

termex / Theoretical_Mechanics_part_01_04
.pdfКинематика |
Краткий курс Теоретической Механики |
12 |
§4. Плоскопараллельное (плоское) движение АТТ
4.1.Основные понятия. Плоскопараллельным
движением АТТ называется такое его движение, при котором
все точки тела движутся параллельно какой-нибудь неподвижной плоскости π. При этом произвольная прямая
АВ, неизменно скрепленная с телом и перпендикулярная к основной плоскости π, будет двигаться поступательно, т.е. параллельно самой себе.
Следовательно, движение точек тела, лежащих на этой прямой, определяется движением одной из этих точек, а движение всего тела – движением параллельного основной плоскости π сечения S тела в плоскости этого сечения.
Таким образом, изучение плоского движения тела сводится к рассмотрению движения плоской неизменяемой фигуры (ПФ) в ее плоскости.
|
A |
A′ |
|
|
|
|
|
S |
|
B |
B′ |
π |
|
|
|
|
Неизменяемой будем называть такую плоскую фигуру, у которой расстояние между любыми двумя точками остается неизменным со временем (т.е. при движении).
Положение ПФ в ее плоскости однозначно определяется положением двух произвольных точек этой фигуры (положением отрезка прямой, соединяющего эти точки).
В дальнейшем мы будем рассматривать движение всей подвижной плоскости, неизменно связанной с движущейся фигурой, относительно неподвижной и параллельной ей основной плоскости π.
Основными видами движения ПФ в ее плоскости являются поступательное и вращательное движения.
Поступательным движением ПФ в ее плоскости будет такое движение, при котором любая прямая, взятая в плоскости фигуры, перемещается параллельно самой себе. Все точки ПФ при этом имеют равные скорости и ускорения и описывают конгруэнтные траектории.
Вращательным движением ПФ в ее плоскости будет такое движение, при котором одна точка, называемая центром вращения, остается неподвижной, а остальные точки фигуры движутся по концентрическим окружностям вокруг центра вращения.
При вращательном движении скорости и ускорения точек ПФ пропорциональны их расстояниям R до центра
вращения: v = ωR, w = R ε2 + ω4 , где ω и ε – угловая скорость и угловое ускорение вращения.
ε2 + ω4 , где ω и ε – угловая скорость и угловое ускорение вращения.
Ускорение точки ПФ при вращательном движении отклонено от радиуса вращения R на угол α, который одинаков для всех точек, поскольку wτ wn = tg(α) = ε ω2 .
Полюсом мы будем называть некоторую точку в плоскости движения ПФ, неизменно связанную с этой фигурой.
4.2. Геометрическая картина движения ПФ.
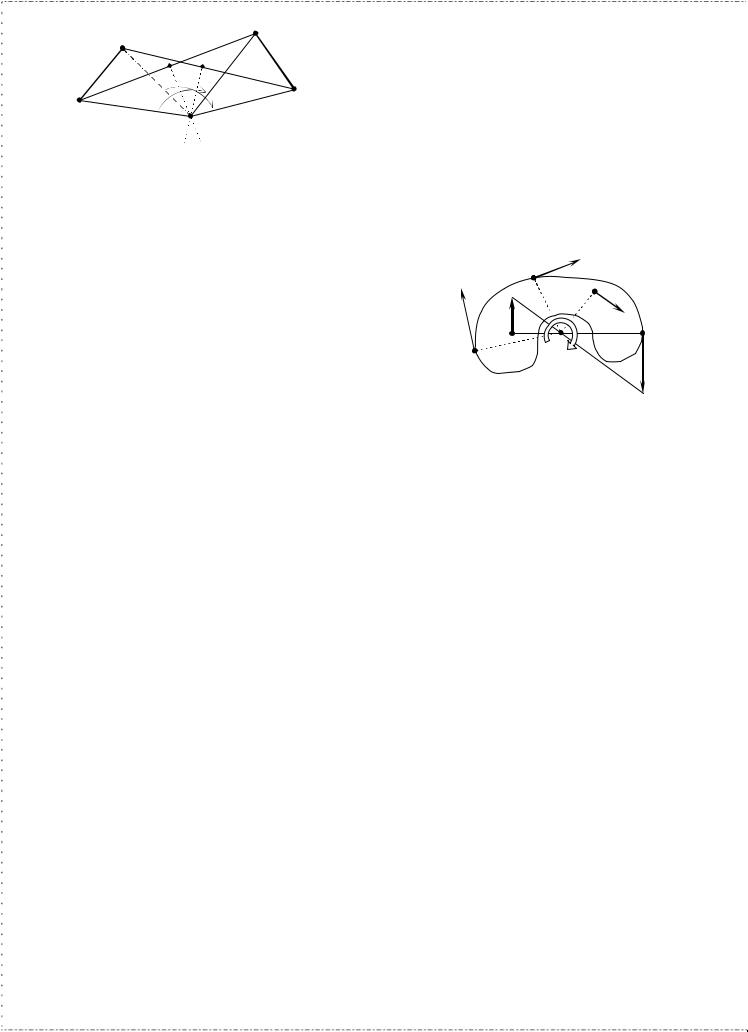
Теорема 1. Всякое перемещение плоской фигуры в ее плоскости может быть составлено из поступательного перемещения и поворота около произвольно выбранной точки (полюса). При этом поступательная часть перемещения зависит от выбора полюса, а вращательная часть – не зависит.
