

Архив2 / курсач docx180 / kursach_vano
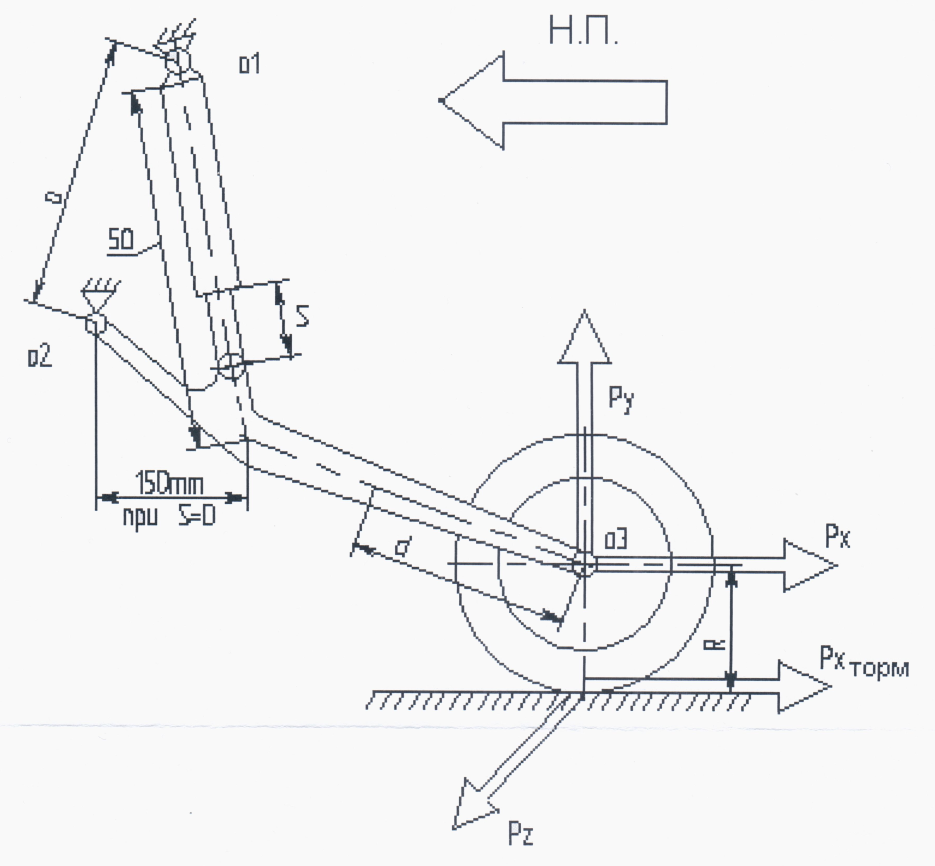
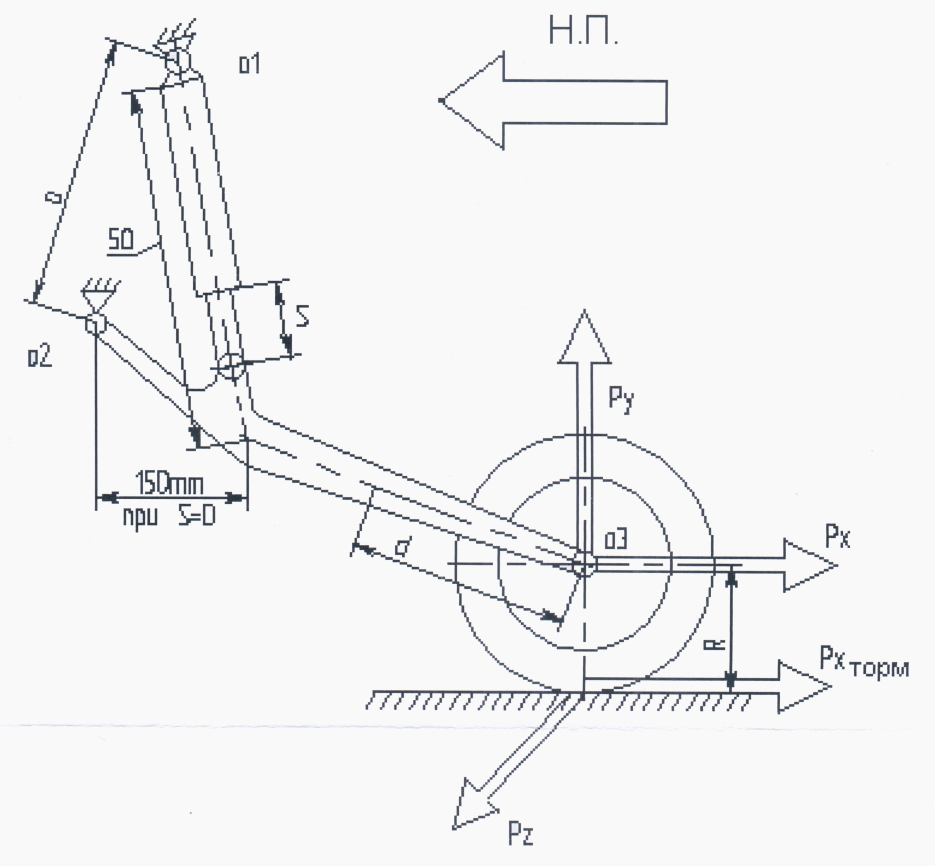
.docxI. Выбор мест наклейки датчиков.
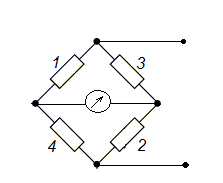
Тензодатчики
размещены в сечении траверсы и штока
амортизатора. Сечение 1/1 измерение
изгибающего момента от сил
 и
и
 в
этом же сечении измерить в другой
плоскости изгибающий момент от силы
в
этом же сечении измерить в другой
плоскости изгибающий момент от силы
 .
.
I-I-изгибающий
момент от сил
 .
.



