

Санкт-Петербургский Государственный Политехнический Университет
Факультет Технической Кибернетики
кафедра Компьютерных Систем и Программных Технологий
Отчёт
о лабораторной работе №1
по курсу
Разработка встраиваемых приложений
Выполнил: Васильянов Г.С. 5081/12__________
Проверил: Василев А.Е.__________
Санкт-Петербург
2012 год
-
Синтез одномерных нелинейных передаточных функций
Задание: создать нечеткую модель заданной передаточной функции (ее аналитическое описание и внешний вид - в mcd-файле). Аналогия – нечеткая модель квадратичной зависимости, рассмотренная на лекциях и на стр. 42-43 книги "ВИСУ". Исследовать и обосновать точность реализации. Документировать – как на рис. 2-8 (стр. 43).
Вариант задания – 17
![]()

Рис.1.
-
Выполнение работы
1.1.1 Построение кривой в среде Fuzzy51
Для того, чтобы выполнить ввод кривой в среду Fuzzy51, необходимо разбить нашу кривую на линейные отрезки. В нашем случае разбиение происходит на 4 отрезка (Рис.2).
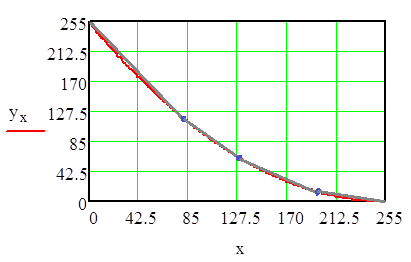
Рис.2. Разбиение кривой на линейные участки
Следующим шагом необходимо ввести данную кривую в среде Fuzzy51 в терминах термов. Введенные нами термы для входных воздействий и выходных управляющих сигналов приведены на Рис. 3.
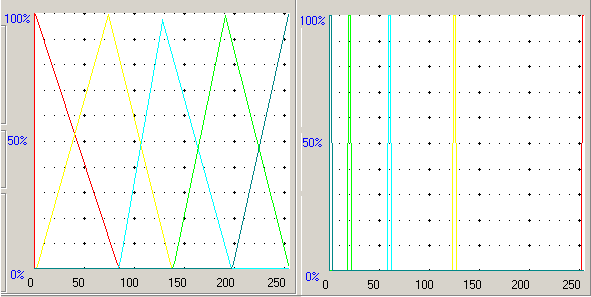
Рис. 3. для входных воздействий и выходных управляющих сигналов
Для описания принципов работы выходных управляющих сигналов от входного воздействия, необходимо составить правила. Для рассматриваемого варианта, они имеют вид, представленный на рис. 4.
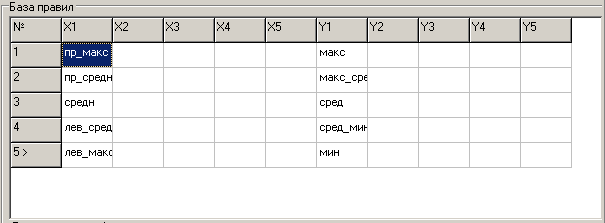
Рис. 4. Правила для описания зависимости выходных управляющих сигналов от входных воздействий.
1.1.2 Получение результатов вычислений
Для того, чтобы получить график нелинейной передаточной функции, введённой нами, необходимо воспользоваться построителем фазовых траекторий на вкладке «Исследования». Результат сравнения приведён на Рис. 5.

Рис. 5. Сравнение заданной траектории (чёрная) с введённой в среде Fuzzy51 (красная).
Исходя из представленного графика, можно сделать вывод, что исходная передаточная функция и передаточная функция, полученная путём моделирования её в среде Fuzzy51 практически совпадают.
-
Выводы
В ходе работы мы произвели синтез одномерной нелинейной функции посредством пакета Fuzzy51 и провели сравнение заданной кривой с полученной. В результате полученных данных можно сказать, что полученная кривая в результате построения в среде Fuzzy51 достаточно точно описывает исходную кривую. Повысить точность можно путём выбора большего числа точек для дефазификации.
-
Создание нечёткого контроллера для управления поведением модели мобильного робота.
Задание: Разработать собственную нечеткую систему управления мобильным роботом, действующим в виртуальной среде с неподвижными и подвижными препятствиями. Аналогия – рассмотренный на лекциях и на стр. 43-46 книги "ВИСУ" упрощенный вариант системы. Исследовать и обосновать реализацию, включая особые ситуации. Документировать – как на рис. 2-12 и 2-13 (стр. 45-46).
-
Ход работы
2.1.1 Построение управляющих термов и правил в среде Fuzzy51
Для построения нечёткого контроллера, необходимо задать входные и выходные термы, из них входные воздействия отвечают за распознавание различных параметров и переменных окружающей робота среды, а выходные – управляют поведением робота.
