

Федеральное агентство по образованию РФ
Государственное образовательное учреждение
высшего профессионального образования
«Тульский государственный университет»
Кафедра «Системы автоматического управления»
Отчет по лабораторной работе №4
по курсу «Статистическая динамика»
Синтез регулятора автоматической системы сопровождения цели при случайных воздействиях на основе минимаксного критерия
Выполнил: ст. гр. 140181б
Меденцева М.Ю.
Руководитель: доцент, к.т.н.
Воробьев В.В.
Тула 2012
Цель исследования – практическое знакомство с методом синтеза высокоточной линейной системы при стационарных случайных воздействиях.
Достижение поставленной цели связано с необходимостью решения следующих задач:
- построение схемы вычисления предельной на классе сигналов ошибки;
- численная оптимизация параметров регулятора по минимаксному критерию точности (по критерию гарантированной точности);
- анализ устойчивости и качества регулирования системы.
- моделирование функционирования АССЦ при случайных воздействиях.
Функциональная и расчетная схемы вертикального канала ОССЦ даны на рис. 1.
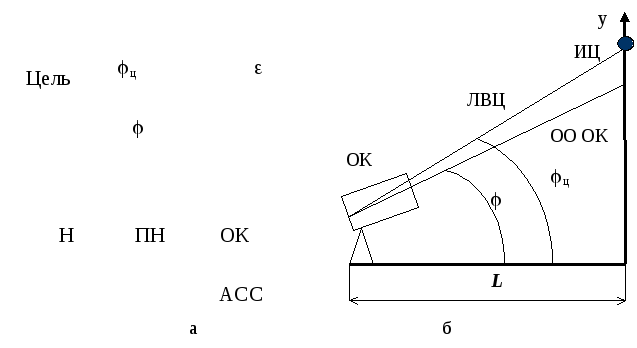
Рис. 1. Функциональная (а) и расчетная (б) схемы ОССЦ: АСС – автоматическая система сопровождения; ОК – оптический координатор; ПН – привод наведения; Н – нагрузка; ЛВЦ – линия визирования цели; ОО – оптическая ось; ИЦ – имитатор цели; φц – угловая координата цели; φ – угол поворота ОО ОК; L – расстояние между ОК и линией движения ИЦ
Рассмотрим ОССЦ с приводом наведения, реализованным на базе электрических машин постоянного тока. Принципиальная схема ОССЦ представлена на рис.1*.
Структурной схеме СС соответствуют следующие основные передаточные функции (ПФ), которые используются для анализа динамики и точности системы:
- ПФ разомкнутой системы
 , (1)
, (1)
где
![]() ;
;
-
главная ПФ замкнутой системы при
![]()
 ; (2)
; (2)
-
ПФ замкнутой СС для ошибки при
![]()
 . (3)
. (3)
Рассмотрим синтез высокоточной линейной АССЦ методом гарантированной точности, который обеспечивает равномерную близость ошибки слежения к нулю на заданном классе входных сигналов.
Максимальная
ошибка по
полезному сигналу
представляет собой гарантированную
точность (ГТ), которая понимается как
максимум модуля ошибки слежения за
реализациями v(t)
из заданного класса
![]() на интервале времени Т:
на интервале времени Т:
![]() .
.
Обозначим
составляющую ГТ по сигналу V(t)
через
![]() .
.
Для вычисления гарантированной точности может использоваться расширенная система, состоящая из последовательно соединённых ЗУ1 и следящей системы. Тогда значение ГТ определяется как
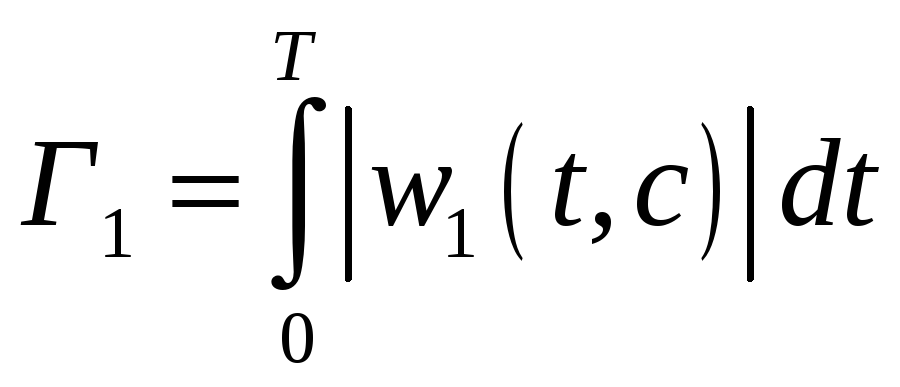 ,
,
где
![]() – импульсная переходная характеристика
расширенной системы от входного сигнала
u1
до сигнала ошибки слежения 1,
с
– вектор параметров регулятора.