Пусть имеем два произвольных положения П1 и П2 плоской фигуры П , характеризуемые положениями А1В1
иА2В2 отрезка АВ, неизменно связанного с этой
фигурой. Выберем в качестве полюса точку A и поступательным перемещением фигуры П совместим
точки |
А1 и А2 . При этом отрезок АВ займет положение |
|
А2В2′ |
, причем А1В1 || |
А2В2′ . При повороте фигуры около |
центра |
А2 на угол ϕ |
отрезок А2В2′ займет положение |
А2В2 , а фигура П – требуемое положение П2 . |
||
|
|
B2′ |
|
B1 |
ϕ |
|
A2 |
|
ψ B2
A1
A2′
Если в качестве полюса взять другую точку – точку B , то из положения П1 в П2 фигура будет переведена
поступательным перемещением, определяемым вектором В1В2 и поворотом вокруг полюса B на угол ψ .
Очевидно, что А1 А2 ≠ В1В2 , т.е. поступательная часть перемещения с изменением полюса меняется.
Углы поворота ϕ и ψ равны, как накрест лежащие, а
направления поворотов совпадают. Следовательно, вращательная часть движения плоской фигуры от выбора полюса не зависит.
Поскольку поступательная часть перемещения ПФ с изменением полюса изменяется, оказывается возможным выбрать полюс так, чтобы эта часть перемещения вообще отсутствовала.
Теорема 2. Всякое непоступательное перемещение плоской фигуры в ее плоскости может быть выполнено одним поворотом фигуры около определенного центра, называемого центром конечного вращения.
Пусть имеем два произвольных положения П1 и П2 плоской фигуры П , характеризуемых положениями А1В1
иА2В2 отрезка АВ, неизменно связанного с этой
фигурой, причем, согласно условиям теоремы,
А1В1 |/| А2В2 .
Если центр конечного вращения существует, то он должен находиться в такой точке O , которая была бы равноудалена от А1 и А2 , а также от B1 и B2 , т.к.
должно быть OА1 = OA2 и OB1 = OB2 .
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
27 февраля 2007 г. |
Кинематика Краткий курс Теоретической Механики 13
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A2 |
|
|
|
|
Из доказанных теорем следует также, что поворот вокруг |
|||||||
|
|
|
|
B1 |
|
|
|
|
|
|
|
|
|
|
|
|
любого полюса или вокруг мгновенного центра происходит с |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
одной и той же для данного момента времени угловой |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
скоростью ω. Величина ω, не зависящая от выбора полюса, |
|||||||
|
|
|
|
|
|
ϕ |
|
|
|
ϕ |
|
|
|
B2 |
|
|
называется угловой скоростью фигуры в |
данный момент |
||||||||
|
|
A1 |
|
|
|
|
|
|
|
|
|
|
времени или мгновенной угловой скоростью. |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
4.3. Мгновенный центр вращения. Мгновенный центр |
|||||||
|
Следовательно, |
центр |
вращения |
должен |
находиться |
в |
вращения (МЦВ) получается как предельное положение |
|||||||||||||||||||
|
центра конечного вращения |
O , |
когда |
положение |
П |
|||||||||||||||||||||
точке |
пересечения |
перпендикуляров, |
восстановленных |
из |
|
|
|
|
|
|
2 |
|||||||||||||||
фигуры |
неограниченно приближается к |
П . Этот |
центр |
|||||||||||||||||||||||
середин отрезков A1 A2 и B1B2 . Докажем, |
что точка |
O |
|
|
|
|
|
1 |
|
|||||||||||||||||
представляет собой точку, элементарным поворотом вокруг |
||||||||||||||||||||||||||
действительно есть центр вращения. |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
которой плоская фигура перемещается из данного положения |
|||||||||||||||||||
|
Поскольку |
|
|
А1O = A2O , |
|
|
B1O = B2O |
|
и |
|||||||||||||||||
|
|
|
|
|
|
в бесконечно близкое, соседнее ему положение. |
|
|||||||||||||||||||
А1OA2 = B1OB2 , |
