

Михайлов Аналитическая геометрия 2008
.pdfОпределение 4.3. Упорядоченная тройка некомпланарных
|
является |
правой, |
если, после |
приведения |
векторов a, b, c |
||||
векторов к общему началу, |
вектор |
|
|
|
c располагается так, |
||||
|
|
|
|
|
что из его конца кратчайший поворот от a |
к b виден |
|||
происходящим в направлении против часовой стрелки. (В противном случае тройка векторов считается левой.)
Это утверждение справедливо для тройки векторов i , j, k
и для системы декартовых координат в пространстве. Векторное произведение имеет следующие алгебраичес-
кие свойства:
1) |
|
|
|
|
, (антиперестановочность) |
||||
a |
b |
b |
a |
||||||
2) |
|
|
|
|
|
|
|
|
|
|
a |
b |
|
|
a |
b , |
|
|
|
3) |
|
|
|
|
|
|
|
|
, |
a |
b |
c |
a |
c |
b |
c |
|||
4)a a 0 .
Теорема 4.3. Необходимым и достаточным условием коллинеарности двух векторов является равенство нулю их векторного произведения.
Доказательство. Если a 0 и b 0 , то доказательство необходимости и достаточности утверждения теоремы следует из (4.12) и того факта, что условие sin 0 при
0 при
0 также является необходимым и достаточным.
Теорема 4.4. Модуль векторного |
|
|
произведения a |
b |
|
равняется площади S параллелограмма, |
построенного |
на |
приведенных к общему началу векторах a и b .
Доказательство. Поскольку площадь параллелограмма равна произведению длин его смежных сторон на синус угла между ними, доказательство теоремы следует из формулы
(4.12).
Теорема 4.5. Если вектора представлены разложениями
но базису i , j, k
41
|
|
|
|
|
|
|
|
a |
X1 i |
Y1 j |
Z1 k , |
b |
X 2 i |
Y2 j |
Z2 k , (4.13) |
то их векторное произведение имеет вид:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
j |
|
k |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.14) |
|||||
|
|
|
|
|
|
a b |
|
|
X1 |
Y1 |
|
Z1 |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X 2 |
Y2 |
|
Z 2 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
Доказательство. Перемножив векторные многочлены |
|||||||||||||||||||||||||||||||
(4.13), получим, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
a b |
X1 X 2 i i |
|
|
|
|
X1Y2 i j X1Z 2 i k Y1 X 2 j i |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Y1Y2 j j Y1Z 2 |
|
j k Z1 X 2 k i Z1Y2 |
k j Z1Z 2 k k |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i Y1Z 2 |
Y2 Z1 |
|
|
|
j Z1 X 2 |
Z 2 X1 |
|
k X1Y2 |
X 2Y1 |
|
|||||||||||||||||||||
|
|
|
|
|
Y |
Z |
1 |
|
|
|
|
|
|
X |
1 |
|
Z |
1 |
|
|
|
|
X |
1 |
Y |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
i |
|
1 |
|
|
|
|
j |
|
|
|
|
|
|
k |
|
|
|
1 |
|
|
4.15 |
|
|||||||
|
|
|
|
Y2 |
Z 2 |
|
|
|
|
|
X 2 |
Z 2 |
|
|
X 2 |
Y2 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Строка (4.15) последнего выражения получена с учетом |
|||||||||||||||||||||||||||||||
того, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
i i |
0, i j |
k , i k |
|
|
j , |
|
j i |
|
|
k , |
j j |
0, |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.16) |
|
||||||||
j k |
i , |
k i |
|
|
|
j , |
k j |
|
i , |
k k |
|
0. |
|
|
|
|
||||||||||||||||
(Знак |
минус в |
этих произведениях |
|
получается вследствие |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
нарушения порядка в тройке ортов |
i |
j k .) |
|
|
|
|
|
|
||||||||||||||||||||||||
|
Очевидно, что выражение (4.15) есть разложение |
|||||||||||||||||||||||||||||||
определителя (4.14) по элементам первой строки. |
|
|
||||||||||||||||||||||||||||||
|
Теорема доказана. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
Если |
|
два |
вектора |
|
|
|
|
и |
||||||||||||||||||
|
Следствие. |
|
|
|
a |
|
X1i |
Y1 j |
Z1k |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
b |
X |
2i |
Y2 j |
Z2 k коллинеарны, |
|
то |
|
координаты |
их |
|||||||||||||||||||||||
пропорциональны, т.е. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
X1 |
|
|
|
Y1 |
|
|
Z1 |
. |
|
|
|
|
|
|
|
|
|
|
(4.17) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
X 2 |
|
|
|
Y2 |
|
Z 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
42
Доказательство. Поскольку векторное произведение коллинеарных векторов равно нулю, из соотношения (4.15) следует, что
Y1Z2 Y2 Z1, |
Z1 X 2 |
Z2 X1, |
X1Y2 |
X 2Y1 (4.18) |
|||||
Из первого равенства после деления на произведение Y2 Z 2 |
|||||||||
получим пропорцию |
Y1 |
|
Z1 |
. Аналогичным образом из |
|||||
Y2 |
|
Z 2 |
|||||||
|
|
|
|
|
|
|
|
||
второго равенства получаем пропорцию |
|
Z1 |
|
X1 |
. |
||||
|
|
|
|
||||||
|
|
|
|
|
|
Z 2 |
X 2 |
||
Следствие доказано.
