

termex / Theoretical_Mechanics_part_02_04
.pdfСтатика |
Краткий курс Теоретической Механики |
39 |
§ 7. Произвольная система сил. 7.1. Основная лемма.
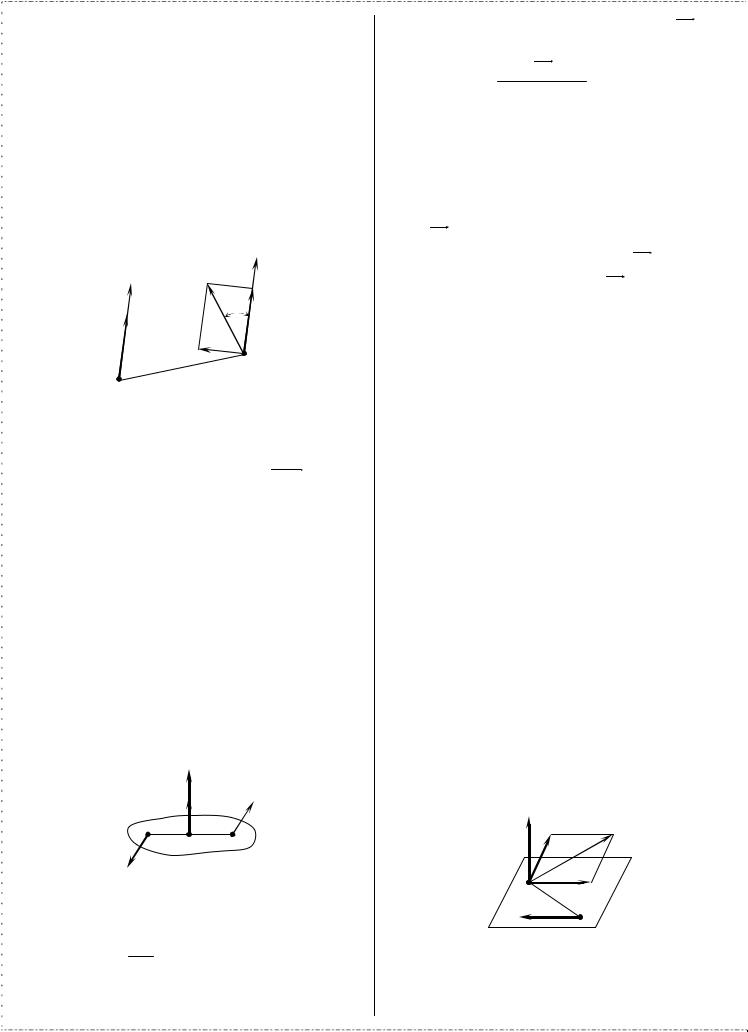
Всякая сила, приложенная к АТТ в данной точке A ,
эквивалентна той же силе, приложенной в другой точкеB , и паре сил, момент которой равен моменту силы, приложенной в точке A , относительно точки B .
Пусть в точке |
A твердого тела приложена сила |
FA . |
|||||||
Приложим к точке B две взаимно противоположные силы |
|||||||||
FB и FB′ , равные по величине силе FA и параллельные |
|||||||||
этой силе. |
|
|
|
|
|
|
|
|
|
|
|
|
FB |
|
FA |
|
|
||
|
|
|
|
|
|
|
|
||
|
|
B |
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FB′ |
|
|
|
|
|
|
|
|
Тогда |
FA ~ (FA , FB , FB′ |
) . |
Но |
силы |
FA |
и |
FB′ |
||
составляют |
пару, |
поэтому |
имеем |
FA ~ {FB ; (FA , FB′ )} , |
|||||
причем момент |
пары |
(FA , FB′ |
) будет равен |
моменту |
|||||
|
|
|
|
|
|
|
|
r |
|
данной силы FA относительно точки B , т.е. |
BA × FA . |
|
|||||||
Лемма доказана. |
|
|
|
|
|
|
|
||
7.2. Приведение пространственной системы сил. |
|||||||||
Пусть |
мы |
имеем |
произвольную |
систему |
сил |
||||
F1 , F2 , F3 ,K, Fn , действующих на АТТ и как угодно расположенных в пространстве.
Выберем произвольный центр O и перенесем все силы системы в этот центр. От перенесения каждой силы мы получим силу и пару, момент которой равен моменту переносимой силы относительно выбранного центра O .
R |
|
F1 |
Μo |
|
F2 |
|
|
|
|
r1 |
r2 |
|
|
|
O |
|
Fn |
rn
Складывая все силы в центре O , мы получим одну результирующую силу
r n r |
|
R = ∑Fi . |
(7.1) |
i =1
Складывая моменты всех пар сил, получим вектормомент результирующей пары
r |
n |
r |
|
Μo |
= ∑(rri |
× Fi ) . |
(7.2) |
i=1
Величина R , равная векторной сумме всех сил системы, называется главным вектором системы сил, а величина
Μo , равная векторной сумме моментов всех сил системы
относительно центра O , называется главным моментом системы сил относительно этого центра O .
