

Техническое обслуживание АЛС / Техническое обслуживание АЛС
.pdfА. А. ЛЕОНОВ
ТЕХНИЧЕСКОЕ
ОБСЛУЖИВАНИЕ
АВТОМАТИЧЕСКОЙ
ЛОКОМОТИВНОЙ
СИГНАЛИЗАЦИИ
ИЗДАНИЕ ПЯТОЕ, ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
МОСКВА «ТРАНСПОРТ» 1982

У ДК 656.259.2.004.5
Леонов А. А. Техническое обслуживание автома тической локомотивной сигнализации.— 5-е изд., перераб. и доп.— М.: Транспорт, 1982.— 255 с.
Излагаются принципы действия различных си стем автоматической локомотивной сигнализации (АЛС), применяемых на железных дорогах СССР.
Приводится порядок обслуживания, проверки и ре монта путевой и локомотивной аппаратуры контроль- но-нспытательными пунктами, описываются исполь зуемые контрольные приборы.
В 5-м издании учтены изменения, которые пре
терпели путевые и локомотивные устройства благо даря внедрению более совершенных схем и повыше нию помехоустойчивости приемников.
4-е издание вышло в 1974 г.
Рассчитана на инженерно-технических работни ков сигнализации и связи и локомотивного хозяй ства, а также может быть использована при проекти ровании устройств локомотивной сигнализации и изучении их студентами вузов и учащимися технику мов и профессионально-технических училищ.
Ил. 112, табл. 7.
Р е ц е н з е н т М. Н. Адаскин З а в е д у ю щ и й р е д а к ц и е й В . П . Репнева
Р е д а к т о р Б. С. Рязанцев
|
3602040000-181 |
Л |
181-82. |
|
049(01)-82 |
© Издательство «Транспорт», 1982
Г л а в а I
Н А З Н А Ч Е Н И Е И П Р И Н Ц И П Д Е Й С Т В И Я А В Т О М А Т И Ч Е С К О Й Л О К О М О Т И В Н О Й С И Г Н А Л И З А Ц И И
1. АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ
Новые технические средства и, в частности, электронновычислительные машины (ЭВМ) и микропроцессоры, а также много численные научные исследования создали благоприятные условия для автоматизации управления сложными системами. Однако в то же время опыт создания систем автоматического управления и их применения показывает, что математические методы построения моделей полностью автоматически управляемых процессов настоль ко сложны, что современные сложные системы автоматического управления в своей структуре наряду с техническими средствами имеют в качестве основного звена человека. Человеку отводятся функции оценки ситуации и принятие окончательных решений исходя из ответственности его за общие конечные результаты управляемого процесса.
Технические средства управления состоят из средств получения, подготовки, сбора и первичной обработки информации о ходе процесса, средств передачи периферийных данных, переработки всей информации для получения команд или рекомендаций по управлению и, наконец, устройств выдачи информации человеку, или устройств автоматической выработки управляющих воздействий.
Современные средства автоматического и автоматизированного (с учетом человека) управления играют большую и все возрастающую роль в управлении такой отраслью народного хозяйства, как желез нодорожный транспорт. Сущность его деятельности состоит в выполнении перевозочного процесса, и автоматизация управления является важным фактором совершенствования этого процесса.
Перевозочный процесс сложен своей динамичностью, взаимной обусловленностью ритма работы его участников, непрерывно меня ющимися ситуациями и воздействиями на него большого числа дестабилизирующих факторов н особенно нуждается в оптимизации.
Функциональная и технологическая структура процесса перевозок сочетает централизованное и децентрализованное управление. Поэто му автоматизация управления на транспорте решает совокупно две задачи: автоматизацию организационно-административных функций и автоматизацию различных исполнительных технологических про цессов с контролем и взаимной связью для совместного решения общих задач.
Автоматизированные системы управления (АСУ) строятся иа основе современных технических средств и, в частности, средств вычислительной техники. Поступившие в распоряжение разработчи ков автоматизации вычислительные машины открывают широкие
3
возможности использования математических методов для управления сложными процессами. Одной из подсистем автоматизации управле ния на железнодорожном транспорте является система управления движением поездов.
Сущность управления движением поездов определяется двумя особенностями рельсового транспорта, которые рельефно видны на примере однопутных участков.
