

МІНІСТЕРСТВО ОСВІТИ І НАУКИ, МОЛОДІ ТА СПОРТУ УКРАЇНИ
Національний авіаційний університет
Курсова робота
з дисципліни: “ Основи теорії управління польотом”
Виконав: студент групи 403 ІАСУ
Шипович В. В.
Перевірив: доцент
Троянов П.П.
Варіант № 91
Київ 2012
Національний авіаційний університет
Інститут аерокосмічних систем управління
Кафедра систем управління літальних апаратів
Завдання
на виконання курсової роботи
з дисципліни "Основи теорії управління польотом"
Номер варіанта визначається двома останніми цифрами номера залікової книжки студента. Тема та зміст роботи вибираються з літератури, що приведена нижче. Вихідні дані для розрахунків даються в таблицях для варіантів 1-60, 61-100 на стор.79.
Студент __Шипович Віталій Васильович _ Група № _403____________________
Залікова книжка №____0209091____________ Варіант № _91___________________
Тема: Розгляд руху рискання літака, керованого пілотом, з заданою передавальною функцією ________________________________________________________________________________________________________________________________________________________________
Література: Унгурян «Расчет систем автоматического управления полетом»
Дата видачі завдання: _03 жовтня_ 2012р. Строк здачі роботи: ________2012р.
Студент ____Шипович В. В. ___ Керівник ______________________
Зміст
Завдання
Теоретична частина
Розрахункова частина
Висновок
Список використаної літератури
Завдання:
Рахуючи,
що вектор швидкості є нерухомим ( )
і відсутній рух крену.
Розглянути рух рискання
літака, який управляється пілотом з
передаточною функцією
)
і відсутній рух крену.
Розглянути рух рискання
літака, який управляється пілотом з
передаточною функцією

Скласти структурну схему замкнутої системи з законом регулювання:

і
визначити передаточний коефіцієнт
 ,
що забезпечує наступні динамічні
характеристики системи:
,
що забезпечує наступні динамічні
характеристики системи:
а)
запаси стійкості розімкненої системи
повинні бути по амплітуді по
фазі
по
фазі
 ;
;
б)
смуга частот пропускання замкнутої
системи по відношенню до управляючого
впливу
 повинна бути не менше
повинна бути не менше =1,2 1/сек; показник коливальності
амплитудної частотної характеристики
– не вище М=1,25.
=1,2 1/сек; показник коливальності
амплитудної частотної характеристики
– не вище М=1,25.
2.
Побудувати перехідний процес
 при одиничному ступінчастому впливі
управляючого сигналу
при одиничному ступінчастому впливі
управляючого сигналу .
Перерегулювання повинне бути не більше
30%.
.
Перерегулювання повинне бути не більше
30%.
|
Варіанти |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
61,66,71,76,81,86,91,96 |
-0,25 |
0,08 |
0,12 |
-6,0 |
-8,0 |
-2,5 |
-7,5 |
-0,01 |
-0,9 |
110 |
5×10-5 |
8×10-6 |
0,1 |













1. Теоретична частина:
Рух рискання
Якщо вважати кут крену рівним нулю, то плоский рух літака характеризується зміною кутів ковзання і рискання і називається рухом рискання. Для аналізу цього руху необхідно взяти рівняння сил уздовж поперечної осі Oz
 ;
;
рівняння моментів відносно вертикальної осі Оу
 ;
;
і кінематичне рівняння
 ,
,
 а)
а)
 ; в) (1)
; в) (1)
 . д)
. д)
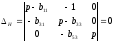
Прирівнюючи нулю головний визначник системи (1), знайдемо характеристичне рівняння руху рискання:
 .
.
Після розкриття визначника отримаємо:
 , (2)
, (2)
де
 ;
;
 .
.
Для
вивчення динамічних характеристик руху
рискання розглянемо передавальні
функції параметрів
 і
і по
відношенню до керуючого впливу
по
відношенню до керуючого впливу і збурюючих впливів
і збурюючих впливів та
та
 .
.
Передавальна функція
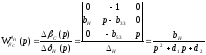
характеризує
зміну кута ковзання
 (або пов'язаної з ним бічної сили) при
відхиленні руля напряму.
(або пов'язаної з ним бічної сили) при
відхиленні руля напряму.
Коефіцієнт
 від'ємний: позитивному відхиленню руля
від'ємний: позитивному відхиленню руля (вправо) відповідає негативна зміна
кута
(вправо) відповідає негативна зміна
кута .
.
Представимо
передавальну функцію у вигляді коливальної
ланки: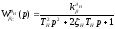 , (3)
, (3)
де  ;
; ;
; .
.
Коефіцієнт
відносного демпфування
 зазвичай лежить в межах 0,1-0,3, і при
побудові амплітудних логарифмічних
характеристик необхідно вводити поправки
до асимптоти, оскільки в області
спряжуючої частоти
зазвичай лежить в межах 0,1-0,3, і при
побудові амплітудних логарифмічних
характеристик необхідно вводити поправки
до асимптоти, оскільки в області
спряжуючої частоти помилка
може досягти 12-16 Дб.
помилка
може досягти 12-16 Дб.
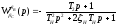
Передавальна
функція, що визначає керованість кута
рискання
 по рулю напрямку, має вигляд:
по рулю напрямку, має вигляд:
 .
.
Після приведення до стандартного вигляду отримаємо:

 ,
,
Стала
часу
 ,
коефіцієнт
,
коефіцієнт <0
(при позитивному відхиленні руля кут
<0
(при позитивному відхиленні руля кут зменшується). Передатна функція (4)
складається з трьох ланок:
зменшується). Передатна функція (4)
складається з трьох ланок:
1).
Коливальної
 ;
;
2).
Інтегруючої
 ;
;
3).
Диференціюючої першого порядку
 .
.
На
мал.1 представлені логарифмічні
характеристики складових ланок і їх
суми (а
- ЛАЧХ, б
- ЛФЧХ). При ступінчастому одиничному
відхиленні руля напрямку напряму
 кут рискання змінюється безперервно і
граничне значення
кут рискання змінюється безперервно і
граничне значення
 ,
,
тобто
літак здійснює плоский розворот з
постійним кутом ковзання
 [див. формулу (3)]. Зауважимо, що моменту,
створюваному рулем направлення, протидіє
момент шляхової стійкості, пропорційний
куту ковзання. Тому управління розворотом
за допомогою тільки руля напрямку не є
ефективним.
[див. формулу (3)]. Зауважимо, що моменту,
створюваному рулем направлення, протидіє
момент шляхової стійкості, пропорційний
куту ковзання. Тому управління розворотом
за допомогою тільки руля напрямку не є
ефективним.
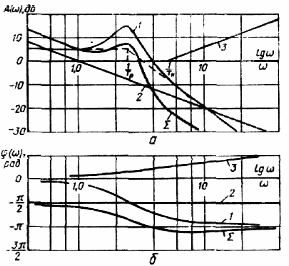
Мал. 1.
Однак
в системах автоматичної стабілізації
при невеликих відхиленнях від
заданого значення таке управління може
бути використане. Перехідний процес
для розглянутого випадку показаний
на мал.2.
від
заданого значення таке управління може
бути використане. Перехідний процес
для розглянутого випадку показаний
на мал.2.

Мал.2.
Передавальні функції по моменту збурення Му відрізняються від (3) і (4) тільки величинами коефіцієнта передачі.
Розглянемо динамічні характеристики літака при боковому вітрі. Під дією бокового вітру змінюється повітряний кут ковзання, з'являється бокова сила і викривляється в плані траєкторія польоту; одночасно під дією моменту шляхової стійкості змінюється кут рискання.
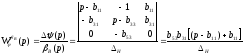
Передавальна функція
визначає
зміну кута ковзання
 .
З урахуванням виразу (2) для
.
З урахуванням виразу (2) для перепишемо функцію
перепишемо функцію наступним чином:
наступним чином:
 (5)
(5)
де
 .
.
З
виразу (5) випливає, що після загасання
перехідних процесів при ступінчастому
впливі бічного вітру
 усталене значення кута ковзання
усталене значення кута ковзання дорівнює
куту вітру, взятому з оберненим знаком:
дорівнює
куту вітру, взятому з оберненим знаком:

 =
-
=
-
 .
.
Цей
результат є очевидним і випливає з
співвідношення
 ,
якщо врахувати, що в усталеному режимі
повний (повітряний) кут ковзання
,
якщо врахувати, що в усталеному режимі
повний (повітряний) кут ковзання дорівнює
нулю (прискорення дорівнюють нулю).
дорівнює
нулю (прискорення дорівнюють нулю).
Знайдемо передатну функцію, що характеризує зміну кута рискання при бічному вітрі:
 ,
,
або
 . (6)
. (6)
Коефіцієнт
 від’ємний і менше одиниці по модулю:
при позитивному вітрі (праворуч) літак
розвертається вправо на кут, менший
кута вітру.
від’ємний і менше одиниці по модулю:
при позитивному вітрі (праворуч) літак
розвертається вправо на кут, менший
кута вітру.
Побудова
логарифмічних частотних характеристик
для передавальної функції (5) провадиться
шляхом підсумовуванні характеристик
складових ланок: коливальногї
 та диференціюючої першого порядку
та диференціюючої першого порядку .
Слід враховувати поправки в амплітудній
характеристиці коливальногї ланки в
зв'язку з малою величиною. Вплив на літак
моменту збурення щодо вертикальної осіМу
(відмова двигуна) визначається
передавальними функціями
.
Слід враховувати поправки в амплітудній
характеристиці коливальногї ланки в
зв'язку з малою величиною. Вплив на літак
моменту збурення щодо вертикальної осіМу
(відмова двигуна) визначається
передавальними функціями
 ;
;
 , (7)
, (7)
відмінними
від (3) і (4) величинами передавальних
коефіцієнтів
 та
та .
.
У
деяких випадках при розгляданні руху
рискання не враховується вплив бокових
сил на літак [рівняння. (1а)]. При цьому
траєкторія польоту є прямолінійною
(вектор шляхової швидкості нерухомий)
і має місце співвідношення
 .
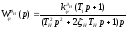
Рівняння (1в) перепишеться таким чином:
.
Рівняння (1в) перепишеться таким чином:
 (8)
(8)
У правій частині рівняння (8) враховується тільки керуючий вплив, так як реакція літака на боковий вітер аналогічна.
Передавальна функція
 , (9)
, (9)
де  ;
; ;
; ,
,
істотно відрізняється від передавальної функції (4). Вираз (9) може бути використано для наближених розрахунків; перехідні процеси відповідають дійсності в невеликому початковому інтервалі часу (2 - 5 с).