– импульсная переходная характеристика
расширенной системы от входного сигнала
u1
до сигнала ошибки слежения 1,
с
– вектор параметров регулятора.
Максимальная ошибка, вызываемая действием помехи, также может быть вычислена методом гарантированной точности, для чего требуется специальным образом сформировать своё задающее устройство (ЗУ2), соответствующее спектральной плотности помехи.
Значение составляющей ГТ по сигналу помехи может быть получено по зависимости:
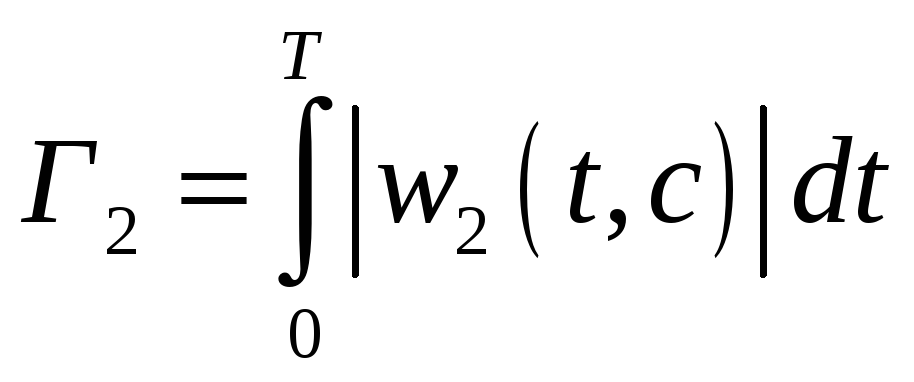 ,
,
где
![]() – импульсная переходная характеристика
расширенной системы от входа задающего
устройства ЗУ2 до сигнала ошибки слежения
2,
также зависящая от параметров регулятора.
– импульсная переходная характеристика
расширенной системы от входа задающего
устройства ЗУ2 до сигнала ошибки слежения
2,
также зависящая от параметров регулятора.
Предельное значение суммарной ошибки АССЦ:
![]() ,
,
которая может возникнуть при одновременном действии полезного сигнала и помехи. Эта величина характеризует точность системы в целом.
Выбор оптимального
вектора параметров
![]() регулятора АССЦ теперь может рассматриваться
как задача минимизации критерия Г,
который имеет ясный содержательный
смысл – наибольшая динамическая ошибка
слежения, которая может возникнуть при
отработке реализаций полезного случайного
сигнала с заданной спектральной
плотностью в условиях действия реализации
случайной помехи с заданным спектром
на интервале времени T:
регулятора АССЦ теперь может рассматриваться
как задача минимизации критерия Г,
который имеет ясный содержательный
смысл – наибольшая динамическая ошибка
слежения, которая может возникнуть при
отработке реализаций полезного случайного
сигнала с заданной спектральной
плотностью в условиях действия реализации
случайной помехи с заданным спектром
на интервале времени T:
![]() .
.
Т аким
образом, поставленная выше задача
оптимальной линейной фильтрации при
описанном подходе включает в себя
следующие этапы:
аким
образом, поставленная выше задача
оптимальной линейной фильтрации при
описанном подходе включает в себя
следующие этапы:
- анализ информации о входных сигналах и формирование ЗУ;
- линеаризация модели объекта управления;
- выбор структуры и/или корректируемых параметров линейного регулятора;
- оптимизация параметров регулятора по критерию минимума ГТ;
- моделирование и оценка показателей точности и динамики синтезированной системы.
