

termex / Theoretical_Mechanics_part_01_06
.pdfКинематика |
Краткий курс Теоретической Механики |
19 |
§ 6. Сложные движения твердого тела
6.1. Общая постановка задачи.
Будем рассматривать твердое тело, движущееся относительно системы отсчета Oxyz , которая в свою
очередь перемещается некоторым образом по отношению к неподвижной системе Oξηζ .
Пусть v1 |
есть скорость точки |
M тела в его движении |
|||
относительно |
подвижных |
осей |
Oxyz |
(относительная |
|
скорость), а v2 – скорость той |
неизменно связанной |
с |
|||
подвижной системой Oxyz точки пространства M′, |
с |
||||
которой в данный момент |
времени совпадает точка M |
||||
(переносная скорость). |
|
|
|
|
|
Если относительное и переносное движения тела |
|||||
известны, то абсолютная скорость точки |
M будет равна |
||||
геометрической сумме |
|
|
|
|
|
|
vM = v1 + v2 . |
(6.1) |
|||
Рассмотрим следующую задачу: пусть в данный момент времени известны относительное и переносное движения АТТ, необходимо установить вид результирующего (сложного) движения тела, которому соответствует распределение абсолютных скоростей точек тела в этот момент времени.
Поскольку задача ставится для данного момента времени, можно говорить о решении проблемы сложения n мгновенных поступательных и вращательных движений абсолютно твердого тела.
Из равенства (6.1) вытекает, что слагаемые движения кинематически коммутативны в том смысле, что мгновенное распределение скоростей результирующего движения не изменится, если относительное и переносное движения поменять ролями.
6.2. Сложение поступательных скоростей.
Пусть все составные движения АТТ являются поступательными, тогда, в отличие от всех последующих случаев, теорема о сложении скоростей формулируется и доказывается одинаково как для мгновенных, так и для конечных перемещений.
Пусть АТТ движется поступательно со скоростью v1 относительно системы Oxyz , которая в свою очередь движется поступательно со скоростью v2 относительно неподвижной системы Oξηζ .
Тогда абсолютная скорость каждой точки тела есть сумма относительной скорости, которая для всех точек тела равна v1 , и переносной скорости, которая в этом случае для
любой точки АТТ равна v2 . Поэтому абсолютные скорости
всех точек тела выражаются одним и тем же вектором |
|
v = v1 + v2 , |
(6.2) |
а результирующее движение АТТ будет поступательным. Если тело участвует одновременно в n поступательных
движениях со скоростями v1, v2,K, vn , то результирующее
его движение будет также поступательным с абсолютной скоростью
v = v1 + v2 + K + vn .
6.3. Сложение мгновенных угловых скоростей.
Пусть АТТ совершает мгновенное вращение с угловой скоростью ω1 относительно системы Oxyz , которая, в
свою очередь, совершает также мгновенное вращение с угловой скоростью ω2 по отношению к неподвижной
системе Oξηζ.
Рассмотрим частный случай, когда мгновенные угловые скорости пересекаются в одной точке О.
Построим на векторах ω1 и ω2 параллелограмм.
Тогда скорость точки |
A (точка конца диагонали этого |
||||
параллелограмма) будет равна |
|
||||
r |
r |
× OA |
r |
× OA = 0 . |
|
vA |
= ω1 |
+ ω2 |
|||
|
v |
|
|
|
A |
|
|
r |
|
vM |
|
|
ω |
|
|
||
|
1 |
|
Ω |
|
|
|
|
|
|
|
|
M
r
O ωv2
Модули обоих слагаемых равны, т.к. они равны удвоенным площадям равных треугольников, составляющих параллелограмм.
По направлениям же эти слагаемые противоположны, а поэтому скорость точки A равна нулю. Следовательно прямая, проходящая через точки O и A является мгновенной осью вращения результирующего движения, которое также является мгновенным вращением с угловой скоростью
|
|
|
r |
r |
|
(6.3) |
|
|
|
Ω =ω1 |
+ω2 . |
|
|
Тогда |
скорость |
произвольной точки |
M данного тела |
|||
будет равна |
|
|
r |
|
|
|
|
r |
r |
r |
|
(6.4) |
|
|
vM = ω1 |
× OM + ω2 × OM = Ω × OM . |
||||
Если |
АТТ одновременно |
участвует |
в n мгновенных |
|||
вращениях с угловыми скоростями ω1, ω2,K, ωn |
вокруг |
|||||
осей, пересекающихся в одной точке O , то результирующее движение будет также мгновенным вращением вокруг оси, проходящей через точку O , с угловой скоростью
r |
r |
r |
(6.5) |
Ω = ω1 |
+ ω2 |
+K+ ωn . |
Рассмотрим теперь случай, когда мгновенные угловые скорости параллельны и направлены в одну сторону.
