

Для студентов / Методички / (2)Методичка - СТО-УКР / (3)CTO(укр)
.doc
Задача
9.
Ракета рухається прямолінійно з постійним
прискоренням
![]() відносно своєї супроводжуючої системи.
Скільки часу (за «земним годинником»)
ракета буде набирати швидкість:
відносно своєї супроводжуючої системи.
Скільки часу (за «земним годинником»)
ракета буде набирати швидкість:
![]() ?
?
Розв’язок:
Скористаємось формулою (), яка встановлює зв'язок між прискоренням ракети в ССВ і ЛСВ, яка пов’язується з Землею:
![]() , (55)
, (55)
і
врахуємо, швидкість
![]() ССВ
відносно Землі співпадає зі швидкістю
ракети в даний момент часу
ССВ
відносно Землі співпадає зі швидкістю
ракети в даний момент часу
![]() :
:
![]() .
Оскільки
.
Оскільки
![]() ,
то (55) можна переписати у вигляді рівняння
для швидкості ракети:
,
то (55) можна переписати у вигляді рівняння
для швидкості ракети:
![]() ,
,
![]() .
(56)
.
(56)
Після розділення змінних
воно легко інтегрується:
![]() , (57)
, (57)
де
![]() - постійна інтегрування. Приймаючи, що
при
- постійна інтегрування. Приймаючи, що
при
![]() ракета є нерухомою, ми знаходимо, що
ракета є нерухомою, ми знаходимо, що
![]() .
Неважко бачити,що залежність швидкості
ракети від часу описується рівнянням:
.
Неважко бачити,що залежність швидкості
ракети від часу описується рівнянням:
 . (58)
. (58)
Час
розгону ракети до швидкості
![]() безпосередньо знаходиться з (57):
безпосередньо знаходиться з (57):
![]() .
.
Підставляючи
в неї
![]() ,
знаходимо:
,
знаходимо:
![]() . (59)
. (59)
Задача
10.
Узагальнити перетворення Лоренца на
випадок довільної орієнтації вектора
![]() відносно систем
відносно систем
![]() та
та
![]() .
.
.
Розв’язок:
Перетворенням
Лоренца (7) і (8) можна надати наступне
нове тлумачення. Координати точки
![]() можна інтерпретувати як проекції
радіус-вектора
можна інтерпретувати як проекції
радіус-вектора
![]() точки на напрямок вектора швидкості
точки на напрямок вектора швидкості
![]() (
(![]() -координата)
і на площину, перпендикулярну до
-координата)
і на площину, перпендикулярну до
![]() (
(![]() і
і
![]() -
координати). У згоді з цим радіус-вектор
-
координати). У згоді з цим радіус-вектор
![]() представляється у вигляді суми
представляється у вигляді суми
![]() , (61)
, (61)
де
![]() і
і
![]() – його складові, направлені вздовж
вектора швидкості
– його складові, направлені вздовж
вектора швидкості
![]() і перпендикулярно до нього.
і перпендикулярно до нього.
Так
само можна розкласти і вектор
![]() :
:
![]() . (62)
. (62)
Поздовжня
і поперечна проекції
![]() та
та
![]() радіус-вектора перетворюються подібно
до координат точки
радіус-вектора перетворюються подібно
до координат точки
![]() та
та
![]() у формулах (7) і (8), тобто
у формулах (7) і (8), тобто
 , (63)
, (63)
Оскільки вектор швидкості точки може бути направленим у просторі будь-яким чином, формули (63) бажано переписати у векторній формі:
 , (64)
, (64)
З (64) і (61) та (62) випливає, що
![]() (65)
(65)
і
![]() ,
(65)
,
(65)
де
враховано, що
![]() .
.
Побудуємо
тепер поздовжні і поперечні складові
радіус-вектора у явному вигляді. Введемо
одиничний вектор
![]() ,
направлений вздовж швидкості відносного
руху ІСВ
,
направлений вздовж швидкості відносного
руху ІСВ
![]() та
та
![]() .
Тоді проекція радіус-вектора на напрямок
швидкості дорівнює:
.
Тоді проекція радіус-вектора на напрямок
швидкості дорівнює:
![]() ,
а сама поздовжня складова представляється
добутком проекції на відповідний
одиничний вектор:
,
а сама поздовжня складова представляється
добутком проекції на відповідний
одиничний вектор:
![]() .
(66)
.
(66)
У згоді з цим поперечна складова радіус-вектора має структуру:
![]() .
.
Подібні формули мають місце і для
![]() ,
,
![]() .
(67)
.
