Министерство образования и науки РФ
ФБГБОУ ВПО
«Ижевский государственный технический университет имени М.Т.Калашникова»
Кафедра «Мехатронные системы»
Лабораторная работа
Дисциплина: «Основы мехатроники»
Тема: «Расчет захватного устройства для промышленного робота»
Выполнил:
студент гр. 5-35-1
Рудин Р.А.
Проверил:
д.т.н., профессор
Щенятский А. В.
Ижевск 2012 Техническое задание
Разработать захватное устройство (ЗУ). Объект манипулирования – ступенчатый вал (схема представлена на рисунке 1). Тип захватного устройства – ЗУ с рычажно-ползунным передаточным механизмом (кинематическая схема ЗУ представлена на рисунке 2). Вид движения рабочего элемента – плоскопараллельное.

Рисунок 1 – Схема детали

Рисунок 2 – Кинематическая схема захватного устройства
Введение
Промышленный робот (ПР) – автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления для выполнения двигательных и управляющих функций.
Захватное устройство (ЗУ) промышленных роботов служит для захватывания и удержания в определенном положении объектов манипулирования. Эти объекты могут иметь различные размеры, форму, массу и обладать разнообразными физическими свойствами, поэтому ЗУ относят к числу сменных элементов ПР. Как правило, ПР комплектуют набором типовых (для данной модели) ЗУ, которые можно менять в зависимости от требований конкретного рабочего задания. Иногда на типовой захват устанавливают сменные рабочие элементы (губки, присоски и т.п.). К ЗУ предъявляются требования общего характера и специальные, связанные с конкретными условиями работы. К числу обязательных требований относятся:
-
Надежность захватывания и удержания объекта манипулирования при условии соблюдения необходимых скоростных характеристик манипуляционного механизма. Надежное удержание детали во время разгона и торможения;
-
Стабильность базирования; недопустимость повреждения или разрушения объекта. Сохранность детали и ее поверхности в процессе захвата;
-
Прочность ЗУ при малых габаритных размерах и массе и высокая надежность работы;
-
Необходимое соответствие с технологическим процессом и смежным оборудованием по точности позиционирования;
-
Простота конструкции, агрегатно-модульный принцип ее построения;
-
Надежность крепления ЗУ к руке манипулятора;
-
Простота управления и малое время срабатывания.
Массу захвата и его габариты обычно стремятся по возможности уменьшить, так как увеличение массы ведет к появлению значительных дополнительных инерционных сил и увеличению деформаций конструкции робота. А увеличение габаритов мешает выполнения рабочих операций в ограниченном пространстве.
1 Расчет усилий захватывания
На рисунке 3 представлена схема расчетной детали.

Рисунок 3 – Схема детали
Материал
заготовки – Сталь 10 ГОСТ 1050-88 ( )
)
Размеры детали:











Определяем вес и центр тяжести детали:
 - объем
цилиндра
- объем
цилиндра





 – объем
детали
– объем
детали
 = 377
= 377 7,825
= 2950 г = 2.95кг – масса детали
7,825
= 2950 г = 2.95кг – масса детали
Вес
детали:

 ;
;
 ;
;