Очевидно, что это будет случай плоскопараллельного движения АТТ в плоскости, перпендикулярной к мгновенным угловым скоростям.
Пусть плоскость движения АТТ пересекает плоскость осей ω1 и ω2 по прямой AB . Скорости, которые получает
от мгновенных вращений с угловыми скоростями ω1 и ω2
некоторая точка M , лежащая на отрезке AB , будут противоположны по направлению, а по величине эти скорости будут равны ω1 AM и ω2 BM .
Следовательно, одна из точек отрезка AB , а именно C , для которой будет справедливо равенство
ω |
AC = ω |
2 |
BC или |
AC |
= ω2 |
(6.6) |
|
||||||
1 |
|
|
BC |
ω1 |
|
|
|
|
|
|
|
имеет скорость, равную нулю, т.е. vC = 0 .
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
23 марта 2007 г. |

Кинематика |
Краткий курс Теоретической Механики |
20 |
Такую же скорость будут иметь все точки, лежащие на прямой, проходящей через точку C и параллельной мгновенным осям вращений.
Поэтому эта прямая будет мгновенной осью вращения для результирующего движения
r
Ω
ωv1 ωv2
M
A C B
Для определения мгновенной угловой скорости Ω результирующего движения рассмотрим скорость точки B .
Имеем vB = ω1 AB + ω2 0 = ω1 AB ,
но с другой стороны
vB = Ω CB , откуда |
|
Ω CB = ω1 AB . |
|||||||||
Используя (6.6), окончательно имеем |
|
|
|||||||||
Ω = ω |
|
AB |
= ω |
AC + CB |
= |
|
|
||||
|
|
|
|
|
|
||||||
1 |
|
CB |
1 |
CB |
|
(6.7) |
|||||
|
AC |
|
|
|
ω |
|
|||||
|
|
|
|||||||||
= ω |
|
|
+ 1 |
= ω |
|
2 + |
1 |
= ω + ω . |
|||
|
|||||||||||
1 |
CB |
|
1 |
|
ω1 |
|
2 1 |
||||
|
|
|
|
|
|||||||
Итак, результирующее движение есть мгновенное вращение с угловой скоростью Ω = ω1 + ω2 . Мгновенная
угловая скорость (ось вращения) расположена в плоскости мгновенных угловых скоростей ω1 и ω2 слагаемых
движений, параллельна им, направлена в ту же сторону и делит расстояние между ними внутренним образом на части, обратно пропорциональные величинам ω1 и ω2 .
Пусть теперь мгновенные угловые скорости антипараллельны, т.е. векторы ω1 и ω2 параллельны, но
направлены в противоположные стороны.
Построим плоскость движения АТТ, перпендикулярную к обеим мгновенным осям, и прямую AB , по которой плоскость движения пересекается с плоскостью осей.
ωv1
r
Ω
M B
C A
ωv2
Пусть ω1 ≠ ω2 и ω1 > ω2 . Для любой точки M , лежащей на продолжении отрезка AB за большей мгновенной угловой скоростью ω1 , скорости,
происходящие от мгновенных вращений с угловыми скоростями ω1 и ω2 противоположны по направлению, а
по величине равны ω1 AM и ω2 BM .
Тогда одна из этих точек, а именно C , для которой
ω |
CA = ω CB или |
CA |
= ω2 |
(6.8) |
|
||||
1 |
2 |
CB |
ω1 |
|
|
|
|
имеет скорость, равную нулю, т.е. vrC = 0 .
Следовательно, прямая, параллельная ω1 и ω2 , и
проходящая через C , есть мгновенная ось вращения для результирующего движения.
Для точки B имеем
vB = ω1 AB = Ω CB ,
где Ω – мгновенная результирующая угловая скорость. Отсюда вытекает
Ω = ω |
|
AB |
|
= ω |
|
CB − CA |
= |
|
|
|
|
|||
|
CB |
|
|
|
|
|
||||||||
1 |
|
|
|
1 CB |
|
|
|
|
|
(6.9) |
||||
|
|
|
CA |
|
|
|
|
ω |
|
|
|
|||
|
|
|
|
|
|
|
|
|||||||
= ω |
1 − |
|
|
|
= ω |
1 |
− |
2 |
|
= ω − ω . |
||||
|
|
|||||||||||||
1 |
|
|
CB |
1 |
|
|
ω1 |
|
|
1 |
2 |
|||
|
|
|
|
|
|
|
|
|
|
|||||
Таким образом, |
когда |
ω1 ≠ ω2 |
и |
ω1 > ω2 , |
||||||||||
результирующее движение есть мгновенное вращение с угловой скоростью, численно равной Ω = ω1 − ω2 .