то |
при |
повороте |
фигуры |
на угол |
|
|
r |
|
|
|
|
||||||||||||||
А OA |
= ϕ отрезок |
|
|
совпадет с |
|
|
и фигура |
|
|
|
|
|
|
|||||||||||||
A B |
A B |
|
A |
vn−1 |
|
|
|
|||||||||||||||||||
|
1 |
2 |
|
|
|
|
|
|
1 1 |
|
|
|
|
2 2 |
|
|
|
|
n−1 |
A3 |
|
|
|
|
||
из положения П1 перейдет в положение П2 . |
|
|
|
|
|
v |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
Равенство |
углов |
А1OA2 = B1OB2 |
легко |
доказать |
|
r |
|
|
|
|
|
||||||||||||||
|
|
v2 |
|
r |
|
|
|
|||||||||||||||||||
следующими |
рассуждениями. |
Из |
|
равенства |
|
сторон |
|
A |
|
v3 |
|
An |
|
|||||||||||||
А1B1 = A2 B2 , |
|
OА1 = OA2 , |
|
OB1 = OB2 |
|
следует |
|
P |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
равенство |
треугольников |
A1B1O и |
A2B2O , |
откуда |
|
A1 |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
r |
|
||||||||||||||||||||
имеем равенство А OB |
= А OB . |
|
|
|
|
|
|
|
|
|
|
vn |
|
|||||||||||||
|
|
|
|
|
|
1 |
|
1 |
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Прибавив к обеим частям последнего равенства по углу |
|
|
|
|
|
|
|
||||||||||||||||||
B1OA2 , получим: А1OA2 = B1OB2 = |
ϕ. При этом |
Скорости всех точек A1,..., An плоской фигуры будут в |
||||||||||||||||||||||||
легко видеть, что угол |
|
ϕ равен углу между направлениями |
данный момент времени перпендикулярны к радиусам |
|||||||||||||||||||||||
отрезков |
A B |
и |
A B , |
т.е. |
остается таким же, |
как при |
вращения |
PAi , соединяющим мгновенный центр |
P с |
|||||||||||||||||
|
|
|
1 |
1 |
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
этими точками. |
|
|
|
|
|
|||
повороте вокруг любого полюса по теореме 1. |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
Доказанные теоремы дают представления о двух |
Скорость точки плоской фигуры, совпадающей с |
||||||||||||||||||||||||
возможных способах перемещения плоской фигуры из |
центром P , будет в данный момент равна нулю; эту точку |
|||||||||||||||||||||||||
одного ее фиксированного положения в другое, а также |
фигуры называют мгновенным центром скоростей. |
|
||||||||||||||||||||||||
раскрывают геометрическую картину движения плоской |
Зная положение мгновенного центра P , |
можно, найти в |
||||||||||||||||||||||||
фигуры в ее плоскости. |
|
|
|
|
|
|
|
|
|
|
|
данный момент времени направление скорости любой точки |
||||||||||||||
|
Всякое движение непрерывно и может рассматриваться |
ПФ. Так как перпендикуляры |
PAi |
к |
направлениям |
|||||||||||||||||||||
как |
|
непрерывная |
|
последовательность |
|
элементарных |
скоростей v всех точек плоской фигуры, |
восставленные из |
||||||||||||||||||
перемещений: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
этих точек, пересекаются в данный момент в центре |
P , то |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
• |
Согласно теореме 1 любое элементарное перемещение |
для определения положения мгновенного центра |
||||||||||||||||||||||||
|
можно |
|
получить |
|
путем |
|
бесконечно |
|
малого |
вращения надо знать направления скоростей каких- |
||||||||||||||||
|
поступательного перемещения вместе с произвольно |
нибудь двух точек фигуры. Восставив из этих точек |
||||||||||||||||||||||||
|
выбранным полюсом и поворота на бесконечно малый |
перпендикуляры к направлениям их скоростей, получим в |
||||||||||||||||||||||||
|
угол вокруг этого полюса. |
|
|
|
|
|
|
|
|
|
точке пересечения этих перпендикуляров мгновенный центр |
|||||||||||||||
|
Отсюда вытекает, что всякое движение плоской фигуры в |