Центр тяжести детали:
 =
=
Принимаем такое положение объекта манипулирования в захватном устройстве, когда объект непосредственно поддерживается пальцами схвата, а силы трения практически не участвуют в удержании. Схема удержания объекта представлена на рисунке 4.
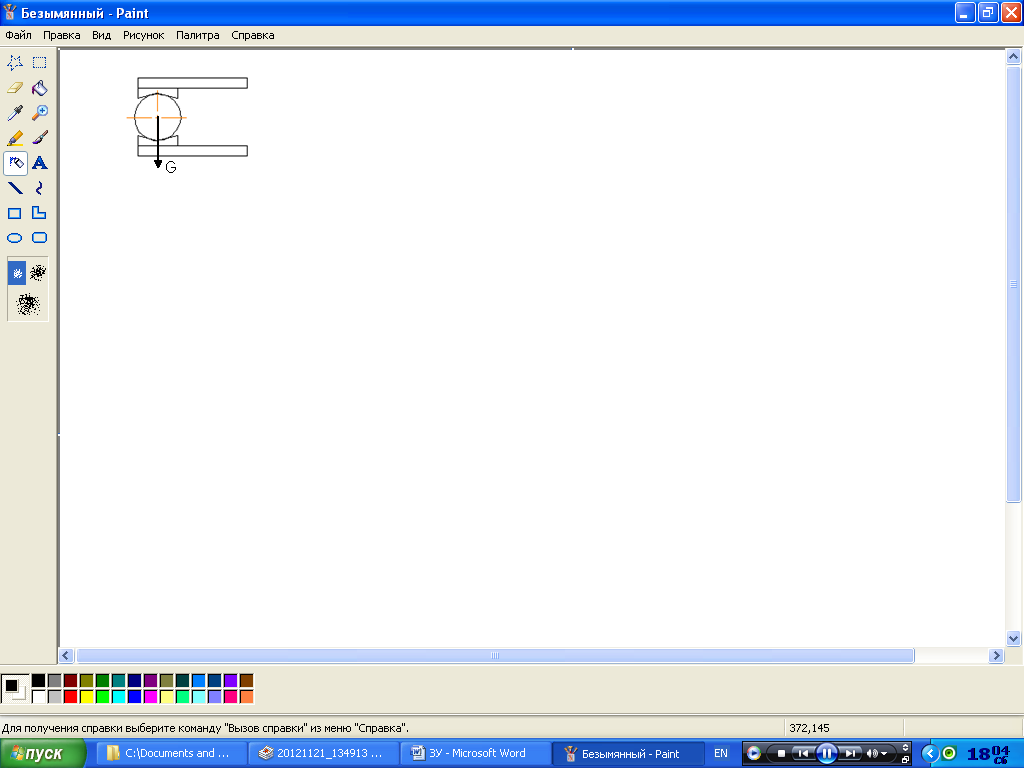
Рисунок 4 – Схема удержания детали
Выбираем тип робота: KR5 ARC
|
|
|
|
Полезная нагрузкПолезная нагрузка |
5 kg |
|
дополнительная нагрузка |
12 kg |
|
|
|
|
|
|
|
|
|
|
Макс. радиус действия |
1412 mm |
|
|
|
|
|
|
|
|
|
|
Количество осей |
6 |
|
Стабильность повторяемости |
<± 0,04 mm |
|
Вес |
127 kg |
|
Монтажное положение |
На полу, потолке |
|
Система управления |
KR C |
Монтажное положение: на полу, на потолке
Деталь будет схватываться за центр тяжести, поэтому дополнительных моментов возникать не будет.
Расчет удерживающих усилий проводится в зависимости от схемы удерживания, формы звеньев, особенностей движения схвата. Рассмотрим три случая движения захватного устройства с объектом манипулирования и определим усилие захватывания. Сила захватывания Fзахв определяется как произведение суммы сил F1 и F2, sin60° и коэффициента запаса k=1,5.
Первый случай – прямолинейное движение.
Исходные данные: V = 1,2 м/с; a= 2,3 м/с2.
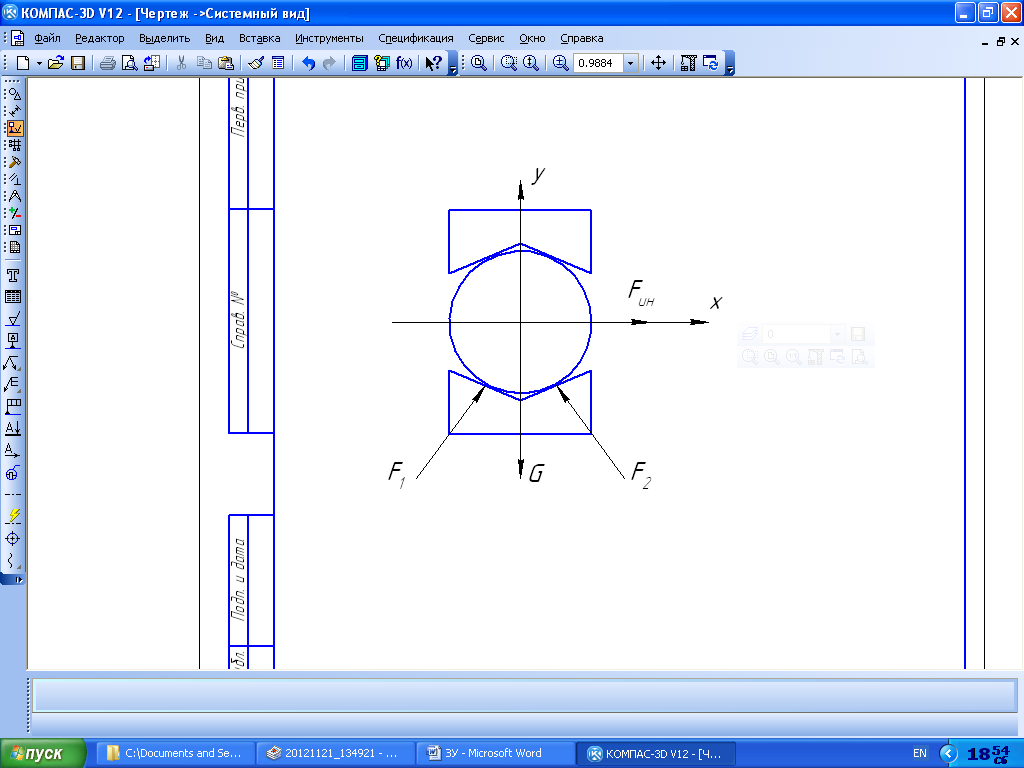
Рисунок 5 – Схема сил, действующих на деталь при прямолинейном движении