Вектор мгновенной угловой скорости |
Ω расположен в |
|
плоскости угловых скоростей ω1 и |
ω2 |
слагаемых |
движений, параллелен им, направлен в сторону большей скорости ω1 и делит расстояние между векторами ω1 и ω2
внешним образом на части, обратно пропорциональные модулям ω1 и ω2 .
6.4. Пара вращений.
Совокупность двух мгновенных вращений вокруг параллельных осей с одинаковыми по модулю и противоположными по направлению угловыми скоростями образует пару мгновенных вращений или, как говорят для краткости, пару вращений.
Угловые скорости ω1 и ω2 этих вращений, удовлетворяющие соотношениям
ω1 = −ω2 и |
ω1 = ω2 = ω, |
(6.10) |
||
составляют пару мгновенных угловых скоростей. |
|
|||
|
|
|
ω1 |
|
|
d |
|
|
|
|
|
P |
|
|
|
|
|
||
|
|
|
M |
|
Q |
|
|
|
|
ω2 |
r |
r |
|
|
|
|
v |
= ω1 × PQ |
|
Формулы (6.9) и (6.8) показывают, что в случае антипараллельных угловых скоростей в пределе при ω2 → ω1 результирующая угловая скорость Ω стремится
к нулю, а мгновенная ось результирующего движения уходит вместе с точкой C на бесконечность, так как в пределе AC → BC .
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
23 марта 2007 г. |

Кинематика |
Краткий курс Теоретической Механики |
21 |
Отсюда можно заключить, что результирующее движение дает мгновенное поступательное движение или, иначе, что пара мгновенных угловых скоростей эквивалентна поступательной скорости.
Действительно, обозначая через P и Q какие-нибудь
две точки, взятые на мгновенных осях вращения, будем для любой точки M тела иметь:
r |
|
r |
|
r |
r |
r |
v |
M |
= ω × PM |
+ ω × QM = ω × PM − ω × QM = |
|||
|
1 |
r |
2 |
1 r |
1 |
|
|
|
|
= ω1 |
× (PM − QM) = ω1 |
× PQ. |
|
Итак, скорости всех точек тела в данный момент времени равны друг другу, следовательно, пара мгновенных угловых скоростей (ω1, ω2 ) действительно
эквивалентна поступательной скорости
|
|
r |
r |
× PQ . |
(6.11) |
|
|
|
vM |
= ω1 |
|||
При этом скорость v результирующего поступательного |
||||||
движения перпендикулярна к плоскости пары |
(ω1, ω2 ) и |
|||||
направлена так, что наблюдатель, смотрящий с конца |
v , |
|||||
видит векторы |
|
пары |
(ω1, ω2 ) указывающими |
на |
||
«вращение» против хода стрелки часов. |
|
|
||||
Расстояние |
d |
между |
мгновенными |
угловыми |
||
скоростями (ω1, ω2 ) называется плечом пары.
Модуль v численно равен площади параллелограмма, построенного на векторах (ω1, ω2 ) , т. е.
(6.12)
Вектор v , определяемый равенством (6.11), называется моментом пары; а поскольку он может быть приложен в любой точке тела, то это свободный вектор.
Следовательно, пара мгновенных угловых скоростей
эквивалентна мгновенной поступательной скорости, равной моменту этой пары.
Наоборот, всякая поступательная скорость v может быть представлена в виде пары мгновенных угловых скоростей, плоскость которой перпендикулярна к v , а плечо d и модули мгновенных угловых скоростей ω1 = ω2 = ω удовлетворяют равенству (6.12).
Если тело имеет вrданный момент мгновенное вращение с угловой скоростью ω вокруг оси, проходящей через точку
A , то состояние |
движения |
не изменится, |
если в любой |
|||
точке B приложить два вектора ω |
′ |
|
′ |
|||
|
= ω и −ω = −ω. |
|||||
|
ω′ |
|
|
|
ω |
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
B |
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
−ω′ |
|
|
|
|
Но векторы |
r |
r |
|
|
|
эквивалентную |
ω |
и −ω′ образуют пару, |
|||||
поступательной |
скорости |
r r |
|
Следовательно, |
||
v = ω× AB . |
||||||
мгновенное вращение тела с угловой скоростью ω вокруг оси, проходящей через точку A , эквивалентно мгновенному вращению с такой же угловой скоростью
′ |
|
ω =ω вокруг параллельной оси, проходящей через любую |
|
точку |
r r |
B , и поступательной скорости v = ω× AB . |
|
6.5. Сложение мгновенных угловой и поступательной скоростей.