вращения P . |
|
|
|
|
|
|||||||||||||||||||
ее плоскости можно рассматривать как совокупность |
Геометрическую картину движения плоской фигуры в ее |
|||||||||||||||||||||||||
плоскости можно еще представить с помощью так |
||||||||||||||||||||||||||
поступательного движения, определяемого движением |
||||||||||||||||||||||||||
произвольно |
выбранного |
полюса, |
|
и |
вращательного |
называемых центроид. При движении ПФ положение МЦВ |
||||||||||||||||||||
движения вокруг этого полюса; |
|
|
|
|
|
|
|
|
будет непрерывно изменяться как на неподвижной плоскости, |
|||||||||||||||||
|
|
|
|
|
|
|
|
так и на плоскости, неизменно связанной с движущейся |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
• |
Согласно |
|
теореме 2 |
любое |
непоступательное |
фигурой. |
|
|
|
|
|
|
||||||||||||||
|
элементарное перемещение фигуры можно осуществить |
Геометрическое место мгновенных центров вращения на |
||||||||||||||||||||||||
|
одним только поворотом на бесконечно малый угол |
неподвижной плоскости есть непрерывная кривая, которая |
||||||||||||||||||||||||
|
вокруг определенного центра, называемого мгновенным |
называется неподвижной центроидой. Геометрическое |
||||||||||||||||||||||||
|
центром вращения. |
|
|
|
|
|
|
|
|
|
|
|
место мгновенных центров вращения на подвижной |
|||||||||||||
|
Отсюда вытекает, что всякое непоступательное |
плоскости, неизменно связанной с движущейся ПФ, есть |
||||||||||||||||||||||||
движение плоской фигуры в ее плоскости можно |
также непрерывная кривая, называемая подвижной |
|||||||||||||||||||||||||
рассматривать |
как |
непрерывную |
|
последовательность |
центроидой. |
|
|
|
|
|
||||||||||||||||
бесконечно малых поворотов вокруг мгновенных центров |
В каждый момент времени обе центроиды будут касаться |
|||||||||||||||||||||||||
вращения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
друг друга в мгновенном центре вращения, соответствующем |
||||||||||
|
При этом положение мгновенного центра вращения |
этому моменту времени. |
|
|
|
|
|
|||||||||||||||||||
непрерывно изменяется как в неподвижной плоскости, |
После элементарного поворота ПФ вокруг данного |
|||||||||||||||||||||||||
так и в плоскости фигуры. |
|
|
|
|
|
|
|
|
|
мгновенного центра, подвижная центроида, повернувшись |
||||||||||||||||
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
|
27 февраля 2007 г. |
||||||||||||||||||||||||

Кинематика |
Краткий курс Теоретической Механики |
14 |
вместе с этой фигурой, соприкоснется с неподвижной центроидой в новой точке, которая будет мгновенным центром вращения для следующего момента времени и т.д.
Следовательно, при движении ПФ подвижная центроида катится по неподвижной центроиде без проскальзывания (точка касания, являющаяся МЦВ, имеет скорость, равную нулю). Так, например, если круг D , катится без скольжения по прямой Ox , то окружность этого круга будет подвижной
центроидой, а |
ось |
Ox |
– |
D |
||
неподвижной |
центроидой. |
|||||
|
||||||
Мгновенный центр вращения будет O |
x |
|||||
в точке P касания обеих центроид. |
|
|
P |
|||
4.4. Скорости |
точек |
плоской |
|
|||
фигуры. Пусть плоская фигура движется по отношению к основной системе отсчета Oxy , в которой положение
полюса A и произвольной точки M определяются соответственно радиус-векторами rM и rA .
y
A AM
rM
rA |
r |
|
rM |
O |
x |
|
Тогда в любой момент времени для векторов rA , rM и
rr = AM справедливо векторное равенство rM = rA + r ,
дифференцируя по времени обе части которого, будем иметь: rr&M = rr&A + rr& .