За основу построения взят пример из учебного пособия «Встраиваемые интеллектуальные системы нечёткого управления», но пример был модифицирован с тем, чтобы улучшить алгоритмы работы поведением робота.
Входные термы:
X1 – угол на цель
Х2 – Расстояние до цели
Х3 – Угол центра препятствия
Х4 – Размер препятствия
Выходные термы:
У1 – Угол поворота
У2 – Скорость движения робота
Термы входных переменных показаны на Рис. 6. Термы выходных переменных – на Рис. 7.
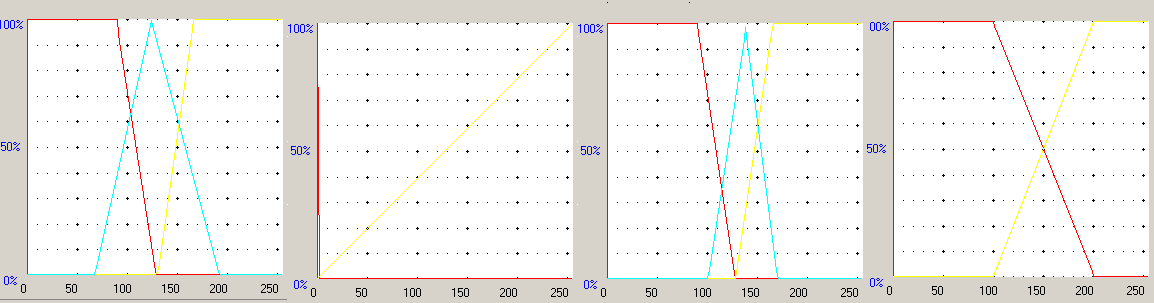
Рис. 6. Входные термы

Рис.7. Выходные термы
Входной терм Х2 (расстояние до цели) выбран таким образом, чтобы полностью остановиться на цели. Для этого было введено всего 2 терма: «Большое» и «Нулевое». Терм «Большое» линейно нарастает, тем самым линейно отражая расстояние до цели. В то же время терм «нулевое» равен 255 в точке 0, что соответствует нулевому расстоянию до цели.
Выходной терм У1(угол поворота) был модифицирован с тем, чтобы чётко разделить направления поворота робота с целью наиболее точного управления направлением движения робота.
Выходной терм У2 (скорость движения робота) был выбран таким образом, чтобы остановиться ровно на цели (терм «нулевая»). В то же время, мы линейно увеличиваем скорость движения (терм «большая») с тем, чтобы робот быстрее шел к цели.
Для описания принципов работы выходных управляющих сигналов от входного воздействия, необходимо составить правила. Составленные правила приведены на рис. 8.
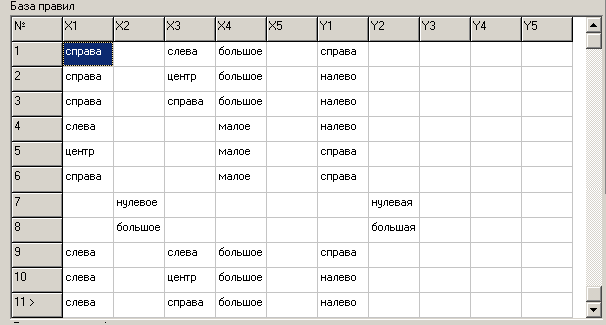
Рис. 8. Правила для описания зависимости выходных управляющих сигналов от входных воздействий.
Правила 1-3 и 9-11выбраны для того, чтобы обеспечить правила обхода препятствия в тех случаях, когда его размеры достаточно велики и определены они для различного положения цели (Х3) относительно робота. Правила поворота робота выбраны одинаковыми, чтобы не вызвать конфликтов управления. При этом обеспечивается задача уклонения от препятствия.
Правила 4-6 выбраны для того, чтобы обеспечить движение робота, когда препятствие малого размера или оставлено позади, при этом мы переходим к задаче наведения на цель.
Правила 7-8 выбраны для того, чтобы управлять скоростью движения робота. При этом, когда робот достаточно близок к цели – он, в соответствии с правилами и термами, останавливается.
2.1.2 Испытания построенной системы
Для того, чтобы проверить корректность построенной системы, необходимо промоделировать её с помощью среды моделирования Virtual Reality.