Впропорции (4.17) возможно появление нулей в знаменателе.
Всоответствии с (4.18) это означает, что соответствующий числитель тоже равен нулю.
Для |
последующих |
выкладок нам |
удобно |
считать, |
||||||
|
|
|
|
|
|
|
|
|
|
|
что a |
b |
d . |
|
|
|
|
|
|
|
|
Следствие 1. Если |
|
−орт вектора |
|
|
|
|
||||
|
|
|||||||||
e |
d , а S |
|
a |
b |
|
|
||||
|
|
|
|
d |
|
|
|
|
|
|
−площадь параллелограмма, построенного на перемножаемых векторах, приведенных к общему началу, то
|
|
|
|
|
|
|
S |
|
|
|
|
|
(4.19) |
||
|
|
|
|
|
|
||||||||||
d |
|
a |
b |
|
|
e |
e |
|
|
|
|
||||
|
|
|
|
|
|
d |
|
d |
|
|
|
|
|
|
|
Определение 4.4. |
Если |
векторное |
произведение |
||||||||||||
a |
b |
||||||||||||||
умножить скалярно |
на |
вектор |
|
то |
число |
|
|
|
|||||||
c , |
a b |
c |
|||||||||||||
называется смешанным произведением векторов |
|
|
|
||||||||||||
a, b и c . |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
равно |
|
||
Теорема 4.6. Смешанное произведение a |
b |
c |
|
||||||||||||
объѐму параллелепипеда, построенного на приведенных к |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
общему началу векторах a, b |
и c , взятому со знаком плюс, |
||||||||||||||
если тройка векторов правая, и со знаком минус, если тройка
abc левая. Если же перемножаемые вектора компланарны,
43
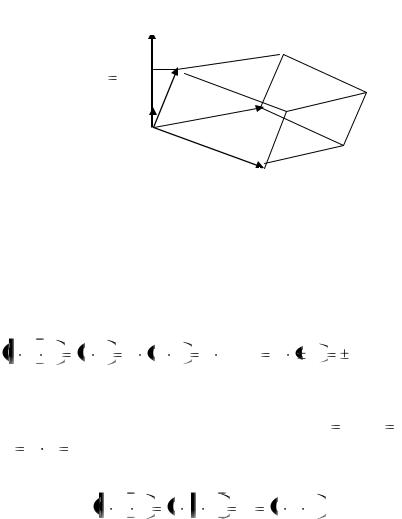
то их смешанное произведение ровно нулю.
|
|
|
|
|
||
|
|
|
d |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ïð |
d c |
h |
|
||
|
|
|
|
|
||
|
|
|
e |
|||
|
|
|
d |
b |
||
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
Рис. 4.1 |
|
|
Доказательство. |
Тривиальный |
случай коллинеарности |
||||
векторов |
|
|
исключим, так как векторное произведение |
|||
a |
и b |
|||||
коллинеарных векторов равно нулю. Тогда, используя
выражение |
|
(4.19), |
|
|
можно |
произвести |
следующее |
|||
преобразование |
|
|
|
|
|
|
||||
|
|
|
|
|
|
h |
V . (4.20) |
|||
a |
b |
c |
d |
c S |
e |
|
c S Ïð |
c S |
||
|
|
|
|
|
d |
|
d |
|
|
|
(Знак + берем в случае, если тройка векторов правая).
Если же вектора |
|
|
и |
|
компланарны, |
то вектор |
|
лежит в |
|||
a, b |
c |
c |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
плоскости векторов |
a |
и |
b , |
следовательно h Ïð |
d c 0 и |
||||||
V S h 0 . |
|
|
|
|
|
|
|
|
|
|
|
Теорема доказана. |
|
|
|
|
|
|
|
|
|
||
Следствие 1. Справедливо равенство |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
(4.21) |
||
a |
b |
c |
|
a |
b |
c |
V a |
b |
c |
|
|
Объѐм параллелепипеда не зависит от того, какая пара векторов из тройки перемножается векторно. Знак
44
произведения не изменяется, так как сохраняется порядок векторов и ориентация тройки векторов.
