Архив2 / курсач docx283 / Kursach_po_el-ke
.docxМОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ РАДИОТЕХНИКИ ЭЛЕКТРОНИКИ
И АВТОМАТИКИ
Курсовая работа по «Электронике»
На тему:
«Цифровой ШИМ - контроллер»
Руководитель курсовой работы:
Серов В.Н.
Выполнил:
Полозов В.С.
гр. КБ-41-10
Москва, 2011
Задание курсовой работы
Вариант № 3
«Цифровой ШИМ - контроллер»
Исходные данные и основные требования:
Основные технические параметры:
а) Частота ШИМ - сигнала 400 Гц
б) Количество градаций ШИМ - сигнала 16
в) ШИМ - контроллер на основе вычитающего счётчика TTL/74ХХ
д) ШИМ - контроллер разработать на микросхемах TTL/74ХХ серии SN74. Провести отработку основных блоков контроллера на логических элементах – Logic Gates (Ideal) и на D-триггерах (Ideal), составить схемы блоков контроллера на реальных TTL ИС – 4-ЛЭ и 2-D триггера в корпусе заданной серии.
г) Подготовить заказные микросхемы на основные блоки контроллера - генератор тактовых импульсов, делитель частоты и основной блок.
Основные требования:
Составить структурную и принципиальную схемы котроллера, провести отработку отдельных блоков в программной среде EWB, провести обоснованный выбор необходимых микросхем.
Представить принципиальную электрическую схему ШИМ - контроллера.
Цифровой ШИМ – контроллер
ШИМ (широтно-импульсная модуляция), англ. PWM— pulse width modulation. ШИМ - это цифровой сигнал, с помощью которого можно задать и управлять в широких пределах уровнем аналогового сигнала с помощью ключей.
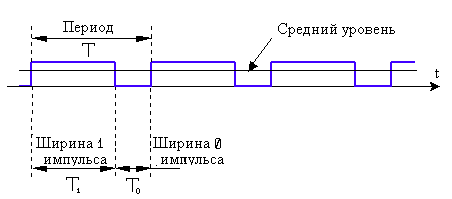
Рис.1. Временная диаграмма ШИМ
. Это особенно важно в мощных регуляторах с высоким КПД, так как на ключах рассеивается минимальная мощность только в момент переключения.
На рис.1 приведена временная диаграмма ШИМ с постоянной скважностью. На одном периоде укладывается один единичный импульс шириной T1 и один нулевой импульс шириной T0. При этом T=T1+T0=const. Период ШИМ -.T, а, следовательно, частота следования импульсов F=1/Т - величина постоянная. Коэффициент ШИМ G - это и есть эквивалент амплитуды аналогового сигнала: G=T1/T (0 £ G£ 1). Изменением длительности импульса Т1 можно регулировать средний уровень напряжения: если уровень максимального сигнала ШИМ Um=Еп, то подав сигнал ШИМ на фильтр напряжения, на выходе фильтра можно получить аналоговое напряжение U=Um×G.
В некоторых случаях применение фильтра необязательно – например, при регулировании тока для управления яркостью свечения накала лампы, скорости вращения двигателя, так как у них есть некоторая постоянная времени, и если период ШИМ меньше этой постоянной, то мерцания или вибрации двигателя не будет. Но в некоторых случаях без фильтра не обойтись. Естественно, чем меньше период ШИМ, тем "глаже" будет аналоговый сигнал, но уменьшение периода ведёт к тому, что увеличивается дискретность регулирования скважности, растет частота следования импульсов F и, соответственно, растут потери мощности на ключах, снижается КПД.
Преобразователи аналогового сигнала в ШИМ импульсы получили название ШИМ - модуляторов, так как они используются широко в кодово-импульсной связи, простейших устройствах автоматики. Преобразователи двоичного кода в ШИМ импульсы получили особое распространение с развитием микропроцессорной техники, являются встроенными устройствами большинства современных микроконтроллеров. В литературе получили название ШИМ - контроллеры.