П е р в а я из них состоит в том, что поезда передвигаются по рельсовому пути как бы по одной линии, поэтому на однопутных линиях движение поездов требует такой организации, чтобы во избежание нарушения движения на перегоне между станциями не оказывалось двух или более встречных поездов, так как они могут разъезжаться только на станциях.
Появление на перегоне двух движущихся навстречу поездов абсолютно недопустимо также и по условиям безопасности для поездов. Действительно, если водитель другого вида транспорта может остановиться на коротком расстоянии, исчисляемом десятка ми метров, то машинист поезда лишен этой возможности. Поезд имеет большую массу и при приведении в действие тормозов останавливается, пройдя значительное расстояние, которое может превышать 1—2 км. Естественно, что путь впереди поезда на таком расстоянии не может при всех условиях просматриваться машини стом, а встречно движущиеся поезда, чтобы не столкнуться, должны увидеть друг друга даже на двойном расстоянии, чтобы оба машиниста успели остановить поезда.
Длинные тормозные пути, которые в несколько раз могут
превышать дальность |
обзора пути с локомотива, составляют вто |
р у ю о с о б е н н о с т ь |
железнодорожного транспорта и также требу |
ют отправления поезда только на перегон, свободный от встречных поездов.
Нахождение двух попутных поездов на одном перегоне между станциями (в отличие от встречных) хотя и не приводит к нарушению движения на перегоне, но опасность наезда одного поезда на другой, в частности при остановке впереди идущего, остается очевидной. Поэтому попутные поезда отправляются только на свободный участок между раздельными пунктами. На двухпутных перегонах встречные поезда следуют по разным путям перегона.
Указанные особенности движения рельсового транспорта предоп ределяют три основные составные части процесса движения: диспет черское руководство движением в целом на участке, разграничение попутных и встречных поездов и ведение поезда (рис. 1). Все три составляющих процесса образуют взаимосвязанный комплекс, рпределяющий движение на участке и поэтому подлежащий автоматиза ции.
Автоматизированное управление движением поездов предусмат ривает решение комплекса задач, определяющих продвижение поез дов по участку, таких, как анализ, контроль и корректировка заданий диспетчером на основании моделирования различных вариан тов режима пропуска поездов с расчетом их показателей, автомати ческий выбор оптимального порядка пропуска поездов по одному или нескольким критериям, выполнение принятых решений по команде диспетчера, номерной учет продвижения поездов, указание
4

Разграничение поездов (А6тоВпокировт,АЛС)
Рис. 1. Основные составные части процесса движения поездов
на табло их размещения на участке, сбор информации об отклонени ях в продвижении поездов, отказах технических средств и составле ние оперативной отчетности.
Организация поездным диспетчером самого процесса продвиже ния поездов по участку ведется при соблюдении требований безопас ности с применением технических средств автоматики разграничения поездов на перегонах и станциях.
Вмировой практике происходит размежевание в применении автоматической блокировки с точечной или непрерывной передачей сигналов путевых светофоров на локомотив, с одной стороны, и локомотивной сигнализации как самостоятельного средства разграни чения поездов, с другой, а также между локомотивной сигнализа цией с разграничением блок-участками и дистанциями. При этом преобладающими все же являются системы с разграничением блокучастками, в том числе с автоблокировкой, как более рентабельные, технически более простые и отвечающие условиям работы загружен ных участков со смешанным движением поездов.
Вто же время в конечном счете решения, диктуемые процессом продвижения поездов по участку и исходящие от поездного диспет чера, в том числе при автоматизированной системе управления, а гакже диктуемые средствами разграничения, реализуются при веде нии поезда машинистом и автоматикой.
Что касается технической базы устройств автоматики, то она все время совершенствуется, внедряются новые более прогрессивные технические решения повышающие надежность и дающие новые эксплуатационные качества.
5
2. СРЕДСТВА РАЗГРАНИЧЕНИЯ ПОЕЗДОВ С ЛОКОМОТИВНОЙ
СИГНАЛИЗАЦИЕЙ
На железных дорогах движение поездов производится с разграни чением поездов раздельными пунктами, которыми являются станции и проходные светофоры путевой блокировки. Возможен еще другой способ разграничения поездов, а именно разграничение дистанциями, когда каждый поезд, идущий по перегону, все время получает информацию о свободной впереди дистанции и соответствующей допустимой скорости движения.