Пусть теперь твердое тело совершает относительно системы Oxyz мгновенное вращение с угловой скоростью
ω, а сама эта система совершает по отношению к неподвижной O1ξηζ поступательное движение со
скоростью v (или наоборот, что в силу коммутативности мгновенных движений несущественно). Рассмотрим возможные частные случаи.
1) Поступательная скорость перпендикулярна к
мгновенной оси вращения Aa . |
|
|
|
|
|
Заменим в этом случае мгновенную |
поступательную |
||||
′ |
′ |
) , где ω |
′ |
= ω |
|
скорость v парой угловых скоростей (ω,−ω |
|
||||
|
|
′ |
|
′ |
) |
– заданная угловая скорость, и расположим пару (ω ,−ω |
|||||
так, как показано на рисунке; при этом, согласно (6.12), плечо пары d = v / ω.
Тогда мгновенные вращения вокруг одной и той же оси Aa с угловыми скоростями ω и − ω′ взаимно уничтожатся и останется только мгновенное вращение тела вокруг мгновенной оси Bb с угловой скоростью ω′.
aω′ b
b
ωB
d
A
v
−ω′
Итак, при сложении мгновенного вращательного движения АТТ с угловой скоростью ω и его же поступательного движения со скоростью v , направленной перпендикулярно к ω, результирующее движение будет мгновенным вращением с такой же (по модулю и направлению) угловой скоростью ω, но вокруг мгновенной оси, смещенной в плоскости, перпендикулярной к вектору v , на величину d = v / ω.
Частным примером такого случая сложения движений является плоскопараллельное движение АТТ или движение плоской фигуры в ее плоскости, которое слагается из поступательного движения вместе с полюсом и вращательного движения вокруг полюса, и которое эквивалентно в каждый момент времени мгновенному вращению с той же угловой скоростью вокруг мгновенного центра вращения.
2) Поступательная скорость v параллельна оси вращения ω.
В этом случае результирующее движение тела будет или перманентным, или мгновенным винтовым движением.
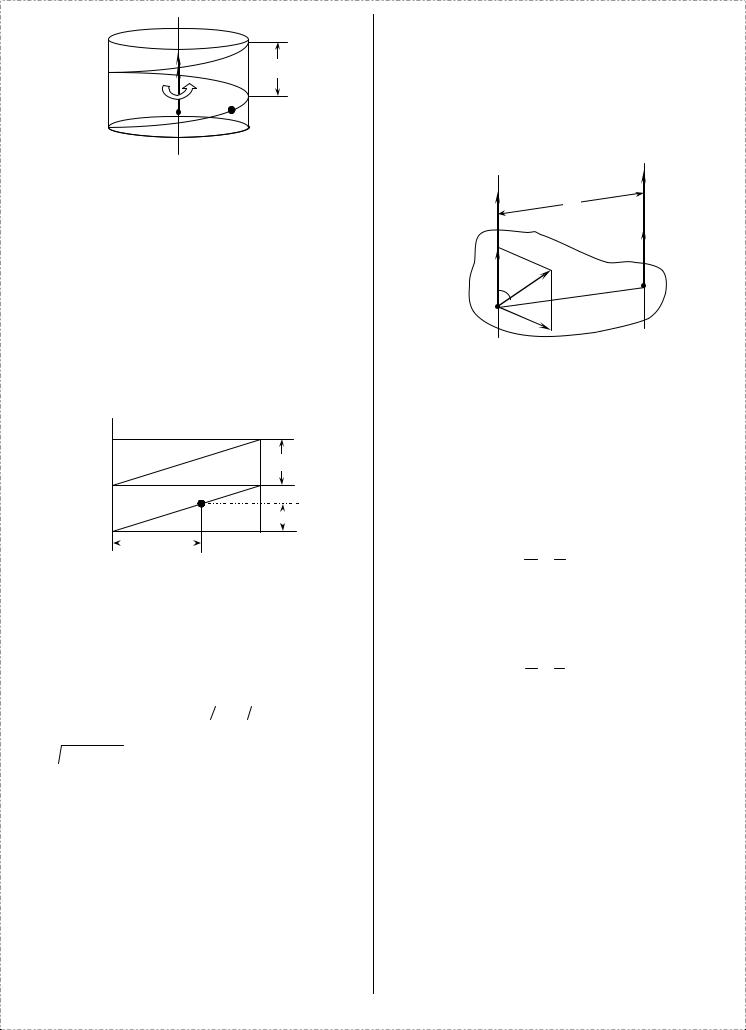
а) Винтовое движение (перманентное). Пусть движение тела слагается из равномерного вращения с угловой скоростью ω вокруг оси постоянного направления и равномерного прямолинейного поступательного движения со скоростью v , параллельной ω.