У аналогово-цифровых ШИМ - модуляторов и цифровых ШИМ - контроллеров много общего (см. рис. 2). Генератор синхронизирующих импульсов задает период (Т) и частоту следования импульсов ШИМ (F=1/Т). Формирователь пилообразного сигнала генерирует линейно изменяющийся сигнал. Устройство сравнения фиксирует момент времени, когда линейно изменяющийся сигнал достигнет уровня управляющего сигнала Uo. На выходе формируется импульсный сигнал от начала временной развертки до момента равенства. В ШИМ - модуляторах управляющий сигнал аналоговый, в ШИМ - контроллерах - цифровой. Это определяет конкретную схемотехнику (аналоговую или цифровую) генератора пилообразного сигнала и схемы сравнения.
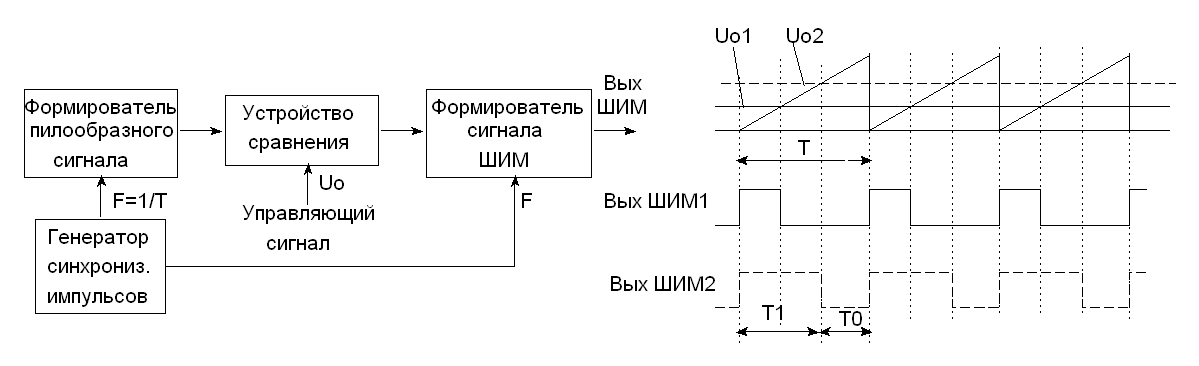
Рис.2 Структурная схема ШИМ преобразования
От уровня управляющего сигнала Uo зависит длительность цифрового импульса ШИМ – Т1 и, соответственно, коэффициент ШИМ G. Критерием качества ШИМ - преобразователя является коэффициент нелинейности d% зависимости G от управляющего сигнала U.
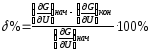 ,
,
где
 и
и
 - крутизна преобразования в начале и в
конце характеристики
- крутизна преобразования в начале и в
конце характеристики
Принципы построения ШИМ – контроллеров
ШИМ контроллеры с цифровым управлением выполняются на счетчиках, которые, последовательно считая импульсы синхронизации, выдают на выходе линейно изменяющийся код, нарастающий или убывающий – в зависимости от режима счета суммирующего или вычитающего. Цифровой компаратор сравнивает входной управляющий код с кодом счетчика и формирует ШИМ импульс в соответствии с функциональной схемой (рис.2). Точность преобразования определяется разрядностью счетчика.
ШИМ - контроллер на реверсивном счетчике
Наиболее просто реализуется схема ШИМ - контроллера на реверсивном счетчике, у которого имеется входы параллельной записи информации. Детали схемы могут незначительно отличаться, в зависимости от используемой ИС счетчика.

Рис.3 ШИМ контроллер на реверсивном счетчике К561ИЕ13
Реверсивный счетчик DD1 включен в режим вычитания: перед началом каждого такта ШИМ в счетчике устанавливается код в соответствии с входным управляющим кодом. Старт-стопный триггер DD3 с приходом запускающего импульса F устанавливается в Q=1, при этом переключает счетчик из режима параллельной загрузки в режим счета на вычитание (EWR). При переходе кода счетчика через состояние 0000 на выходе переноса CR0 появляется инверсный импульс. Сброс триггер DD3 в состояние 0 должно происходить по перепаду 1/0 сигнала переноса CR0. Но так как вход R триггера DD3 асинхронный, тактовую привязку импульса CR0 выполняет триггер DD2. В паузе между импульсами ШИМ триггер DD3 находится в нулевом состоянии и на вход разрешения параллельной записи в счетчик -EWR подан логический нуль. Цикл завершен, схема ждет прихода следующего тактового импульса F.