На советских железных дорогах и дорогах других стран, за единичными исключениями, применяют разграничение поездов раз дельными пунктами. Этому способу разграничения соответствуют такие основные средства сигнализации и связи при движении поездов, как путевая блокировка и автоматическая локомотивная сигнализация непрерывного типа как самостоятельное средство сигнализации и связи.
Отличительным и непременным признаком путевой блокировки служат раздельные пункты в виде проходных путевых светофоров, непосредственно запрещающих или разрешающих движение поездов на ограждаемый ими блок-участок (перегон) и поэтому допускающих движение только по их сигналам.
При автоматической блокировке — основном виде путевой блоки ровки для железных дорог нашей страны—раздельными пунктами являются проходные светофоры, разделяющие межстанционные перегоны на блок-участки.
При локомотивной сигнализации, применяемой как самостоятель ное средство сигнализации, раздельными пунктами служат границы между блок-участками, а движение осуществляется по сигналам локомотивного светофора. При этом нормальное движение мо жет происходить только при действующих устройствах на локомо тиве.
В случае отказа устройств на локомотиве машинист может вести поезд лишь со скоростью до 20 км/ч, наблюдая за свободностью пути в пределах прямой видимости, до ближайшей станции и далее отправляться только на свободные от поездов межстанционные перегоны.
На отечественных железных дорогах автоблокировка всегда действует совместно с автоматической локомотивной сигнализацией и представляет собой единое комплексное средство сигнализации (АБ-АЛС). При этом движение поездов в местах, где реализуются максимальные скорости движения, осуществляется практически толь ко по сигналам локомотивных светофоров.
Благодаря непрерывной передаче сигналов на локомотив, что является эксплуатационным признаком, локомотивная сигнализация облегчает условия труда машиниста и повышает безопасность движения поездов. Сигналы, будучи воспроизведенными на локомо тиве, легко и безошибочно воспринимаются и осознаются машини стом, что дает ему возможность уверенно вести поезд в любых условиях, даже при плохой видимости сигналов, подаваемых путевы ми светофорами, что, несомненно, повышает безопасность движе ния.
6
Локомотивная сигнализация как самостоятельное (основное) сред ство сигнализации не может отождествляться с автоблокировкой и является отдельным видом средств сигнализации и связи при движении поездов.
Локомотивная сигнализация в эксплуатационном отношении ха рактеризуется, кроме того, значностью сигнализации, т. е. числом сигналов, передаваемых с пути на локомотив. При этом по аналогии с сигнализацией путевых светофоров автоблокировки значность характеризуется числом сигналов, предупреждающих о числе сво бодных впереди блок-участков при движении поезда на перегонах.
Сигнализация путевыми светофорами автоблокировки по их значности не превышает четырехзначную, применяемую на приго родных участках с интенсивным движением пригородных поездов.
Следовательно, классифицируя средства сигнализации, следует различать автоматическую блокировку (АБ-АЛС) и автоматическую локомотивную сигнализацию как самостоятельное (основное) сред ство сигнализации и связи при движении поездов (АЛСО).
Локомотивная сигнализация позволяет, используя поступающую с пути на локомотив сигнальную информацию, кроме того, приме нять технические средства автоматизированного управления разгра
ничительной |
скоростью поезда, |
т. е. скоростью, |
обусловленной |
|
отделением |
одного поезда |
от |
другого. |
|
Т о ч е ч н ы е с и с т е м ы |
передачи сигналов с пути |
на локомотив |
||
не являются средствами сигнализации при движении поездов. К таким системам относятся автоматическая локомотивная сигнализа ция точечного типа (АЛСТ) и точечные автостопы различных модификаций, которые служат для повышения безопасности движе ния поездов, осуществляя точечную передачу сигналов путевых светофоров на локомотив или предупреждая о приближении к закрытому светофору с обязательной при этом проверкой бдительно сти машиниста или ступенчатым контролем снижения скорости при нескольких воздействиях с пути на протяжении тормозного пути.
Локомотивная сигнализация точечного типа при полуавтоматиче ской блокировке оправдала свое назначение, показав достаточную техническую надежность и эксплуатационную эффективность. Сок ращение полигона ее эксплуатации связано с введением на этих участках автоблокировки с локомотивной сигнализацией.