(67)
Підставляючи (67) у (65), отримаємо шукане перетворення
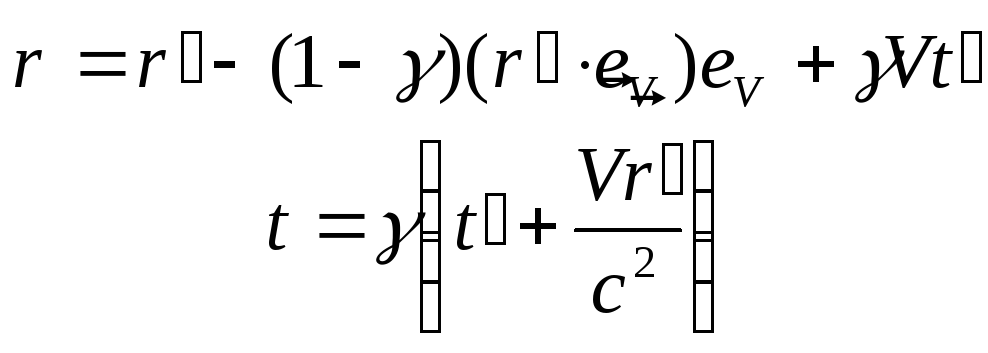 (71)
(71)
Задача
11.
Знайти закон перетворення швидкості
точки у випадку довільної орієнтації
вектора
![]() відносно систем
відносно систем
![]() та
та
![]() .
.
Розв’язок:
Для
одержання відповіді на поставлене
питання достатньо обчислити диференціали
![]() і
і
![]() ,
спираючись на формули (71), і поділити
перший з них на другий. В силу лінійності
співвідношень (71), диференціали
,
спираючись на формули (71), і поділити
перший з них на другий. В силу лінійності
співвідношень (71), диференціали
![]() і
і
![]() дорівнюють:
дорівнюють:
![]() ,
(72)
,
(72)
![]() . (73)
. (73)
Поділимо
тепер
![]() на
на![]() і
врахуємо
означення векторів швидкостей в системах
відліку
і
врахуємо
означення векторів швидкостей в системах
відліку
![]() та
та
![]() :
:
![]() і
і
![]() .
Після тривіальних перетворень знаходимо:
.
Після тривіальних перетворень знаходимо:
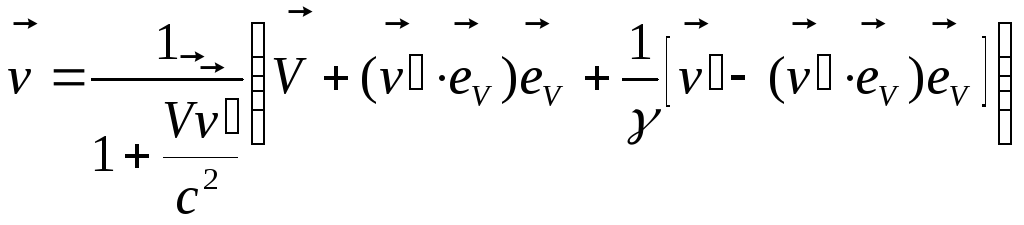 .
(74)
.
(74)
Це
і є загальна формула закону додавання
швидкостей у
випадку довільної орієнтації вектора
![]() відносно систем відліку
відносно систем відліку![]() та
та
![]() .
.
Чотиривимірні вектори (чотири-векторы)
а)
чотиривимірний радіус-вектор.
З метою спрощення кінематики спеціальної
теорії відносності є доцільним перейти
від просторових координат
![]() точки
і змінної часу
точки
і змінної часу
![]() до 4-х однотипних координат
до 4-х однотипних координат
![]() ,
утворених за правилом:
,
утворених за правилом:
![]() ,
,
![]() ,
,
![]() і
і
![]() ,
де
,
де
![]() -
уявна одиниця. Сукупності координат
-
уявна одиниця. Сукупності координат
![]() ставиться
у відповідність 4-х радіус-вектор
ставиться
у відповідність 4-х радіус-вектор
![]() .
Квадрат його довжини визначається
стандартним чином:
.
Квадрат його довжини визначається
стандартним чином:
![]() ,
де
,
де
![]()
![]() ,
а по індексам, що повторюються, виконується
сумування:
,
а по індексам, що повторюються, виконується
сумування:
![]() .
.