7.3. Перемена центра приведения.
Пусть пространственная система сил приведена к центру O и заменена результирующей силой R и парой сил с моментом Μo , который с направлением R образует некоторый угол α.
Возьмем новый центр приведения O′. Поскольку вектормомент Μo есть свободный вектор, то мы переносим его в центр O′ без изменения направления и величины. Перенесение главного вектора R по основной лемме должно сопровождаться добавлением в точке O′ момента главного вектора R относительно нового центра O′.
Таким образом, в результате приведения системы векторов {R, Μo } к новому центру O′ мы имеем систему
векторов {R, Μo′} .
Следовательно, при изменении центра приведения главный вектор R системы сил не изменяется, а главный
|
|
′ |
|
r |
равную моменту |
момент изменяется на величину O O × R , |
|||||
главного вектора R , |
приложенного |
в |
старом центре |
||
приведения – O , относительно нового центра приведения – |
|||||
O′, т.е. |
|
|
|
|
|
α |
|
Μo |
|
|
Μo′ |
|
|
|
|
||
R |
|
r |
|
|
|
O |
|
|
|
|
|
|
OO′× R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Μo |
|
|
R′ |
|
|
|
|
r |
r |
O′ |
r |
|
|
′ |
|
|
|||
|
|
× R |
. |
(7.3) |
|
Μo′ = Μo + O O |
|||||
7.4. Инварианты приведения.
Поскольку при изменении центра приведения главный
вектор системы сил R не изменяется, то он представляет собой инвариант пространственной системы сил по отношению к изменению центра приведения, т.е.
R′ = R . |
(7.4) |
Вторым инвариантом системы |
будет скалярное |
произведение главного вектора R на главный момент Μo , т.е. величина R Μo = R Μo cos α, или же проекция главного момента на направление главного вектора, т.е. величина Μo cos α , (поскольку R сам есть инвариант).
Покажем это.
|
|
|
Μo′ |
|
R′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Μo |
R |
|
|
|
||
|
|
|
|
|
α |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
O′ |
|
|
|
O |
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для центра O′, из (7.3)-(7.4) имеем: |
|
|
|
|
|||||||||
|
|
′ |
|
|
r |
r |
|
′ |
r |
|
|
|
|
|
R |
= R |
|
и Μo′ |
= Μo |
|
откуда |
|
|
||||
r′ |
|
|
+ O O × R , |
′ |
|
||||||||
r |
|
r |
|
r |
′ |
|
r |
r r |
|
r |
r |
||
R |
Μo′ |
|
= R |
|
(Μo + O O |
× R) = |
R Μo |
+ |
R (O O × R) . |
||||
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
2 апреля 2007 г. |
Статика |
Краткий курс Теоретической Механики |
40 |
Но второй член правой части равен нулю, следовательно,
R′ Μo′ = R Μo = const или Μo cos α = const . (7.5)
7.5. Приведение системы сил к динаме.
Если центр приведения O выбран произвольно, то главный вектор R и главный момент Μo системы сил будут составлять между собой некоторый угол α.
Разложим главный момент Μo на две составляющие: составляющую ΜR , направленную вдоль главного вектора
R , и составляющую Μ , перпендикулярную к главному вектору R . Таким образом, Μo = ΜR + Μ .
r
R
Μo R
α ΜR
ΜR
Μ
O
O*
Вектор ΜR , как коллинеарная составляющая главного момента Μo по направлению главного вектора R , есть для
данной системы сил величина постоянная и не зависящая от |
||||||||
|
|
|
|
|
|
r |
|
|
выбора центра |
приведения, т.е. ΜR = const , |
причем |
||||||
численно |
|
|
|
|
r r |
|
|
|
|
|
|
|
|
|
|
||
Μ |
R |
= Μ |
o |
cos α = |
R Μo |
= const . |
(7.6) |
|
R |
||||||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
||
Таким образом, с изменением центра приведения будет изменяться только перпендикулярная составляющая Μ .
Мы всегда сможем найти такой центр приведения O* , чтобы переменная составляющая Μ обратилась в нуль.
Тогда главный момент Μo и главный вектор R будут направлены по одной прямой, т.е. будут коллинеарными, а вектор Μo будет минимален по величине и равен ΜR .