Следствие 2. Необходимым и достаточным условием компланарности трех векторов является равенство нулю их
смешанного произведения. |
|
|
|
|
|
|
|
|||||
|
Теорема |
4.7. |
|
Если |
|
три |
вектора |
представлены |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
разложениями по базису i , |
j , k |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a i X1 |
jY1 |
kZ1 , b i X 2 |
|
jY2 |
kZ2 , c i X 3 |
jY3 |
kZ3 , |
|||||
то их смешанное произведение равно следующему определителю:
|
|
|
|
|
|
|
|
|
|
X1 |
Y1 |
|
|
Z1 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
a |
b |
c |
|
|
|
X 2 |
Y2 |
|
Z 2 |
|
|
|
|
|
|
|
(4.22) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
X 3 |
Y3 |
|
Z3 |
|
|
|
|
|
|
|
|
|
|||||
Доказательство. Из формулы (4.15) следует, что: |
|
|
|||||||||||||||||||||||||||
|
|
|
|
Y |
|
Z |
1 |
|
|
|
|
X |
1 |
Z |
1 |
|
|
|
X |
1 |
Y |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||||||
a b i |
|
Y2 |
|
Z 2 |
|
|
j |
|
X 2 |
Z 2 |
|
k |
|
|
|
X 2 |
Y2 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Умножив скалярно этот вектор на вектор c , получим, |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
Y1 |
|
|
Z1 |
|
|
|
X1 |
|
Z1 |
|
|
|
|
X1 |
Y1 |
|
(4.23) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
a b |
c |
|
X 3 |
Y |
|
|
Z |
2 |
|
|
Y3 |
X |
2 |
|
Z |
2 |
|
|
|
Z3 |
X |
2 |
Y |
|
|||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
||||||
Полученное выражение (4.23) есть разложение определителя (4.22) по элементам третьей строки. Теорема доказана.
Задачи № 795, 800, 803, 812, 818, 820, 829, 834, 840, 847, 851, 858, 875, 877.
§ 5. Прямая линия на плоскости
Определение 5.1. Уравнение
F x, y 0 |
(5.1) |
называется уравнением линии на плоскости относительно заданной системы координат, если ему удовлетворяют координаты точек, принадлежащих некоторой линии L , и не
45
удовлетворяют координаты точек, не принадлежащих этой линии.
Определение 5.2. Линия называется алгебраической, если в некоторой прямоугольной системе координат F x, y есть
есть
полином некоторой степени.
Алгебраическая линия называется линией n - го порядка если F x, y − полином степени n .
− полином степени n .
Теорема 5.1. Если линия в некоторой прямоугольной системе координат определяется алгебраическим уравнением степени n , то и в другой прямоугольной системе координат степень уравнения будет равна n .
Без доказательства.
В трехмерном пространстве определения 5.1 и 5.3 и утверждение теоремы 5.1 можно повторить, заменив слово линия словом поверхность.
Теорема 5.2. Если на плоскости фиксирована прямоугольная система координат Oxy , то любая прямая L ,
принадлежащая плоскости, определяется в этой системе координат уравнением первой степени.
Доказательство. При специальном выборе системы
координат, |
если |
ось Ox совпадает с прямой, уравнение |
прямой « y |
0 » |
совпадает с уравнением оси Ox . В |
соответствии с утверждением теоремы 5.1 в любой другой прямоугольной системе координат степень уравнения сохранится.
Пусть уравнение прямой имеет вид:
A x B |
y C |
0 , |
|
A |
|
B |
0 |
(5.1) |
Пусть задана |
точка |
M 0 |
x0 , y0 |
, |
координаты |
которой |
||
удовлетворяют уравнению.
A x0 B y0 C 0 . |
(5.2) |
Вычитая (5.2) из (5.1), получаем:
A x x0 B y y0 0 . |
(5.3) |
46

Дадим векторное истолкование уравнения (5.3).
|
Пусть |
|
|
|
|
|
|
|
A, B |
, |
|
A и B − координаты некоторого вектора n |
|||||||||
а |
x |
|
x0 |
|
и |
y y0 |
−компоненты |
вектора |
||
M 0 M |
x |
x0 , |
y y0 |
, начало которого |
совпадает |
с |
||||
точкой M 0 |
x0 , y0 |
, а конец совпадает с произвольной точкой |
||||||||
M x, y , принадлежащей прямой. |
|
|
|
|
||||||
|
Очевидно, что скалярное произведение |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
n M 0 M A x x0 |
B y y0 0 |
|
|
|||||
|
|
|
|
|
|
|
|
и M 0 M . |
|
|
является условием ортогональности векторов n |
|
|||||||||
|
|
|
A, B называется нормальным вектором прямой. |
|
||||||
Вектор n |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
 M
M
M 0
Рис. 5.1
Уравнение (5.3) есть уравнение прямой, проходящей через |
||
точку M 0 x0 , y0 перпендикулярно вектору |
|
. Уравнение |
n |
||
(5.3) эквивалентно уравнению (5.1), которое называется
общим уравнением прямой.
