

termex / Theoretical_Mechanics_part_01_01
.pdfКинематика |
Краткий курс Теоретической Механики |
1 |
§ 1. Введение в кинематику
1.1. Основные понятия. Кинематика есть раздел теоретической механики, посвященный изучению движения тел с геометрической точки зрения, без учета причин, вызывающих изменение этого движения. От геометрии кинематика отличается лишь тем, что при рассмотрении перемещений тел в пространстве принимается во внимание еще и время этих перемещений.
В механике Ньютона метрические свойства пространства считаются не зависящими от движущейся в нем материи, и оно рассматривается как трехмерное евклидово пространство, однородное и изотропное по всем направлениям. Время в механике Ньютона также считается не связанным с движущейся материей, т.е. абсолютным. Время изменяется одинаково во всех точках абсолютного пространства; на любых телах, как угодно движущихся в этом пространстве друг относительно друга.
Трехмерное евклидово пространство и абсолютное время отражают реальные свойства пространства и времени приближенно, однако это приближение дает достаточную для инженерной практики точность при изучении движений со скоростями, малыми по сравнению со скоростью света.
Всякое тело, движение которого изучается в механике, мы можем мыслить состоящим из очень большого числа материальных частиц ничтожно малых размеров, характер связей между которыми определяется свойствами данного тела. Эти частицы называют материальными точками. Таким образом, любое тело представляет собой систему материальных точек. В кинематике масса материальной точки во внимание не принимается и поэтому материальная точка рассматривается как точка геометрическая.
Множество материальных частиц будет образовывать
систему материальных точек тогда, когда положение и движение каждой точки этого множества по отношению к этому множеству будет зависеть от положения и движения остальных частиц множества.
Неизменяемой системой называется такая система материальных точек, в которой расстояние между двумя любыми точками неизменно со временем. Неизменяемая система материальных частиц непрерывным образом занимающая объем пространства дает идеальный образ
абсолютно твердого тела (АТТ). Распределение массы тела по его объему характеризуется плотностью. Плотностью тела мы будем называть количество вещества, содержащееся в единице объема этого тела. Для однородных тел плотность является постоянной величиной по всему объему тела.
Положение тела в пространстве может быть определено только относительно произвольно выбранного другого неизменяемого тела, называемого телом или системой отсчета. Для количественного определения положения рассматриваемого объекта с телом отсчета неподвижно связывают какую-нибудь систему координат. Экспериментально перемещение всякого тела устанавливается именно относительно тел отсчета. Полное отсутствие практической возможности установить какоелибо абсолютное (т.е. «неподвижное») тело отсчета приводит к необходимости пользоваться относительными системами отсчета. В каждом конкретном случае движение должно рассматриваться по отношению к определенной системе отсчета, которую называют основной.
Если положение тела относительно выбранной системы отсчета со временем не изменяется, то мы будем говорить, что это тело покоится относительно данной системы отсчета. Если же тело изменяет свое положение относительно выбранной системы отсчета, то будем говорить, что это тело движется относительно данной системы отсчета.
Таким образом, понятия «движение» и «покой» являются относительными и имеют смысл только тогда, когда указана система отсчета, относительно которой рассматривается положение тела. Более того, одно и то же движение носит совершенно различный характер, смотря по тому, к какой системе отсчета это движение будет отнесено.
Движение по существу непрерывно. Поэтому точки пространства, в которых последовательно находится любая движущаяся точка, представляют собой непрерывное многообразие одного измерения – непрерывную кривую,
которую называют траекторией точки.
Движение тела по отношению к выбранной системе отсчета будет известно, если можно определить его положение относительно этой системы отсчета в любой момент времени. Положение точки или тела относительно данной системы отсчета определяется координатами, а ее движение – уравнениями, выражающими эти координаты как функции времени (законы движения).
Основная задача кинематики состоит в том, чтобы по уравнениям, определяющим закон движения данной системы точек (или тела), найти все кинематические характеристики этого движения (траектории разных точек, их скорости, ускорения и проч.). Движение любой системы точек относительно данной системы отсчета известно, если известно движение каждой точки относительно этой же системы отсчета. Следовательно, изучению движения системы точек должно предшествовать изучение движения точки.