А в т о м а т и з и р о в а н н о е |
у п р а в л е н и е р а з г р а н и ч и т е л ь |
н о й с к о р о с т ь ю имеет целью |
обеспечить принудительными мера |
ми выполнение условий безопасного ведения поезда, основанного на выполнении требований сигналов, подаваемых путевыми и локомо тивными светофорами.
Ксредствам автоматизированного управления относятся сред
ства, начиная с простейших, таких, как проверка бдительности до автоматического регулирования скорости по программе непрерыв ного слежения за фактической скоростью.
Проверка бдительности с принудительной остановкой поезда в случае потери машинистом способности управлять движением поезда является простейшим, но самым распространенным средством обес печения безопасности движения.
Полуавтоматическое регулирование разграничительной скорости, называемое контролем скорости, предусматривает принудительное
7
поддержание машинистом фактической скорости в пределе допусти мой при данном сигнале локомотивного светофора под контролем соответствующих устройств. При этом превышение скорости ведет к принудительной остановке поезда устройствами экстренного тормо жения (полной разрядкой тормозной магистрали), во избежание чего машинист сам вынужден приводить скорость поезда в соответствие с требуемой сигналом.
К о н т р о л ь с к о р о с т и может быть двух видов: плавный и ступенчатый.
При плавном контроле непрерывно в каждый данный момент проверяется соответствие фактической скорости—заданной вплоть до остановки перед закрытым светофором. Превышение скорости вызывает принудительную остановку поезда во избежание проезда закрытого светофора или светофора, требующего проследования с ограниченной скоростью. Техническое осуществление плавного контроля скорости достаточно сложно и связано с определен ным уровнем приспособленности к этому тормозной системы поез дов.
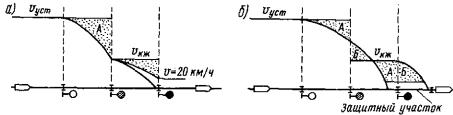
При ступенчатом контроле скорости допускаемая скорость сохра няет на протяжении всего блок-участка одно значение, соответству ющее сигналу светофора (рис. 2). Приведение машинистом фактиче ской скорости поезда в соответствие с допустимой скоростью на блок-участке может предусматриваться предварительно на предыду щем блок-участке или на самом блок-участке после проследования путевого светофора и появления сигнала, требующего снижения скорости. В последнем случае, если фактическая скорость превыша ет допустимую, то, чтобы не наступило из-за этого экстренное торможение, машинист должен привести в действие тормоза с требуемой интенсивностью торможения и с правом отпуска тормо зов, когда фактическая скорость будет доведена до допустимой.
Большее число ступеней снижения скорости дает меньшую потерю скорости и несколько лучшие условия ведения поезда при равной степени гарантии безопасности движения.
При ступенчатом снижении скорости, чтобы в меньшей мере ограничивать выбор режима ведения поезда машинистом, предусмат риваются защитные участки за закрытым светофором для остановки поезда в его пределах при проезде закрытого светофора с допуска емой скоростью на блок-участке перед ним. Освобождение защитно го участка впереди идущим поездом проверяется предыдущим
Рис. 2. Ступенчатый контроль скорости:
а—с предварительным снижением скорости; б—с контролем торможения; А—свободная зона приведения скорости к допускаемой на следующем блок-участке; Б — зона превышения скорости
8
светофором. Число ступеней снижения скорости обычно определяет ся значностью локомотивной сигнализации.
Автоматическое регулирование скорости поезда предусматривает автоматическое поддержание разграничительной скорости в соответ ствии с требованием сигналов с тем, чтобы расстояние до закрытого светофора (занятого блок-участка) не было менее тормозного пути при фактической скорости поезда.
Авторегулировка скорости при локомотивной сигнализации также может быть плавной и ступенчатой. При плавной регулировке на основании имеющейся программы максимально допустимой скорости в зависимости от расстояния между поездом и местом остановки или снижения скорости устройства выполняют процесс программного принудительного торможения.
Наиболее распространена авторегулировка со ступенчатым регу лированием скорости, но не ставящая своей задачей автоматическую остановку поездов у остановочных пунктов (как в метрополитене или при интенсивном пригородном движении).