II-II-изгибающий
момент от силы .
.

Составляем алгебраические уравнения, связывающие измеряемые силовые факторы и действующие на стойки силы.
I-I

II-II

Составленные уравнения разрешаем относительно сил, действующих на опору, используя формулу Крамера.


Cоставленные уравнения приводим к виду:

Изменяя в кинематической схеме обжатие, находим положение подвижных частей стойки и определяем в зависимости от обжатия изменение размеров, определяющих положение тензометрированых сечений.
Таблица 1.
|
S |
a |
b |
|
B |
|
|
0 |
19 |
6 |
48 |
25 |
124 |
|
40 |
19.5 |
6 |
49 |
24 |
130 |
|
80 |
19.5 |
5.5 |
50 |
22 |
136 |
|
120 |
19.5 |
4 |
51 |
19 |
142 |
|
160 |
20 |
3 |
52 |
16 |
149 |
|
200 |
20 |
2 |
52.5 |
14 |
155 |
|
240 |
20.5 |
0.7 |
53.5 |
10 |
159 |
|
280 |
20 |
-1.7 |
54 |
5.5 |
165 |
|
320 |
20 |
-2.5 |
55 |
1.75 |
170 |
|
360 |
19.5 |
-5 |
54 |
-1.85 |
175 |
|
400 |
19 |
-6.5 |
53.5 |
-8.5 |
180 |


