

Н.Р. Масленников Транспортные машины. Расчет ленточного конвейера
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ГОСУДАРСТВЕННОЕ УЧРЕЖДЕНИЕ
КУЗБАССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра стационарных и транспортных машин
ТРАНСПОРТНЫЕ МАШИНЫ
РАСЧЕТ ЛЕНТОЧНОГО КОНВЕЙЕРА
Методические указания по выполнению контрольного задания, курсовой работы и раздела курсового проекта для студентов дневной и заочной форм обучения специальности 170100 «Горные машины и оборудование» специализации «Производство и конструирование горных машин
и оборудования»
Составители Н.Р. МАСЛЕННИКОВ Н.В. ЕРОФЕЕВА
Рассмотрены и утверждены на заседании кафедры Протокол № 188 от 15.10.01
Рекомендованы к печати учебнометодической комиссией специальности 170100 Протокол № 3 от 27.11.01
Электронная копия находится в библиотеке главного корпуса ГУ КузГТУ
Кемерово 2002
1
Одним из основных направлений совершенствования подземного транспорта угольных шахт является конвейеризация. Уровень конвейеризации наклонных выработок, служащих для транспортирования угля из очистных забоев, составляет около 85%, а горизонтальных – 22%. Основная часть этих выработок оснащена ленточными конвейерами, позволяющими повысить пропускную способность конвейерных линий и снизить трудоемкость их обслуживания.
Расчет ленточных конвейеров производится с целью определения усилий, действующих в ленточном тяговом органе, проверки соответствия выбранной ленты заданным условиям эксплуатации при обеспечении необходимого запаса ее прочности, получения необходимой мощности привода и соответствия ее количеству выбранных двигателей. Проверка правильности расчетов производится методом построения диаграммы натяжения ленты конвейера.
1. ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА Основными показателями, от которых зависят правильность вы-
бора конвейера и его расчета, являются:
L – длина конвейера, м. Она может не соответствовать расстоянию транспортирования, если в выработке установлено несколько конвейеров последовательно; β – угол наклона конвейера, град;
Qэ – эксплуатационная нагрузка на конвейер, т/ч, определяется с учетом фактической или расчетной неравномерности грузопотока за время прохождения груза по всей длине рассчитываемого конвейера по формулам:
для случая поступления грузопотока в одной точке:
-от одного забоя
Qэ = 60 а1(п) кt(L);
-от двух и более очистных забоев
Qэ = 60Σа1(п) кt(L);
для случая поступления грузопотоков в двух и более точках с учетом неодинакового их количества, транспортируемых по различным отрезкам става конвейера, а следовательно, и неодинаковой нагрузки на этих отрезках
Qэ(прив) = (Qэ1 l1 + Qэ2 l2 + … + Qэn ln) / L , т/ч
2
где а1(п) и Σа1(п) – соответственно средний и суммарный минутный грузопотоки за время поступления угля от одного или нескольких очистных забоев [1, формулы (3.1) и (3.10)];
кt(L) – расчетный коэффициент нагрузки, учитывающий неравномерность грузопотока за время прохождения груза по всей длине конвейера (L). Принимается по [1, табл. 5.4];
l1, l2 , ln – длины отрезков конвейера, на которых действуют соответствующие долевые значения эксплуатационных нагрузок, м;
Qэ1, Qэ2, Qэn – долевые значения эксплуатационных нагрузок, создаваемые на соответствующих отрезках конвейера, т/ч.
Погонная масса груза на конвейере (т.е. приведенная к одному метру длины груженой ветви ленты ) определяется как:
q = Qэ/3,6 v, или q = Qэ(прив)/3,6 v, кг/м.
Для людских и грузолюдских конвейеров при посадке людей на движущуюся ленту она принимается
q = 20 кг/м.
Для выбранного типа конвейера по его технической характеристике принимается тип ленты, рекомендованной к установке на этом конвейере. Погонная масса одного метра длины ленты определяется
как qл = mл В, кг/м
где mл – расчетная масса одного квадратного метра ленты, кг В – ширина ленты, м.