Но так как | AM |= const , то вектор r изменяется при
движении фигуры только по направлению. Следовательно, для него справедлива формула (3.15):
|
|
|
r |
r |
r |
|
|
|
|
|
|
r& |
= ω× r . |
|
|
|
|
||
Кроме того, rr& |
= vr |
, а rr& |
= vr |
, и мы получаем: |
|
||||
|
M |
M |
|
A |
|
A |
|
|
|
r |
r |
r |
|
|
|
vM = vA + vMA . |
(4.1) |
||
vM |
= vA + ω× AM или |
||||||||
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
vMA |
|
r |
|
|
|
|
|
|
|
|
|
vM |
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
A |
|
|
|
M |
|
r |
|
|
|
|
r |
|
|
|
|
|
vA |
|
|
|
vA |
|
|
|
|
|
|
|
Таким образом, вектор скорости vM данной точки M |
|||||||||
плоской фигуры есть сумма: |
вектора |
vA – скорости |
|||||||
произвольно выбранного полюса |
A , (общей для всех точек |
||||||||
фигуры); |
и скорости |
|
r |
|
r |
|
|
|
|
|
vMA |
= ω× AM , происходящей |
|||||||
вследствие вращения фигуры вокруг полюса A . |
|
||||||||
Вектор vMA направлен перпендикулярно вектору |
AM |
||||||||
в сторону |
вращения |
фигуры, |
а |
по |
модулю |
равен |
|||
vMA = ω AM .
Полученный результат позволяет найти скорость любой
точки фигуры, если известны скорость какой-нибудь одной r
ее точки A и угловая скорость фигуры ω. Другие способы определения скоростей точек плоской фигуры вытекают из рассматриваемых ниже теорем.
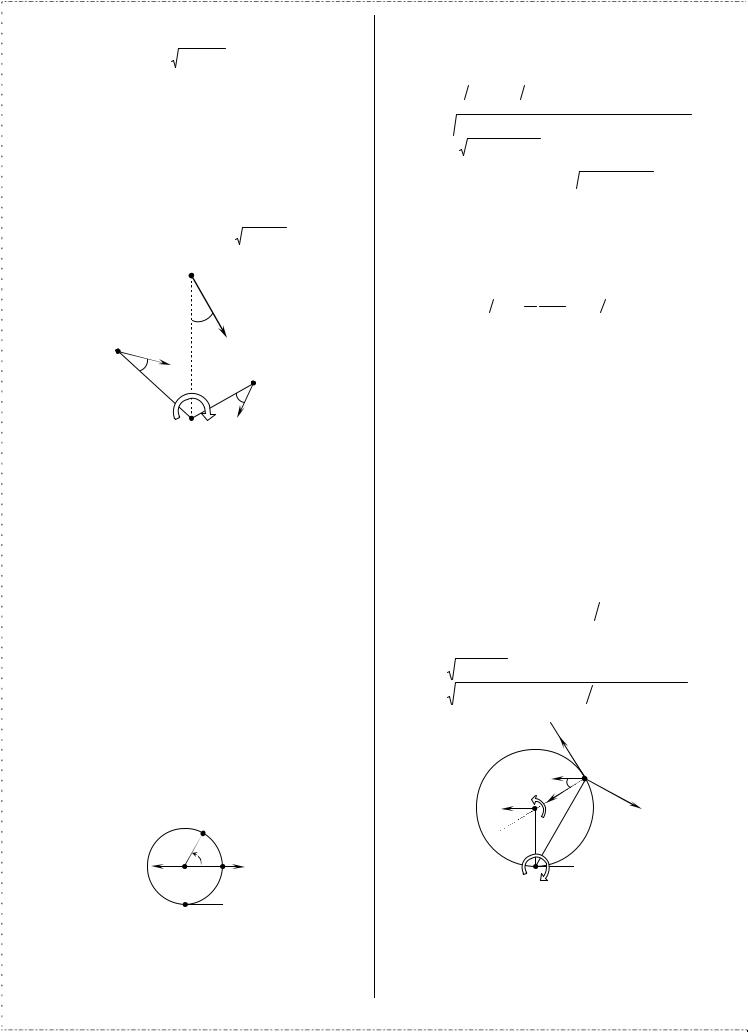
Теорема І. Если известны скорость какой-либо точки
фигуры и направление скорости другой ее точки, то можно определить скорость любой точки плоскости этой фигуры с помощью мгновенного центра вращения.