Перепишемо тепер перетворення Лоренца (7) і (8) у 4-х вимірному вигляді. З алгебраїчної точки зору перетворення Лоренца мають лінійний характер, тому у 4-х вимірному просторі вони набувають матричної форми:
![]() , (76)
, (76)
де
![]() і
і
![]() є
компонентами 4-х
радіус-вектора в
ІСВ
є
компонентами 4-х
радіус-вектора в
ІСВ
![]() і
і
![]() відповідно. Неважко впевнитись, що
матриця
відповідно. Неважко впевнитись, що
матриця
![]() перетворення має вигляд:
перетворення має вигляд:
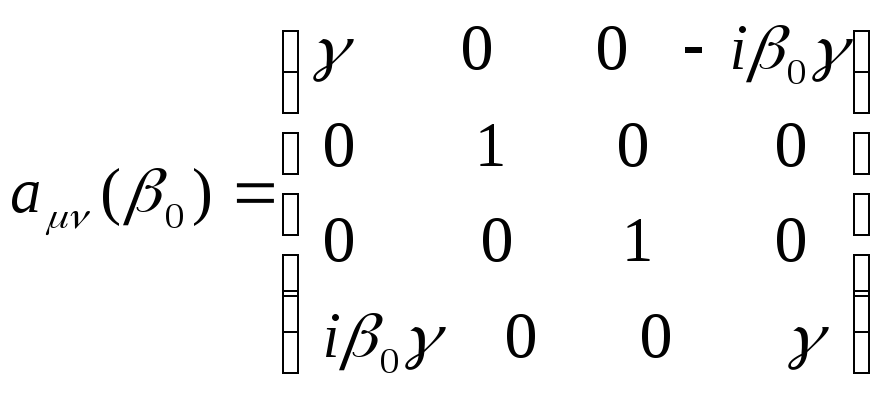 , (77)
, (77)
де,
як і раніше,
![]() і
і
![]()
Оберненому перетворенню:
![]() , (78)
, (78)
відповідає
матриця
![]() ,
яка відрізняється від (77) тільки знаком
відносної швидкості однієї ІСВ відносно
другої, тобто
,
яка відрізняється від (77) тільки знаком
відносної швидкості однієї ІСВ відносно
другої, тобто
![]() .
Переходу від
.
Переходу від
![]() до
до
![]() в (77) формально відповідає операція
транспозиції матриці:
в (77) формально відповідає операція
транспозиції матриці:
![]() ,
або
,
або
![]() .
За своїм смислом
.
За своїм смислом
![]() є матрицею, оберненою до
є матрицею, оберненою до
![]() ,
що дозволяє написати наступні
співвідношення:
,
що дозволяє написати наступні
співвідношення:
![]() .
.
Квадрат інтервалу для нескінчено близьких подій представляється у вигляді:
![]() ,
(79)
,
(79)
тобто, квадрат диференціала 4-х радіус-вектора є інваріантним відносно перетворень Лоренца, або перетворень (76) чи (78).
Оскільки
![]() ,
(80)
,
(80)
то
матриця
![]() повинна задовольняти наступним умовам
ортогональності:
повинна задовольняти наступним умовам
ортогональності:
![]() і
і
![]() .
(81)
.
(81)
Друге з рівнянь (81) можна записати у вигляді
![]() .
(82)
.
(82)
Виходячи
з того, що детермінант добутку матриць
дорівнює добутку детермінантів:
![]() ,
а
,
а
![]() ,
з (82) знаходимо:
,
з (82) знаходимо:
![]() ,
або
,
або
![]() .
Оскільки при
.
Оскільки при
![]() перетворення Лоренца стає тотожнім і
для нього
перетворення Лоренца стає тотожнім і
для нього
![]() ,
ми робимо висновок, що завжди
,
ми робимо висновок, що завжди
![]() .
(83)
.
(83)
В справедливості (83) можна переконатись і прямим підрахунком на основі (77).
Якщо
набір яких-небудь чотирьох величин
![]() при переході від однієї ІСВ до іншої
перетвор.ється як чотири-радиус-вектор,
то кажуть, що величини
при переході від однієї ІСВ до іншої
перетвор.ється як чотири-радиус-вектор,
то кажуть, що величини
![]() утворюють чотирих-вектор. Тобто усі
чотири-вектори перетворюються за законом
утворюють чотирих-вектор. Тобто усі
чотири-вектори перетворюються за законом
![]() ;
; ![]() . (81)
. (81)
Диференцюючи
обидів частини (81), бачимо, що диференціали
компонент будь-якого чотири-вектора
утворюють чотири-вектор. В окремісті,
чотири-вектор утворюють величины
![]() :
:
![]() . (82)
. (82)
З
урахуванням (71) формулу (78) можна
узагальнити на випадок довільного
напрямку відносної швидкості
![]() :
:
![]() , (79)
, (79)
де
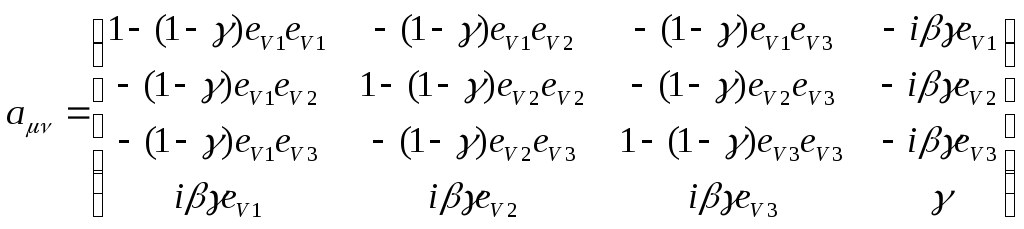 .
(80)
.
(80)