Таблица 1 Технические характеристики шахтных трудносгораемых (ШТС) или трудногорючих (ТГ) резинотросовых конвейерных лент
по ТУ 38-605166-91
Тип ленты |
Номинальная раз- |
Толщина ленты |
Расчетная |
/ранее существующие |
рывная прочность |
(обкладка/ диаметр |
масса ленты |
обозначения/ |
ленты σвр, Н/мм |
троса/ обкладка), |
mл, кг/м2 |
|
|
мм |
|
2РТЛ ШТС (ТГ)-1000 |
1000 |
7,0/4,2/7,0 |
29,0 |
/2РТЛО-1000/ |
|
|
|
|
|
|
|
2РТЛ ШТС (ТГ)-1500 |
1500 |
7,0/4,2(6,0)/7,0 |
34,0 |
/2РТЛО-1500/ |
|
|
|
|
|
|
|
2РТЛ ШТС (ТГ)-2000 |
2000 |
7,0/7,5/7,0 |
41,0 |
|
|
|
|
2РТЛ ШТС (ТГ)-2500 |
2500 |
10,0/7,5/7,0 |
44,0 |
/2РТЛО-2500/ |
|
|
|
3
Продолжение табл.1
Тип ленты |
Номинальная раз- |
Толщина ленты |
Расчетная |
/ранее существующие |
рывная прочность |
(обкладка/ диаметр |
масса ленты |
обозначения/ |
ленты |
троса/ обкладка), |
mл, кг/м2 |
|
σвр, Н/мм |
мм |
|
2РТЛ ШТС (ТГ)-3150 |
3150 |
10,0/8,25/10,0 |
48,0 |
/2РТЛО-3150/ |
|
|
|
2РТЛ ШТС (ТГ)-4000 |
4000 |
10,0/10,6/10,0 |
58,0 |
/2РТЛО-4000/ |
|
|
|
2РТЛ ШТС (ТГ)-5000 |
5000 |
10,0/10,6/10,0 |
63,0 |
|
|
|
|
Таблица 2 Технические характеристики шахтных трудносгораемых
резинотканевых конвейерных лент по ОСТ 153-122-001-97
Тип ленты |
Толщина |
Расчетная масса 1м2 ленты mл, |
Предел |
||||
/ранее сущест- |
обкладок |
(кг/м2) при числе тканевых |
прочности на |
||||
вующие |
|
|
прокладок i, (шт.) |
|
разрыв |
||
обозначение/ |
|
2 |
3 |
4 |
5 |
6 |
σвр, Н/см |
/2ШТК(А)100/ |
4,5/3,5 |
- |
- |
14,0 |
15,2 |
16,4 |
100 |
|
|
|
|
|
|
|
|
2ШТС(ТГ)-200 |
4,5/3,5 |
- |
18,9 |
21,9 |
22,9 |
24,9 |
200 |
/2ШТК-200/ |
|
|
|
|
|
|
|
2ШТС(ТГ)-300 |
4,5/3,5 |
- |
21,9 |
25,9 |
28,5 |
31,5 |
300 |
/2ШТК-300/ |
|
|
|
|
|
|
|
2ШТС(ТГ)-400 |
4,5/3,5 |
22,1 |
22,8 |
26,4 |
30,0 |
34,0 |
400 |
/2ШТК(А)-400/ |
|
|
|
|
|
|
|
2ШТС(ТГ)-500, |
4,5/3,5 |
по |
индивидуальному заказу |
500, |
|||
600, 800, 1000 |
|
|
|
|
|
|
600, 800, 1000 |
Примечание: При изменении толщины резиновых обкладок лент всех типов и видов на 1 мм расчетная масса 1м2 ленты изменяется на 1,5 кг.
Чтобы определить погонные массы вращающихся частей роликоопор верхней (груженой) и нижней (порожней) ветвей ленты, соот-
ветственно q′р и q′′р, необходимо найти по характеристике конвейера массы вращающихся частей роликоопор на верхней (m′р) и на нижней (m′′р) ветвях ленты и соответствующие им расстояния между ролико-
опорами на этих ветвях l′р и l′′р. Тогда q′р = m′р/l′р и q′′р = m′′р/l′′р , кг/м.