Пусть даны скорость точки A и направление скорости точки B . По известным направлениям скоростей в точках
Aи B строим мгновенный центр вращения P .
Тогда из равенства vA = ω PA находим мгновенную
угловую скорость вращения ПФ
ω = vA PA , |
(4.2) |
и скорость произвольной точки M фигуры в этот момент времени:
vM = vA |
PM |
и vrM PM . |
(4.3) |
|
|||
|
PA |
|
|
Ar
vA
M
r vM
ω
P
B
Равенство (4.3) показывает, что в каждый момент времени скорости всех точек плоской фигуры пропорциональны их расстояниям до мгновенного центра вращения.
Если направления заданных скоростей vA и vB будут
между собой параллельны, то доказанная теорема теряет силу. При этом может иметь место один из случаев:
а) vrA || vrB , но точки A и B не лежат на общем перпендикуляре к vA . В этом случае мгновенный центр P бесконечно удален от ПФ и равенство (4.2) дает ω = 0 .
Тогда из формулы (4.1) следует, что скорость любой точки M плоской фигуры vM = vA , т.е. имеет место
мгновенно-поступательное распределение скоростей.
|
M |
A |
|
|
|
|
|
B |
|
|
r |
|
vM |
vA |
б) vrA || vrB , а |
точки |
A и B лежат на общем |
перпендикуляре к |
AB . В этом случае перпендикуляры AP |
|
и BP к векторам vA и vB сливаются и для определения
положения точки P надо дополнительно знать модули обеих скоростей.
Тогда, согласно (4.3), будет vA AP = vB BP , и точка P найдется как пересечение прямой, соединяющей концы
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
27 февраля 2007 г. |

Кинематика |
Краткий курс Теоретической Механики |
15 |
векторов, изображающих скорости vA и vB , с прямой
AB . Следовательно, в случае б) для нахождения скорости vM любой точки M фигуры надо знать и модули, и
направления скоростей обеих точек A и B .
r
A vA
r
B vB
ω
P
Если, в частности, будет vA = vB , то опять имеет место
мгновенное поступательное распределение скоростей и для любой точки ПФ будет v = vA .
Теорема II. Проекции скоростей концов неизменяемого отрезка на его направление равны между собой.
Доказательство этой теоремы базируется на формуле (4.1). Умножим скалярно обе части этого равенства на
вектор |
AM . |
Тогда |
|
r |
= 0 , поскольку |
AM (ω× AM) |
|||||
r |
|
Сокращая на |
длину |
отрезка AM , |
|
AM (ω× AM) . |
|||||
окончательно получим |
|
|
|
||
|
vM cos(μ) = vA cos(α) , |
(4.4) |
|||
где α и |
μ углы, которые составляют векторы скоростей |
||||
vA и vM точек A и M с отрезком AM . |
|
||||
|
|
|
r |
|
|
|
|
|
vM |
r |
|
|
|
|
|
μ vMA |
|
|
|
|
ω |
|
|
|
A |
α |
M |
r |
|
|
|
|
|||
|
|
r |
|
vA |
|
vA
4.5.Ускорения точек ПФ. Дифференцируя обе части формулы (4.1) по времени, получим
|
|
|
r |
|
|
r |
|
|
|
|
r |
|
r |
r |
|
r |
|
|
|
|
|
|
dv |
M |
|
dv |
A |
|
|
|
dω |
|
|
dr |
|
|
|||
|
|
|
|
= |
|
|
+ |
|
|
×r |
+ ω× |
|
|
. |
(4.5) |
||||
|
|
|
|
|
dt |
|
dt |
dt |
|||||||||||
|
|
|
dt |
|
|
|
|
|
|
|
|
||||||||
Величина |
r& |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ω = ε есть вектор углового ускорения ПФ. |
|||||||||||||||||||
Этот |
вектор |
направлен |
перпендикулярно |
к плоскости |
|||||||||||||||
|
|
|
|
|
|
|
|
|
r |
|
|
r |
|
|
r |
& |
|||
фигуры также как и вектор ω. Причем ε ↑↑ ω, если |
ω > 0 , |
||||||||||||||||||
r |
r |
|
|
& |
|
|
|
|
|
|
|
|
|
что |
ω r и ω r = 0 , |
||||
и ε ↓↑ ω, если |
ω < 0 . Учитывая, |
||||||||||||||||||
преобразуем последнее слагаемое в (4.5): |
|
|
|
|
|||||||||||||||
|
r r |
r |
r r |
|
r r r |
|
r r r |
r |
. (4.6) |
||||||||||
|
ω×r& |
= ω× |
(ω×r) = ω |
(ω |
r) |
− r (ω ω) = −ω2r |
|||||||||||||
Введем обозначения |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
r |
r |
rвр |
, |
|
|
2 r |
r |
цс |
|
(4.7) |
||||||
|
|
|
ε ×r = wМА |
|
− ω |
r |
= wMA . |
|
|||||||||||
Векторы |
r |
и |
|
|
r |
|
|
представляют |
собой |
||||||||||
wвр |
|
wцс |
|
||||||||||||||||
|
|
|
|
МА |
|
|
|
|
|
MA |
|
|
|
|
|
|
|
||
вращательное и центростремительное ускорения точки
M по отношению к полюсу A , так если бы фигура совершала только вращение вокруг этого полюса.