|
|
|
|
|
|
|
|
|
|
|
|
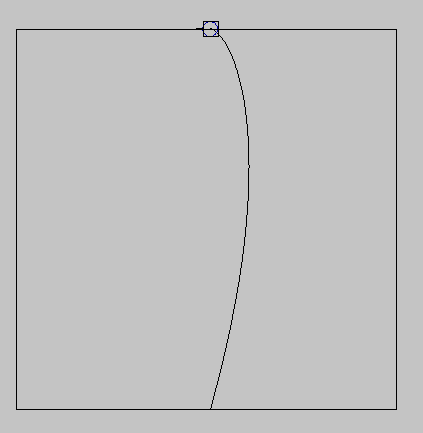
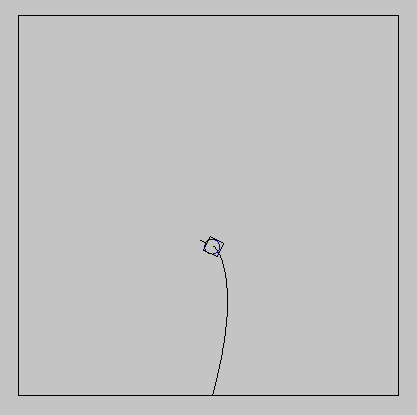
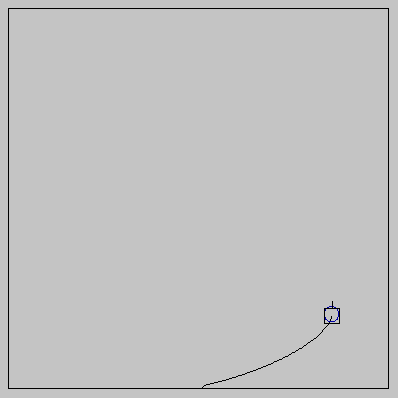
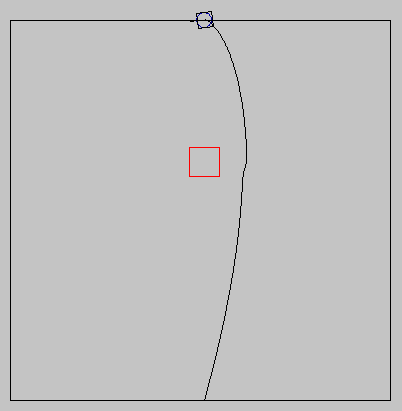
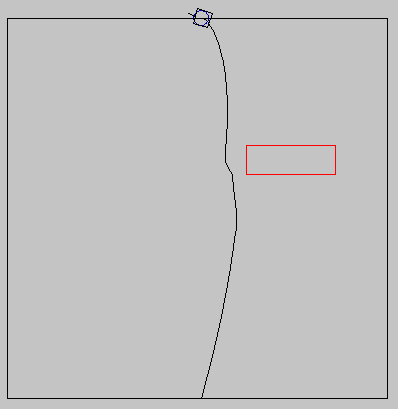
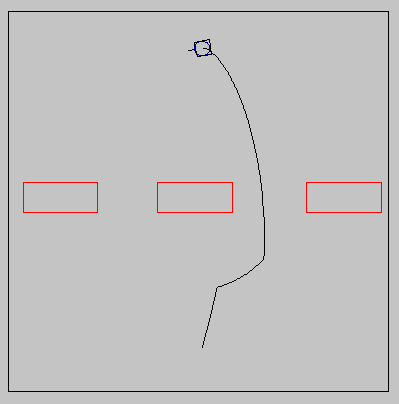
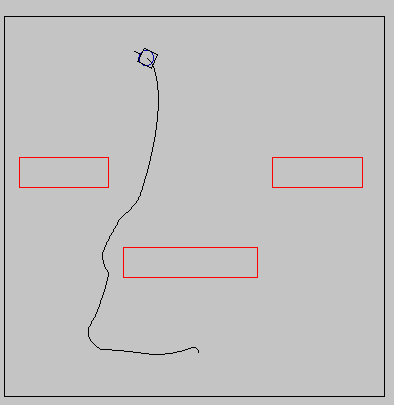
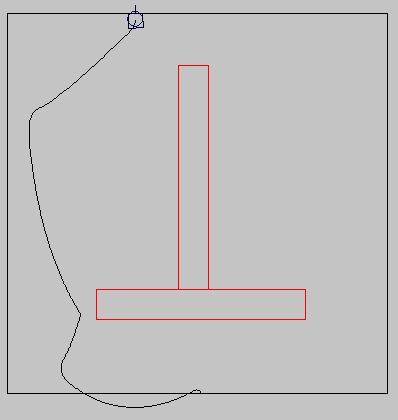
Рис. 9-16. Результаты моделирования в среде Virtual Reality
В результате моделирования можно увидеть, что во всех случаях робот приходит к цели, однако можно заметить некоторые особенности и недочёты. В частности, робот идёт к цели без препятствий по кривой, а не по прямой что связано с тем, что для правила наведения на цель, при условии, что размер препятствия малый, определено правило отклонения вправо.
В последнем случае видно, что робот ушел за пределы карты в самом начале. Можно предположить, что связано это с тем, что у нас определены достаточно «широкие» термы для понятий «угол центра препятствия» и «размеры препятствия».
-
Выводы
В ходе работы нами были изучены принципы построения системы нечёткого управления роботом в среде Virtual Reality. Были построены термы для входных воздействий, построены термы для управляющих роботом сигналов, а так же были сформулированы правила поведения робота. В результате работы было проведено моделирование полученной системы в среде Virtual Reality.