1.2. Способы описания движения точки. Определить
(описать) движение точки – означает определить (описать) ее положение относительно выбранной системы отсчета в любой момент времени. Это можно сделать одним из следующих способов.
Естественный способ описания движения точки требует задания ее траектории относительно выбранной системы отсчета Oxyz . На траектории следует указать
начало M0 и положительное направление отсчета расстояний s = M0M , где s – расстояние от начала отсчета M0 до точки M , измеренное вдоль дуги
траектории и взятое с соответствующим знаком. Положению M0 необходимо поставить в соответствие
начальный момент времени t0 , например t0 = 0 .
z (+)
M
 M0 (−)
M0 (−)
O
y
x
Движение точки будет определено, если для каждого момента времени t > t0 будет известна величина s ,
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
25 февраля 2007 г. |
Кинематика |
Краткий курс Теоретической Механики |
2 |
указывающая положение точки на ее траектории, т.е. если будет задана зависимость
s = f(t) . |
(1.1) |
Равенство (1.1) называется законом движения или уравнением движения точки. По самой природе движения функция f(t) должна быть: однозначной, поскольку в один
и тот же момент времени движущаяся точка не может находиться в двух различных точках пространства; непрерывной, поскольку движение непрерывно и каждому бесконечно малому изменению t соответствует бесконечно
малое изменение s ; дифференцируемой, |
т.е. должна |
допускать производную. |
|
Если s = const на промежутке времени |
t , то это |
означает, что точка на этом промежутке времени относительно данной системы отсчета находится в покое.
Координатный способ описания движения точки состоит в том, что задаются: какая-либо система координат, связанная с телом отсчета; координаты движущейся точки, как функции времени. Чаще всего для определения положения точки используется прямоугольная декартовая система координат Oxyz .
В декартовой системе движение точки задается в виде
x = x(t), y = y(t), z = z(t). |
(1.2) |
Каждое из трех уравнений (1.2), взятое отдельно, определяет закон движения проекции точки на соответствующую ось, а все вместе – позволяют в каждый момент времени t определить положение точки M по отношению к системе Oxyz . Уравнения (1.2) также
являются параметрическими уравнениями траектории точки, в которых параметром является время t .
В случае плоского движения, т.е. когда траектория точки есть плоская кривая, закон движения точки относительно какой-либо системы координат, расположенной в плоскости движения, выразится только двумя уравнениями. Например, когда точка движется в плоскости Oxy , законами движения
могут быть:
*x = x(t), y = y(t) – для декартовых осей;
*r = r(t), ϕ = ϕ(t) – в полярной системе координат.