Тяговый фактор приводов конвейеров определяется как:
4
А = еµα – для конвейеров, имеющих однобарабанный или двухбарабанный привод с жесткой кинематической связью между барабанами, где α – суммарный угол обхвата приводных барабанов лентой, рад;
µ – коэффициент трения между приводными барабанами и лентой, зависящий от наличия футеровки на барабанах, типа ленты и места установки конвейера. Рекомендуемые значения коэффициентов трения приведены в табл. 3.
Таблица 3 Значения коэффициента трения µ между поверхностью
барабана и лентой
|
Наличие резино- |
Расчетный коэффициент трения |
||
Условия применения |
µ при виде обкладки ленты |
|||
конвейера |
вой негорючей |
|
|
|
негорючая |
ПВХ |
|||
|
футеровки |
резина |
|
|
|
|
|
||
|
|
|
|
|
Выработки, примыка- |
Нет |
0,15 |
0,10 |
|
ющие к очистному |
|
|
|
|
забою |
Есть |
0,25 |
0,15 |
|
|
|
|
|
|
Остальные выработки |
Нет |
0,25 |
0,15 |
|
Есть |
0,30 |
0,25 |
||
|
||||
|
|
|
|
|
Таблица 4 Значения тягового фактора привода в зависимости от угла обхвата лентой барабана α и расчетного коэффициента трения µ
|
|
|
|
|
|
|
|
|
|
|
|
Коэффициент |
Значение тягового фактора А = еµα при углах обхвата α |
||||||||||
трения µ между |
|
|
|
|
|
|
град/рад |
|
|
|
|
барабаном и |
180 |
|
210 |
|
240 |
300 |
|
360 |
400 |
450 |
480 |
лентой |
3,14 |
|
3,66 |
|
4,19 |
5,24 |
|
6,28 |
7,0 |
7,85 |
8,38 |
0,10 |
1,37 |
1,44 |
1,52 |
1,69 |
|
1,88 |
2,01 |
2,19 |
2,32 |
||
0,15 |
1,60 |
1,73 |
1,88 |
2,20 |
|
2,57 |
2,85 |
3,25 |
3,51 |
||
0,25 |
2,20 |
2,50 |
2,85 |
3,71 |
|
4,85 |
5,74 |
7,05 |
8,15 |
||
0,30 |
2,57 |
3,01 |
3,52 |
4,82 |
|
6,60 |
8,14 |
10,5 |
12,3 |
||
Тяговый фактор двухбарабанного привода конвейера с раздель-
ным приводом барабанов находится как:
А = еµα (Кр + 1) – Кр,
где Кр – коэффициент распределения тягового усилия между барабанами, равный отношению установленных мощностей двигателей первого N1 и второго N2 по ходу движения ленты барабанов:
5
Кр = N1/N2, если конвейер работает в двигательном режиме, Кр = N2/N1, если конвейер работает в тормозном режиме;
еµα – тяговый фактор барабана, расположенного в зоне меньшего натяжения ленты, т.е. тяговый фактор второго барабана для двигательного режима и первого – для тормозного режима (подставляется угол обхвата α соответствующего барабана).
Для конвейеров, имеющих трехбарабанный привод, тяговый фактор рассчитывают в два приема.
Сначала определяются тяговый фактор второго и третьего барабанов А1 = еµα3(К′р + 1) – К′р,
где К′р = N2/N3.
В свою очередь, N3 и α3 – мощность привода и угол обхвата третьего барабана.
Полный тяговый фактор трехбарабанного привода равен А = А1(К′′р + 1) – К′′р, где К′′р= N1/(N2+N3).
2. ТЯГОВЫЙ РАСЧЕТ КОНВЕЙЕРА Тяговый расчет начинают с вычерчивания схемы конвейера, где
на схеме запасовки ленты на барабанах необходимо изобразить приводные и отклоняющие барабаны (с приводными блоками), расположение натяжных и загрузочных устройств. Далее составляют табл. 5 с принятыми и рассчитанными данными. В таблице обязательно делают ссылки на литературные источники, по которым были приняты те или иные величины, а также на собственные расчеты, предшествовавшие заполнению таблицы.
