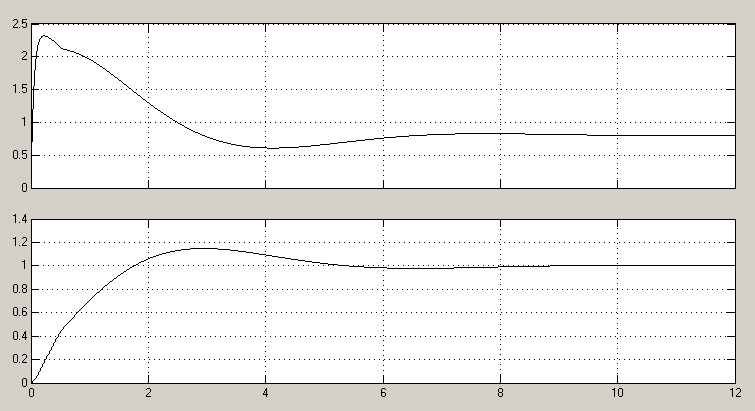
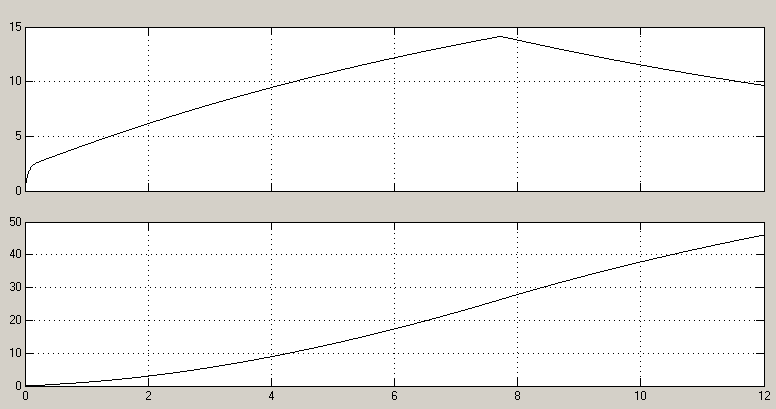
Переходные процессы в замкнутом скоростном контуре по току и скорости при скачке сигнала в момент времени t=0 и скачке возмущающего сигнала в момент времени t=0,5c.
Моделирование дефектов в регуляторе в одноконтурной скоростной системе постоянного тока.
-
Хаотичный входной сигнал (белый шум)
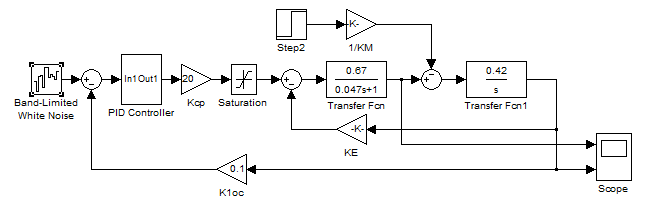
В результате переходные процессы получаются:

-
Хаотичный возмущающий сигнал (белый шум)
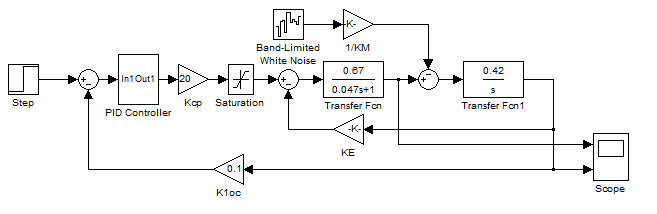
В результате переходные процессы получаются:

-
Выход из строя датчика обратной связи koc=0:
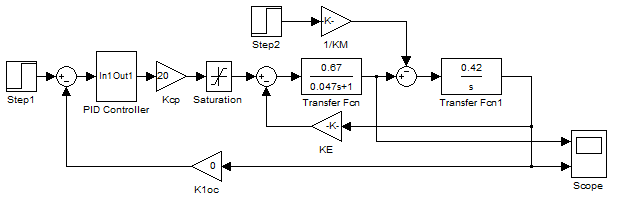
В результате переходные процессы получаются:
Стр.