Совокупность силы и пары сил, вектор-момент которой коллинеарен силе, или, что то же, совокупность силы и пары, лежащей в плоскости, перпендикулярной силе, носит название динамы или динамического винта.
r
Μ
R |
r |
|
F |
r |
O* |
F′ |
|
Центр O* , при приведении к которому система сил заменяется динамой, можно аналитически определять из условия, что для этого центра ΜR ↑↑ R , т.е.
r |
|
r |
r |
|
|
|
ΜR |
= p = |
R Μo |
, |
(7.7) |
||
r |
|
|
||||
R2 |
||||||
R |
|
|
|
|||
где p – постоянная линейная величина, называемая
параметром винта.
|
|
|
r |
r |
r |
Так как, согласно равенству (7.3) ΜR |
= Μo |
− OO* × R , |
|||
то уравнение (7.7) можно переписать в виде |
|
||||
r |
|
r |
|
|
|
M |
o |
− OO* × R |
= p . |
|
(7.8) |
|
r |
|
|||
|
|
|
|||
R
Этому уравнению удовлетворяет бесконечное множество точек, лежащих на общем направлении векторов
R и ΜR . Следовательно, уравнение (7.8) есть уравнение
прямой, которую называют центральной осью системы сил.
Равенство (7.8) выражает уравнение центральной оси в векторной форме, причем текущей координатой является
вектор OO* .
Если координаты векторов R , Μo , OO* обозначить
R(Rx , Ry , Rz ) , Μo (Μx , Μy , Μz ) , OO* (x* , y* , z* ) , то в
проекциях на оси координат уравнение центральной оси примет вид
Μx − (y* Rz − z* Ry ) |
= |
Μy − (z* Rx − x* Rz ) |
= |
|
||
|
|
|
|
|
||
Rx |
|
|
Ry |
(7.9) |
||
|
Μz − (x* Ry − y* Rx ) |
|
|
|||
= |
= p. |
|
||||
|
|
|||||
Rz
Итак, всякая система сил, действующих на АТТ, для
которой второй инвариант R Μ не равен нулю,
приводится к динаме, которую образуют главный вектор R , направленный по центральной оси системы, и пара сил с моментом ΜR .
7.6. Приведение системы к двум силам.
Покажем, что всякую систему сил, действующих на АТТ, для которой второй инвариант не равен нулю
R Μo ≠ 0 , еще можно привести к двум силам, одна из которых проходит через заданную точку O .
Приведем систему к центру O . Тогда получим в центре
O результирующую силу, равную главному вектору R , и результирующую пару с моментом, равным главному
моменту Μo .
Представим Mo в виде пары сил (F, F′) , одна из которых F проходит через точку O . Тогда вся система приведется к двум силам: Q = R + F и F′ , которые будут
лежать в разных плоскостях, причем сила Q будет проходить через заданную точку O .
Μo R |
Q |
O |
F |
F′ |
|
Если же Μo R , т.е. Μo R = 0 , то R будет лежать в плоскости пары (F, F′) , и, следовательно, силы Q и F′
будут лежать в одной плоскости, а вся система сил приведется к одной силе – равнодействующей.
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
2 апреля 2007 г. |
Статика |
Краткий курс Теоретической Механики |
41 |
Если же при этом R = 0 , то, очевидно, что вся система приведется к паре сил.
7.7. Случаи приведения.
Выше мы показали, что всякая система сил, приложенных к АТТ, при приведении к данному центру
заменяется результирующей силой R , равной главному вектору системы, и результирующей парой с моментом
Μo , равным |
главному |
моменту |
системы относительно |
|
|
r |
|
этого центра. |
Векторы |
R и Μo |
называются элементами |
приведения системы. Их значения определяются формулами (7.1) и (7.2), или вытекающими из этих формул равенствами
n
Rx = ∑Fix , i=1
n
Ry = ∑Fiy , i=1
n
Rz = ∑Fiz, i=1
n |
r |
|
|
Μx = ∑momx |
(Fi ), |
|
|
i=1 |
|
|
|
|
|
|
|
n |
r |
|
|
|
(7.10) |
||
Μy = ∑momy (Fi ), |
|||
i=1 |
|
|
|
n |
r |
|
|
Μz = ∑momz (Fi ). |
|
||
i=1 |
|
|
|
В зависимости от значения инвариантов системы и элементов приведения можно различать следующие случаи приведения системы сил.
1.) R Μ ≠ 0 .
Система приводится к динаме {R, ΜR } с параметром
r |
r |
|
|
|
|
лежащим в разных |
|||
p = ( R Μ) / R2 , или к двум силам, |
|||||||||
плоскостях. |
|
|
|
|
|
|
|
|
|
2.) R Μ = 0 . |
|
|
|
|
|
|
|
||
Здесь возможны следующие частные результаты: |
|
|
|||||||
А) |
Если R ≠ 0 , |
то |
система |
сил |
приводится |
к |
|||
равнодействующей, равной главному вектору R . |
|
||||||||
Это вытекает из того, |
что при R Μ = 0 будет |
p = 0 и, |
|||||||
согласно |
равенству |
(7.7), |
ΜR = 0 . |
Следовательно, |
|||||
динама |
вырождается |
в |
одну |
силу |
R , |
т.е. |
|||
равнодействующую. При этом линия действия R совпадает с центральной осью системы (которая задается уравнениями (7.9), если в них положить p = 0 ). Если
одновременно и Μ = 0 , то равнодействующая будет, очевидно, проходить через центр приведения O .