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
23 марта 2007 г. |
Кинематика |
Краткий курс Теоретической Механики |
22 |
|
v |
|
h |
ω |
M |
Результирующее движение тела в этом случае называется перманентным винтовым или просто винтовым движением, а ось вращения – осью винта. Любая точка M тела остается во время такого движения на поверхности круглого цилиндра, описывая винтовую линию.
Если разрезать цилиндр по той образующей, на которой точка M находилась в момент t = to , и развернуть его
поверхность на плоскость, то в течение первого оборота
положение точки M на |
развертке будет определяться |
координатами |
|
x1 = rωt , |
y1 = vt |
где r – есть расстояние от точки M до оси винта.
Отсюда вытекает, что траектория точки M на развертке будет прямой линией, наклоненной к оси Ox под углом
α = arctg(v rω) .
rω) .
|
y1 |
|
|
|
α |
|
h |
|
|
|
|
|
α |
M |
vt |
O |
|
||
|
|
||
r ωt |
|
x1 |
|
|
|
Если в данный момент точка M находится на некоторой образующей, то через промежуток времени T = 2π ω она вновь пересечет эту образующую,
ω она вновь пересечет эту образующую,
переместившись вдоль нее на расстояние h = vT = 2πv ω, которое не зависит от r , и называется шагом винта.
ω, которое не зависит от r , и называется шагом винта.
Величину p = v ω называют параметром винта.
ω называют параметром винта.
Отметим, что для винта имеют место следующие соотношения:
h = 2πp, tg(α) = p r = h 2πr .
Скорость точки M по модулю равна
vM =  v2 + r2ω2 , а направление ее составляет угол α с плоскостью, перпендикулярной к оси винта.
v2 + r2ω2 , а направление ее составляет угол α с плоскостью, перпендикулярной к оси винта.
Ускорение точки M направлено к оси винта (перпендикулярно к этой оси), а его модуль равен wM = rω2 .
б) Мгновенное винтовое движение. Если движение
тела слагается из мгновенного вращения с угловой r
скоростью ω и поступательного движения со скоростью v , параллельной мгновенной угловой скорости ω, то результирующее движение представляет собою мгновенное винтовое движение, а ось этого винта называется
мгновенной винтовой осью.
Как и мгновенная ось вращения, мгновенная винтовая ось меняет с течением времени свое положение в пространстве и в самом движущемся теле. Параметр
мгновенного винтового движения равен p = v ω и будет вообще тоже величиною переменной.
ω и будет вообще тоже величиною переменной.
3) Поступательная скорость v образует произвольный угол α с мгновенной осью вращения Aa (с
вектором ω).
Разложим скорость v на составляющие v′ и v′′ , направленные соответственно по заданной мгновенной угловой скорости ω и по перпендикуляру к ней.
a b ω′
ωd
|
v′ |
v′ |
|
v |
|
α |
B |
A |
|
v′′ |
|
Очевидно, что |
|
v = v′ + v′′, |
|
v′ = v cos(α), |
|
v′′ = v sin(α). |
|
Сложение мгновенной угловой скорости ω и перпендикулярной к ней поступательной скорости v′′ дает, согласно случаю 1), вращение с угловой скоростью ω′ = ω вокруг новой мгновенной оси Bb , лежащей в плоскости, перпендикулярной к вектору v′′ , при этом расстояние между осями Aa и Bb будет равно
d = vω′′ = ωv sin(α) .
В результате тело будет иметь мгновенную угловую ω′ = ω, направленную вдоль оси Bb , и параллельную ей поступательную скорость v′, которые, слагаясь, дают мгновенное винтовое движение с параметром
p = vω′ = ωv cos(α) .
Итак, результирующее движение АТТ в рассмотренном выше случае будет мгновенным винтовым движением вокруг оси Bb , параллельной вектору ω и отстоящей от оси Aa на расстоянии d .
Для заметок
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
__________________________________________________
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
23 марта 2007 г. |