Генератор тактовых импульсов F задает частоту повторения импульсов ШИМ. Частота генератора синхроимпульсов fc должна быть, по крайней мере, в Ксч раз больше чем частота следования тактовых импульсов F.
ШИМ - контроллер на асинхронном счетчике
Асинхронные счетчики ориентированы на простейшие применения, как правило, отсутствуют входы параллельной загрузки кода, направление счета только прямое. Поэтому ШИМ - контроллер строится несколько иначе, чем предыдущая схема.
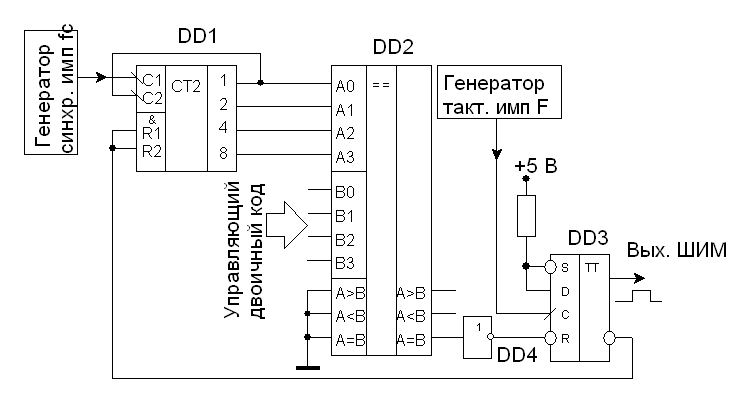
Рис.4 ШИМ контроллер на асинхронном счетчике К555ИЕ5 (DD1) и цифровом компараторе К555ЛП5 (DD2)
Двоичный счетчик DD1 генерирует линейно нарастающий код, который сравнивается с управляющим входным кодом цифровым компаратором DD2.При равенстве кодов формируется сигнал сброса (R) стартстопного триггера DD3. Запуск триггера происходит по перепаду 0/1 импульса генератора тактовых импульсов F. После обнуления триггера со следующего тактового импульса начинается новый цикл. ШИМ сигнал снимается с выхода триггера.
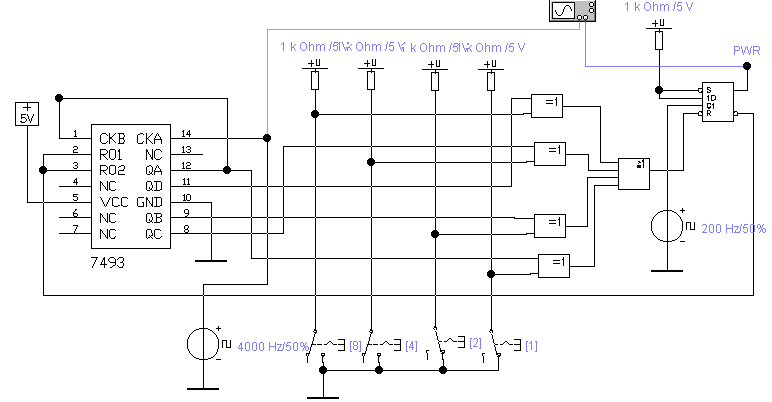
ШИМ - контроллер на вычитающем счетчике 7493
Счетчик 7493 – асинхронный 4-х разрядный двоичный счетчик с кодами от 9 до 15.
|
Вход |
Выход |
|
RO1 RO2 |
Qd Qc Qb Qa |
|
1 1 |
0 0 0 0 |
|
0 X |
Count |
|
X 0 |
Count |
Первый триггер (CKA-вход, Qa-выход) включен независимо. Остальные триггеры включены как последовательный счетчик (CKB-вход, Qb,Qc.Qd – выходы). Чтобы реализовать 4-х разрядный счетчик, необходимо соединить Qa и CKB.