Исключая время t в последних системах уравнений, получим уравнения траектории плоского движения в декартовых координатах F(x,y) = 0 или полярных
координатах Φ(r,ϕ) = 0 .
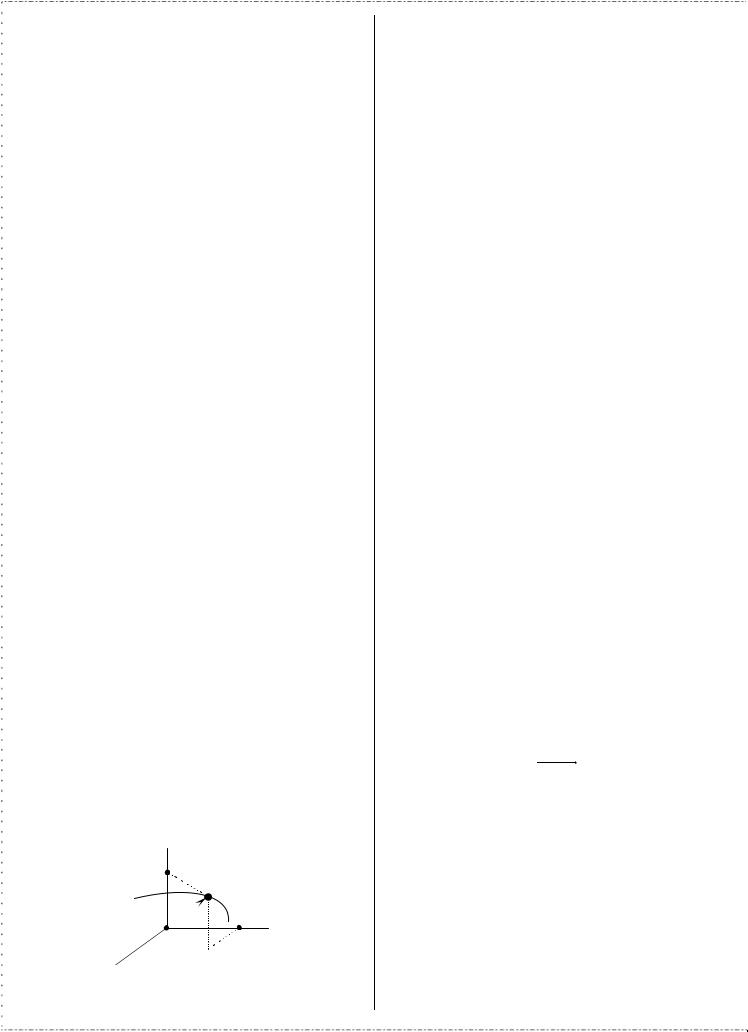
Векторный способ описания движения точки основан на задании ее положения при помощи радиус-вектора r , проведенного из начала O выбранной системы ориентировки Oxyz к движущейся точке M .
z
zM
M
r
r
O yM
y
xM x
x
Очевидно, что при движении точки M в пространстве ее радиус-вектор r будет изменяться с течением времени как по направлению, так и по величине. Следовательно, в векторной форме закон движения точки представим в виде
rr = rr(t) = x(t) i + y(t) j + z(t) k .
Траекторией точки M при векторном способе описании движения будет годограф радиус-вектора r .
В частности, векторным законом движения точки на координатной плоскости Oxy будет
rr(t) = x(t) i + y(t) j .
В зависимости от вида траектории точки ее движение может быть прямолинейным или криволинейным, причем свойства траектории зависят от выбора системы отсчета. Так движение, прямолинейное относительно одной системы отсчета, может быть криволинейным относительно другой, и наоборот.
1.3. Закон прямолинейного движения.
Прямолинейным называется такое движение точки, при котором ее траектория относительно выбранной системы отсчета есть прямая линия.
Положение точки M на прямой определяется координатой x , которая представляет собой расстояние от движущейся точки до произвольно выбранного начала O , и берется с положительным или отрицательным знаком в
зависимости |
от |
направления |
отрезка OM . |
Величина |
OM = x |
есть |
величина |
алгебраическая. |
Закон |
прямолинейного движения выражается уравнением |
||||
|
|
x = f(t) . |
(1.3) |
|
Если x по абсолютной величине возрастает, то точка
Mудаляется от начала O и движение называется прямым,
впротивном случае – возвратным.
Если x = f(t) за все время движения на некотором
интервале времени только убывает или только возрастает, то прямолинейное движение на этом интервале называется
монотонным.
Если x от времени не зависит, то точка M не изменяет своего расстояния от начала O и, следовательно, находится в покое относительно данной системы отсчета.
Пусть точка M движется по прямой Ox , и в момент времени t1 находится в положении M1 , а в момент t2 – в
положении M2 . Вектор M1M2 , соединяющий начальное
и конечное положения точки называется перемещением точки M за промежуток времени t2 − t1 .
Необходимо различать между собой понятия «перемещение» и «путь»: точка M может пройти из положения M1 в положение M2 , пройдя при этом разные
пути, тогда как перемещение ее будет одно и то же.
В случае прямолинейного движения векторы перемещений точек будут коллинеарными, и мы можем их рассматривать как алгебраические величины. Понятия «перемещение» и «путь» совпадают только для прямолинейного и монотонного движения точки.