Таблица 2.
|
S |
a*B |
b*A |
a*B-b*A |
B/Δc |
c*b |
c*b/Δc |
c*a |
c*a/Δc |
A/Δc |
|
0 |
475 |
288 |
187 |
0,03 |
744 |
4 |
2356 |
12,6 |
0,25 |
|
40 |
468 |
294 |
174 |
0,03 |
780 |
4,5 |
2535 |
14,5 |
0,28 |
|
80 |
429 |
275 |
154 |
0,03 |
748 |
5 |
2652 |
17 |
0,33 |
|
120 |
370 |
204 |
166 |
0,02 |
768 |
3,5 |
2769 |
16,7 |
0,3 |
|
160 |
320 |
156 |
164 |
0,01 |
445 |
2,7 |
2980 |
18 |
0,31 |
|
200 |
280 |
104 |
176 |
0,01 |
310 |
1,7 |
3080 |
17,5 |
0,29 |
|
240 |
205 |
37 |
168 |
0 |
111 |
0,6 |
3259 |
19,4 |
0,31 |
|
280 |
110 |
-91 |
201 |
0 |
-280 |
-1,4 |
3300 |
16,4 |
0,26 |
|
320 |
35 |
-137 |
172 |
-0,01 |
-425 |
-2,5 |
3400 |
19,7 |
0,3 |
|
360 |
-36 |
-270 |
234 |
-0,02 |
-875 |
-3,7 |
3412 |
14,6 |
0,23 |
|
400 |
-161 |
-318 |
157 |
-0,03 |
-1080 |
-6,8 |
3420 |
21,8 |
0,3 |
2. Подбор электрических параметров.
Оценка электрических характеристик измерительных схем при исследовании нагружения шасси производится с целью подбора вибратора в осциллограф и определения дополнительного сопротивления, обеспечивающего его работоспособность.
Для измерения обжатия используем датчик ДЛП:
Определяем радиус приводного диска для измерения заданного обжатия:
R0=800 Ом
S=400мм
2*π*R=400
6,28*R=400

R=63,7
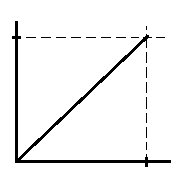
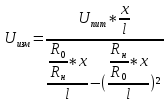
Подбираем сопротивление нагрузки таким образом, чтобы зависимость Uизм=f(S) была практически линейной:
 R0=0,01*RH
R0=0,01*RH
Рассчитываем и строим график, на котором показываем зависимость Uизм=f(S) с учетом 5% запаса по ходу движения:
Uпит=27В
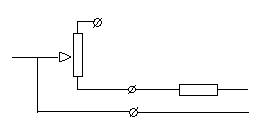
На
схеме включения вибратора для измерения
обжатия указываем все параметры,
подобранные из условия работоспособности
вибратора, используя следующие
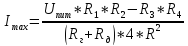
соотношения:
 ;
;
 .
Подбираем тип вибратора.
.
Подбираем тип вибратора.


Imax<Iдоп
0,33 мА < 2 мА
Тип вибратора IV.
hmax=σ*Imax=116*0,33=38,28 ~ 40 мм
Аналогично
измерению обжатия, рассчитываем измерение
нагрузок.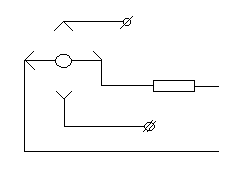
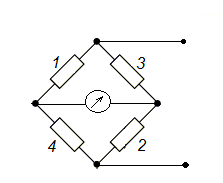
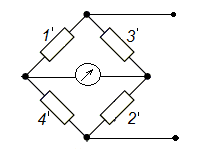
Сопротивление тензомостов принимаем 150 Ом.
При наличии 4 активных датчиков определяем токи тензомостов в зависимости от деформации материала.

Определяем тип вибратора:
Imax<Iдоп
0.4 мА< 2 мА
Тип вибратора IV.
hmax=σ*Imax=116*0.4=46.4 мм
3. Расчет погрешности определения сил.
Для вычисления погрешностей сил приводим формулы для их определения к стандартному виду.
 -
градуированный коэффициент – показатели
т/мостов
-
градуированный коэффициент – показатели
т/мостов
 -
градуированный коэффициент
-
градуированный коэффициент
 – показатели
т/мостов
– показатели
т/мостов
 7
7

P=9600кг
 =0,5мм
=0,5мм
 =1кг
h=40
=1кг
h=40
 7
7