При условии |
A |
|
B |
|
0 рассмотрим неполные уравнения |
прямой. |
|
||||
1). C 0 . Уравнение |
A x B y 0 определяет прямую, |
||||
проходящую через начало координат.
47
2) |
A |
0 . Уравнение B y |
C |
0 |
определяет уравнение |
|
прямой, параллельной оси Ox . |
|
|
|
|||
3) |
B |
0 . Уравнение A x |
C |
0 |
определяет уравнение |
|
прямой, параллельной оси Oy . |
|
|
|
|||
4) |
A |
0, C |
0 . Уравнение B y |
0 определяет уравнение |
||
оси Ox . |
|
|
|
|
|
|
5) |
B |
0, C |
0 . Уравнение A x |
0 определяет уравнение |
||
оси Oy .
Из уравнения (5.1) можно получить уравнение прямой в
отрезках. |
|
|
|
|
|
|
|
|
|||||
|
|
|
x |
|
|
y |
1 |
(5.4) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
a |
|
|
b |
|||||||
|
|
|
|
|
|
|
|
||||||
В самом деле, уравнение |
|
|
|
|
|
|
|
|
|||||
|
x |
|
|
y |
|
1 |
(5.5) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
C |
|
|
|
C |
|
||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
A |
|
|
|
B |
|
|
|
||||
получено из уравнения (5.1) с помощью элементарных алгебраических преобразований.
Обозначив a  CA , b
CA , b  CB , получим уравнение (5.4).
CB , получим уравнение (5.4).
Чтобы найти координаты точки пересечения прямой с осью Ox , решим систему уравнений, состоящую из уравнения (5.4) и уравнения оси Ox .
x |
y |
1 |
x |
|
|
||
|
|
|
1 x a . |
(5.6) |
|||
a |
b |
||||||
|
a |
||||||
|
|
|
|||||
|
y |
|
0 |
|
|
||
|
|
|
|
|
|||
Аналогично можно получить, что y b координата точки пересечения с осью Oy .
Определение 5.3. Любой ненулевой вектор, параллельный данной прямой будем называть направляющим вектором прямой.
48
Задача 5.1. Составить уравнение прямой L , проходящей
|
|
|
|
|
через точку M1 x1 , y1 параллельно вектору q l, m . |
||||
Решение. Рассмотрим вектор M1M |
x |
x1 , y y1 , |
||
начало которого совпадает с точкой M1 , а конец − в |
||||
произвольной точке M x, y . |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
M |
|
|
|
M1 |
|
|
||
Рис. 5.2 |
|
|
||
Чтобы точка M лежала на прямой L , |
вектор M1M должен |
|||
|
|
|
параллельности |
|
быть параллелен вектору q . Условие |
||||
векторов состоит в пропорциональности сходственных координат, из чего следует
x x1 |
|
y y1 |
. |
(5.7) |
|
|
|||
l |
|
m |
|
|
(Нуль в знаменателе в этой пропорции означает, что соответствующий числитель тоже обращается в нуль.)
Это уравнение называется каноническим уравнением прямой.
Приравняв выражение (5.7) параметру t , получим
параметрические уравнения прямой.
x |
x1 |
l |
t |
|
(5.8) |
y |
y1 |
m |
|
t |
|
|
|
49
Если принять что, t −время, а |
|
|
|
вектор скорости, |
v |
i l |
j m |
то уравнения (5.8) определяют две проекции уравнения движения точки на координатные оси.
Уравнение прямой, проходящей через две заданные точки
M1 x1 , y1 и M 2 x2 , y2 |
получим из уравнения (5.7), приняв, |
||||||||
что направляющий вектор |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
(5.9) |
q |
M1M 2 |
|
x2 |
x1 |
y2 |
y1 |
|||
и подставив выражение (5.9) в (5.7): |
|
|
|||||||
|
|
x |
x |
|
y |
y1 |
|
|
(5.10) |
|
|
x2 |
x1 |
y2 |
y1 |
|
|||
|
|
|
|
||||||
Уравнение |
прямой |
с |
угловым |
коэффициентом k |
|||||
получим, приняв, что угловой коэффициент равен тангенсу
угла наклона направляющего вектора q :
k tg |
m |
(5.11) |
|
|
|||
l |
|||
|
|
y
L
b
q
m
x
l
Рис. 5.3
Умножив выражение (5.7) на число m и подставив в него
(5.11), получим:
50