1.4. Скорость и ускорение в прямолинейном движении. Пусть точка движется по прямой Ox , и в
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
25 февраля 2007 г. |
Кинематика |
Краткий курс Теоретической Механики |
3 |
момент времени t положение точки определяется координатой x , а в момент t′ – координатой x′. Тогда за промежуток времени t = t′ −t точка совершает перемещение x = x′ − x . Отношение перемещения точки к соответствующему промежутку времени
v |
= |
x′ − x |
= |
x |
(1.4) |
|
|
||||
* |
t′ −t |
t |
|
||
|
|
|
|||
называется средней скоростью движения точки за этот промежуток времени. В пределе при t → 0 средняя скорость дает величину, называемую скоростью точки в данный момент времени
v = |
x |
|
dx |
′ |
|
|
lim |
= |
|
= f (t) . |
(1.5) |
||
dt |
||||||
|
t→0 t |
|
|
|
Таким образом, для прямолинейного движения скорость точки в данный момент времени равна первой производной от расстояния по времени. Единицами измерения скорости служат: см/сек , м/сек , км/час.
Очевидно, что если на данном участке пути скорость v и координата x имеют одинаковые знаки, то точка удаляется от начала O и ее движение на этом участке является прямым. Если же они имеют разные знаки, то точка приближается к началу O и ее движение будет
возвратным.
Скорость точки может обращаться в нуль в двух случаях:
• Если v = dx dt = 0 в какой-либо момент времени, то x
dt = 0 в какой-либо момент времени, то x
вэтот момент имеет стационарное значение. При этом если
xимеет максимум или минимум, то скорость v , проходя через нуль, меняет знак и происходит изменение движения с прямого на возвратное или наоборот.
• Если v = 0 в течение какого-то промежутка времени, то в течение этого промежутка x = const и точка находится в покое.
Если v = v0 = const , т.е. если скорость точки постоянна, то движение называется равномерным.
Интегрируя выражение dx = v0dt , получим |
закон |
равномерного прямолинейного движения точки |
|
x(t) = x0 + v0t , |
(1.6) |
где постоянная величина x0 представляет |
собой |
координату точки (начальное расстояние до точки O ) в начальный момент времени t = 0 .
В общем случае скорость прямолинейного движения является функцией времени. Пусть в момент времени t точка имеет скорость v , а в момент t′ – скорость v′; тогда отношение приращения скорости к соответствующему промежутку времени
w |
= |
v′ − v |
= |
v |
(1.7) |
|
|
||||
* |
|
t′ −t |
t |
|
|
|
|
|
|||
называется средним ускорением точки за этот промежуток времени, которое в пределе при t → 0 становится величиной
w = lim |
v = |
dv |
= |
d2x |
, |
(1.8) |
|
|
|||||
t→0 |
t dt dt2 |
|
|
|||
называемой ускорением точки в данный момент времени.
Таким образом, для прямолинейного движения точки ускорение в данный момент времени есть первая производная от скорости или вторая производная от расстояния по времени. Единицами измерения ускорения обычно служат см/сек2 или м/сек2.
Движение, ускорение которого постоянно, носит название равнопеременного. Пусть w = a = const , тогда из dv = a dt , интегрируя, получим
v(t) = v0 + a t , |
(1.9) |
где постоянная v0 есть начальная скорость точки (в момент
времени t = 0 ). Интегрируя |
(1.9), найдем |
закон |
||
прямолинейного равнопеременного движения точки |
|
|||
x(t) = x |
+ v t + |
at2 |
|
|
|
. |
(1.10) |
||
|
||||
0 |
0 |
2 |
|
|
|
|
|
|
|
Если скорость по абсолютной величине возрастает, то движение называется ускоренным, а если убывает, то –
замедленным.
При v > 0 движение будет:
ускоренным, если dv = w > 0 , dt
и замедленным, если dv = w < 0 ; dt
а при v < 0 – наоборот.
Следовательно, если ускорение будет иметь тот же
знак, что и скорость, то движение будет ускоренным, а если противоположный знак, то замедленным (верно только для прямолинейного движения точки).
Скорость и ускорение, как известно, являются величинами векторными. Но в случае прямолинейного движения эти векторы направлены вдоль траектории (коллинеарные векторы) и, кроме модулей, отличаются лишь знаками, поэтому они рассматриваются как величины алгебраические.
Для заметок
___________________________________________________
___________________________________________________
___________________________________________________
___________________________________________________
___________________________________________________
___________________________________________________
___________________________________________________
___________________________________________________
___________________________________________________
___________________________________________________
___________________________________________________
___________________________________________________
___________________________________________________
___________________________________________________
___________________________________________________
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
25 февраля 2007 г. |