Если же Μ ≠ 0 , то равнодействующая R проходит через некоторый другой центр O* . Таким образом, для
того, чтобы система сил имела равнодействующую, необходимо и достаточно выполнения двух условий
R ≠ 0 и R Μ = 0 для любого центра приведения.
Б) Если R = 0 , но Μ ≠ 0 , то при этом, как видно из (7.3), Μo′ = Μo , т.е. главный момент не зависит от выбора центра приведения. Система приводится в этом случае к паре сил с моментом Μr o = ∑momo (Fi ) ,
где O есть произвольный центр.
В) Если R = 0 и Μ = 0 , то система сил эквивалентна нулю, т.е. находится в равновесии.
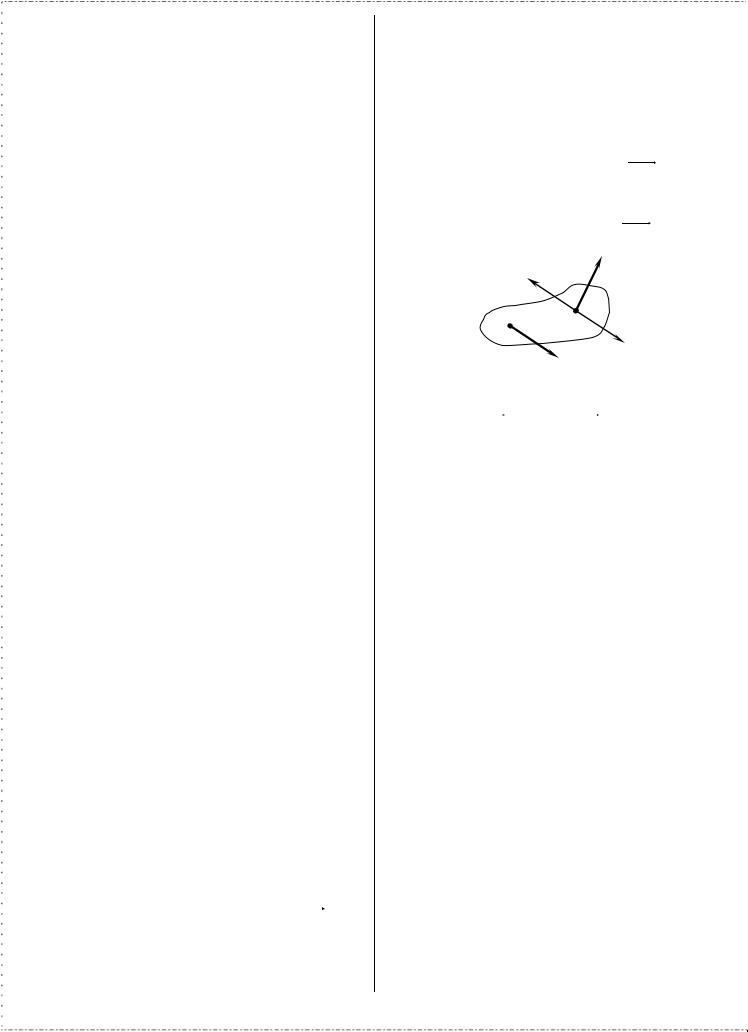
Теорема Вариньона. Если система сил имеет
равнодействующую, то момент этой равнодействующей относительно произвольного центра равен сумме моментов всех сил системы относительно того же центра.
Пусть некоторая система сил F1 , F2 ,..., Fn имеет
равнодействующую |
R , приложенную |
в |
точке |
C . |
Перенесем R в |
произвольную точку |
O . |
При |
этом |
|
r |
|
r |
|
добавится пара (R, R′′) с моментом Μ = momo (R) . |
|
|||
С другой стороны, Μ есть главный момент системы относительно центра O и равен сумме моментов всех сил
относительно этого центра, т.е. Μr = ∑momo (Fri ) .
|
R′′ |
|
Μo |
|
|
|
|
C |
|
O |
R′ |
|
|
|
R
Сравнивая между собой эти равенства, получаем теорему Вариньона
r |
r |
|
momo (R) = ∑momo (Fi ) . |
(7.11) |
|
Проектируя обе части равенства (7.11) на любую ось, проходящую через центр O , найдем, что теорема Вариньона справедлива и для моментов относительно оси.
Для заметок
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
2 апреля 2007 г. |