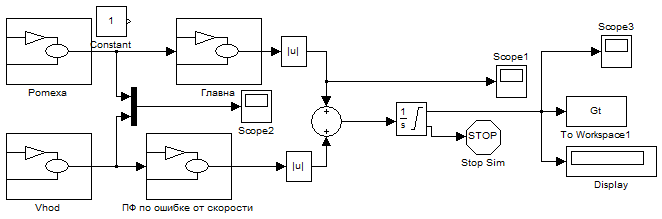
Расчетная Simulink-схема системы:
Получим значение гарантированной точности для нескорректированной системы:
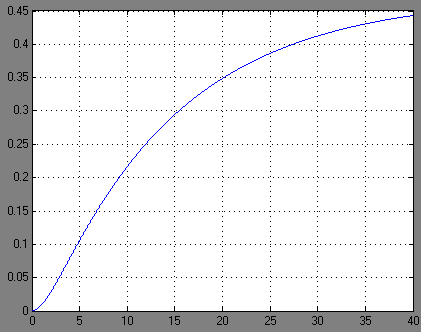
![]()
![]()
![]()
![]()
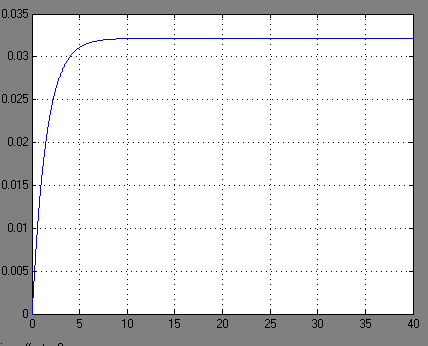
Результаты оптимизации:
![]()
![]()
![]()
![]()
Достигнутое значение ГТ составило 32 мрад, т. е. около 2 град.
Ответы на контрольные вопросы.
1 Какие критерии могут использоваться для оценки точности АССЦ в разных зонах ее работы?
Минимаксный критерий, критерий гарантированной точности.
2 Что такое гарантированная точность следящей системы?
Гарантированная
точности представляет собой предельную
(максимальную) ошибку по полезному
сигналу, которая понимается как максимум
модуля ошибки слежения за реализациями
v(t) из класса
![]() на отрезке времени
на отрезке времени
![]() .
.
3 Какой порядок астатизма имеет АССЦ, и чем определяется ошибка слежения?
АСС является астатической (с астатизмом первого порядка). Это означает, что она инвариантна к уровню входа. В частности, входной ступенчатый сигнал при отсутствии возмущающего момента будет отрабатываться системой с нулевой установившейся ошибкой. Ошибка слежения АСС определяется входной скоростью и производными входа более высоких порядков.
4 Что такое типовой случайный входной сигнал следящей системы? Является ли он стационарным? Какова его спектральная плотность?
Типовой случайный входной сигнал следящей системы имеет постоянные математическое ожидание и дисперсию.. Является стационарным, центрированный, спектральная плотность задана информацией о них.
5 Как моделируются случайные воздействия в схеме расчета ГТ?
В данной работе применен способ моделирования импульсного входного воздействия (дельта-функции) путем задания единичного начального условия на первых интеграторах соответствующих подсистем .
Воздействие дельта-функции на каждое ЗУ можно воспроизводить путем соответствующего задания начальных условий на первом интеграторе его схемы моделирования.
6 В чем состоит математическая постановка задачи оптимизации АССЦ?
Оптимизация регулятора по критерию минимума ГТ.
7 Какие численные методы и стандартные процедуры использовались для оптимизации?
Выбор оптимального
вектора
![]() рассматриваться как задача минимизации
критерия Г.
рассматриваться как задача минимизации
критерия Г.
8 Какие показатели динамики АССЦ контролируются при синтезе?
При наибольших угловых скоростях и ускорениях линии визирования цели, необходимо контролировать при синтезе диапазон мгновенных значений ошибки.
9 Какой принцип положен в основу расчёта суммарной ошибки?
Суммарной ошибки ОССЦ возникнуает при одновременном действии полезного сигнала и помехи. Эта величина характеризует точность системы в целом.