Второй случай – движение по окружности.
Исходные данные: R = 1,2 м/с; ω = 1,9 рад/с; ε = 3,6 рад/с2.
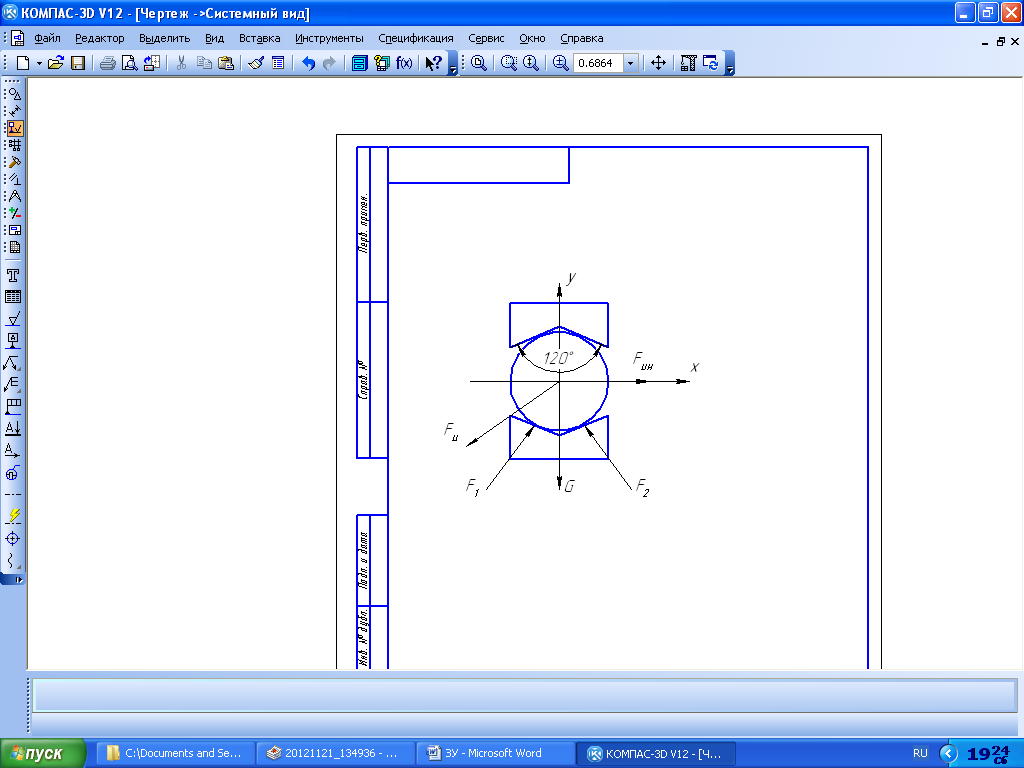
Рисунок 6 – Схема сил, действующих на деталь при движении по окружности
 -
центростремительная сила
-
центростремительная сила
 - сила
инерции
- сила
инерции
Силы без
учета
 :
:


Силы с
учетом :
:
 , где f
= 0,15 – коэффициент трения для стали
, где f
= 0,15 – коэффициент трения для стали

 где
где
 силы без учета инерции
силы без учета инерции

Третий случай – движение вертикально вверх.
Исходные данные: V = 1 м/с; a= 2 м/с2.
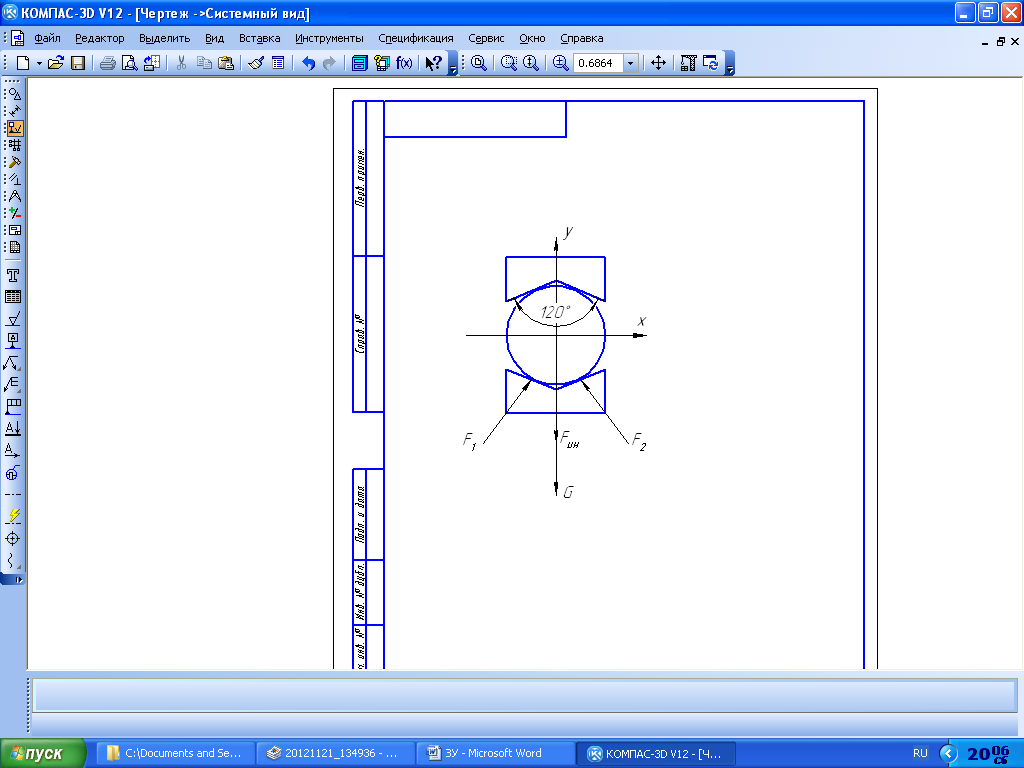
Рисунок 7 – Схема сил, действующих на деталь при движении вертикально вверх