Окончательно запишем:
r |
|
r |
|
r |
вр |
|
r |
цс |
|
w |
M |
= w |
A |
+ w |
MA |
+ w |
MA |
|
|
|
|
|
|
|
|||||
или |
wM = wA + wМА . |
(4.8) |
|||||||
|
|
wM |
|
|
|
|
r |
вр |
|
|
|
|
|
|
|
|
|
w |
MA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
w A |
|
|
|
|
wMA |
|
μ |
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
w A |
|
|
|
|
r |
цс |
|
|
|
|
|
|
|
wMA |
|
|
|||
A ω ε
Таким образом, полное ускорение любой точки плоской фигуры складывается геометрически из ускорения полюса
wA и ускорения wrМА = wrMAвр + wrMAцс , которое получает точка при вращении вокруг этого полюса.
Численно эти составляющие равны:
wМАвр = AM ε, wМАцс = AM ω2, |
(4.9) |
|
wМА = AM ε2 + ω4 . |
||
|
Угол μ, который составляет вектор ускорения wMA с
радиусом MA , определяется из равенства:
tg(μ) = wМАвр wМАцс = ε ω2 . |
(4.10) |
4.6. Мгновенный центр ускорений.
При непоступательном движении плоской фигуры в ее плоскости в каждый момент времени существует точка, ускорение которой в этот момент времени равно нулю. Эта точка называется мгновенным центром ускорений.
Рассмотрим алгоритм определения положения мгновенного центра ускорений по отношению к плоской фигуре (т.е. в плоскости движения этой фигуры).
|
r |
вр |
|
|
|
w |
QA |
r |
|
|
|
|||
|
|
|
|
|
r |
|
|
|
w A |
wQA |
μ |
|
|
Q |
|
|
|
|
|
|
r |
цс |
|
|
ε |
w |
QA |
|
|
|
|
|
||
|
|
|
|
|
A |
μ |
wr A |
|
|
Пусть нам известны ускорение wA точки A , а также угловая скорость ω и ускорение ε фигуры. Вычислим величину tg(μ) из равенства (4.10) и проведем под углом μ к вектору wA луч, который должен быть отклонен от wA в сторону вращения фигуры, если это вращение ускоренное
r |
r |
или против вращения, если |
оно замедленное |
( ε ↑↑ ω), |
|||
r |
r |
Отложим на луче отрезок AQ |
, равный |
( ε ↓↑ ω). |
|||
|
|
AQ = wA ε2 + ω4 . |
(4.11) |
Точка Q и будет мгновенным центром ускорений (МЦУ). Докажем последнее утверждение.
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
27 февраля 2007 г. |
Кинематика |
Краткий курс Теоретической Механики |
16 |
Так как |
r |
r |
r |
|
|
wQ = wA |
+ wQA , |
|
|
||
где |
w = AQ ε2 |
+ ω4 = w |
A |
, |
|
|
QA |
|
|
|
|
и вектор wrQ должен составлять угол μ с прямой AQ , то вектор wQA параллелен wA и направлен в противоположную сторону, т.е. wQA = −wA .
r r r
Поэтому wQ = wA + wQA = 0 .
Если же МЦУ принять в данный момент времени за полюс, то, так как wQ = 0 , будем иметь из (4.8):
r |
r |
и wM = MQ ε2 + ω4 . |
|
wM |
= wMQ |
||
|
|
B |
|
|
|
|
r |
|
|
|
wB |
|
|
|
μ |
|
A |
r |
|
|
|
w A |
|
|
|
μ |
M |
|
|
|
|
|
|
|
ε |
|
|
|
μ |
|
|
|
r |
|
|
Q |
wM |
Следовательно, ускорения всех точек ПФ пропорциональны в данный момент времени их расстояниям до МЦУ. Кроме того, углы, которые образуют векторы ускорений с отрезками, соединяющими их точки с МЦУ, одинаковы и равны μ.