В непрерывных системах локомотивной сигнализации передача сигналов с пути на локомотив производится индуктивным способом с использованием одной физической цепи в виде ходовых рельсовых нитей пути или шлейфов, уложенных вдоль пути.
Техническое осуществление локомотивной сигнализации состоит в решении двух задач: в контроле рельсовыми цепями свободности блок-участков и передаче сообщений с пути на локомотив раздель ными или общими для них электрическими сигналами. При автобло кировке информация о состоянии блок-участков поступает от ее устройств.
В системах с разграничением поездов дистанциями каждый поезд, идущий по перегону, через определенные короткие промежут ки времени автоматически передает электрическими сигналами свое местонахождение (координату). Эта информация принимается раз дельно от каждого поезда центральным управляющим пунктом, который на основании координат нахождения всех поездов составля ет приказы о допустимой скорости движения для каждого поезда и передает обратно на соответствующие локомотивы. Передача инфор мации с пути на локомотив и с локомотива на путь производится с помощью путевого шлейфа, укладываемого вдоль пути.
Однако следует отметить, что при практическом применении системы с дистанционным разграничением высокоскоростных поез дов система совмещается с разграничением обычных поездов раз дельными пунктами.
Поскольку для передачи многих сигнальных сообщений с пути на локомотив в распоряжении имеется лишь одна физическая цепь, то передача ведется с помощью совокупности электрических сигналов, обладающей различными информационными признаками, отлича ющимися друг от друга. Такая совокупность используемых сигналов называется кодом.
Электрические сигналы локомотивной сигнализации, относящи еся к известным системам, строятся с применением различных методов селекции.
Для более ранних систем локомотивной сигнализации характерно применение электрических сигналов с одной несущей частотой,
9

Рис. 3. Виды кодов АЛС:
а—числовой; б —импульсно-частотный; в—частотный; г—комбинационно-качественный
обычно промышленной, что объясняется ограниченными в период их создания возможностями элементной базы для местного генерирова ния различных частот. К таким кодам относится числовой код (рис. 3, а), применяемый в кодовой автоблокировке и локомотивной сигнализации. Сигналы этого кода различаются между собой числом импульсов в кодовой комбинации, которая всей совокупностью импульсов и интервалов определяет соответствующее ей сообщение. Такое же использование одной несущей частоты характерно для импульсно-частотного кода (рис. 3, б).
Импульсно-частотный код характерен тем, что его электрические сигналы различаются частотой следования импульсов переменного тока несущей частоты. Частота следования импульсов составляет 75, 120, 180 и 270 имп/мин, и сигналы декодируются как имеющие частоту 1,5; 2,0; 3,0 и 4,5 Гц. Современные кодирующие и деко дирующие элементы системы выполняются на бесконтактных эле ментах.
В обеих системах электрические сигналы являются общими для рельсовых цепей и устройств локомотивной сигнализации. Дальней шее развитие систем характеризуется быстродействием, расширени ем диапазона используемых частот и применением различных ча стотных сигналов, информационно модулированных низкой часто той, комбинированных частотных сигналов и некоторыми другими признаками.
Средства разграничения с применением локомотивной сигнализа ции (комплексная система АБ-АЛС и локомотивная сигнализация как основное средство сигнализации—АЛСО) в эксплуатационном отно шении еще могут характеризоваться значностью локомотивной сиг нализации, имея в виду широко эксплуатируемую локомотивную сигнализацию числового кода (АЛСН) и многозначную локомотив ную сигнализацию (АЛСМ), которая начинает внедряться на наших дорогах.
Поскольку существующая система получила полное, совместное с автоблокировкой распространение на всей сети железных дорог, в дальнейшем на участках с многозначной локомотивной сигнализа цией будет иметь место действие одновременно и существующей системы (АЛСН) для возможности обращения локомотивов, не оборудованных многозначной сигнализацией. Локомотивы с много значной сигнализацией в свою очередь, будучи оборудованными обеими системами, способны обращаться и на участках с локомотив ной сигнализацией числового кода. Кроме того, на участках с многозначной локомотивной сигнализацией при прекращении приема частотных сигналов происходит автоматический переход на прием сигнала числового кода, что особенно важно для участков, где
10