Следует отметить, что мгновенный центр скоростей P и мгновенный центр ускорений Q – это разные точки. Так
для точки фигуры, совпадающей с МЦС по определению vP = 0 , но wP ≠ 0 . Для точки фигуры, совпадающей с
МЦУ по определению wP = 0 , однако vP ≠ 0 .
Если же плоская фигура совершает чисто вращательное движение (около неподвижного центра O ), то мгновенный центр скоростей и мгновенный центр ускорений совпадают с неподвижным центром O вращения фигуры.
Теоретический пример.
Пусть круг, радиус которого равен R , катится без скольжения по прямолинейному рельсу. При этом его центр
C имеет в данный момент |
времени скорость vC и |
||||
ускорение wC , изображенные на рисунке. |
|||||
|
|
|
|
M |
|
|
|
|
|
φ A |
|
|
r |
|
C |
r |
|
|
|||||
|
wC |
|
vC |
||
|
|
|
|
|
|
P
Найти скорость и ускорение произвольной точки M обода колеса, положение которой определяется углом φ ,
отсчитываемом от радиуса CA .
Решение. Поскольку точка P касания круга и рельса есть МЦС, то выбирая эту точку в качестве полюса, воспользуемся для определения скорости точки M
формулами (4.2) и (4.3):
ω = vC CP = vC R – угловая скорость колеса,
PM =  CP2 + CM2 − 2 CP CM cos(90o + φ) = = R 2 (1 + sin φ),
CP2 + CM2 − 2 CP CM cos(90o + φ) = = R 2 (1 + sin φ),
vM = PM ω = vc  2 (1 + sin φ) .
2 (1 + sin φ) .
Вектор скорости vM направим перпендикулярно отрезку PM в сторону мгновенного вращения ω круга вокруг своего МЦС.
Поскольку в любой момент времени R = const , то дифференцируя по времени формулу для угловой скорости
получим: |
ε = dω dt = 1 dvC = w R . |
||
|
R |
dt |
C |
|
|
||
Поскольку центр круга C движется прямолинейно, а его скорость vC и ускорение wC направлены в
противоположные стороны, то мгновенное вращение круга вокруг МЦС является замедленным. Поэтому направления ω и ε также будут противоположными.
Для определения ускорения точки M воспользуемся формулами (4.8)–(4.9):
wMCвр = ε R = wC , wMCцс = ω2 R = vC2  R .
R .
После того как по правилу (4.8) векторы wC , wrMCвр и
построены в точке M , спроектируем это векторное равенство на направления (1) и (2), что соответствуют направлениям векторов wrMCвр и wrMCцс :
|
|
w = wвр |
+ w |
C |
sin φ = w |
|
(1 + sin φ), |
|||||||||
|
|
1 |
MC |
|
|
|
|
C |
|
|
|
|
||||
|
|
w |
= wцс |
+ w |
C |
cos φ = v2 |
|
R + w |
|
cos φ. |
||||||
|
|
2 |
MC |
|
|
|
|
C |
|
|
|
C |
||||
Тогда, поскольку w1 w2 , получим окончательно: |
||||||||||||||||
w |
M |
= |
w2 |
+ w2 = |
|
|
|
|
|
|
|
|
|
|
||
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
= |
w2 |
(1 + sin φ)2 + [v2 |
R + w |
|
cos φ]2 |
|||||||||
|
|
|
C |
|
|
|
|
|
C |
|
|
C |
|
|||
|
|
|
|
|
|
|
|
(1) |
r |
вр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w |
MC |
|
|
|
|
||
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
wC |
|
M |
r |
|
|
|||
|
|
|
|
|
|
|
|
φ |
|
|
|
|
|
|
|
|
|
|
|
|
wC |
|
|
|
|
|
|
|
vM |
|
|
||
|
|
|
|
|
|
r |
цс |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
C |
w |
MC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε |
|
|
|
|
|
|
|
||
|
|
|
|
|
(2) |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
ω |
|
|
|
|
|
|
|
Для заметок |
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
27 февраля 2007 г. |