Исходные данные для тягового расчета конвейера |
Таблица 5 |
|||
|
||||
Показатели |
Обозна- |
Численные |
Ссылки на |
|
чение |
значения |
источник |
||
|
||||
Производительность конвейера, т/ч |
Qэ |
|
|
|
Скорость движения ленты, м/с |
v |
|
|
|
Мощность двигателя привода, кВт |
Nдв |
|
|
|
Количество двигателей в приводе, шт. |
nдв |
|
|
|
Погонная масса груза, кг/м |
q |
|
|
|
Угол наклона конвейера, град |
β |
|
|
|
Длина конвейера, м |
L |
|
|
|
Тип ленты |
|
|
|
|
Ширина ленты, м |
В |
|
|
|
Масса 1 м2 ленты |
mл |
|
|
|
6
Продолжение табл. 5
Показатели |
Обозна- |
Численные |
Ссылки на |
|
чение |
значения |
источник |
||
|
||||
|
|
|
|
|
Погонная масса ленты, кг/м |
qл |
|
|
|
Масса вращающихся частей ролико- |
mр′ |
|
|
|
опор на груженой ветви, кг |
|
|
|
|
Масса вращающихся частей ролико- |
mр′′ |
|
|
|
опор на порожней ветви, кг |
|
|
|
|
Расстояние между роликоопорами |
lр′ |
|
|
|
груженой ветви ленты, м |
|
|
|
|
Расстояние между роликоопорами по- |
lр′′ |
|
|
|
рожней ветви ленты, м |
|
|
|
|
Погонная масса роликов на груженой |
qр′ |
|
|
|
ветви, кг/м |
|
|
|
|
Погонная масса роликов на порожней |
qр′′ |
|
|
|
ветви, кг/м |
|
|
|
|
Тяговый фактор привода конвейера |
А |
|
|
При тяговом расчете конвейера методом обхода по контуру натяжение ленты в каждой последующей по ходу точке контура Sn (Н) принимается равным натяжению в предыдущей Sn-1 плюс сумма сопротивлений на участках между этими точками.
Общее сопротивление движению ленты конвейера Wо (Н), равное полному тяговому усилию привода Fо (Н), определяется как сумма распределенных и сосредоточенных сопротивлений, имеющихся по трассе конвейера:
Wо = Fo = Wв + Wн + Wб + Wкр + Wзаг + Wраз + Wоч,
где Wв, Wн – сопротивления движению ленты на прямолинейных участках соответственно грузовой (верхней) и порожняковой (нижней) ветвей, Н; Wб – сопротивления на отклоняющих или поворотных барабанах, Н; Wкр – сопротивления движению ленты на криволинейных участках, Н; Wзаг – сопротивления в месте загрузки ленты транспортируемым грузом, Н; Wраз – сопротивления, возникающие от разгрузки ленты, Н; Wоч – сопротивления очистных устройств, Н.
Сопротивления движению ленты на прямолинейных участках конвейера определяют из выражений:
для грузовой (верхней) ветви
Wв = [(q + qл + qр′) ω′сosβ ± (q + qл) sinβ] L g,
для порожняковой (нижней) ветви
Wн = [(qл + qр′′) ω′cosβ ± qл sinβ] L g,
7
где ω′ – коэффициент сопротивления движению ленты, значения которого приведены в табл. 6 и регламентированы в зависимости от длины конвейера L (м) и ширины ленты В (м); g – ускорение свободного падения (м/с2); ± -знаки, принимаемые в зависимости от направления движения ветвей конвейера, «+» – если рассматриваемая ветвь движется вверх и « – » – если рассматриваемая ветвь движется вниз.
Таблица 6 Значения эквивалентного коэффициента сопротивления
движению ленты ω′
Ширина ленты |
Значения эквивалентного коэффициента сопротив- |
||
ления движению ленты ω′ в зависимости от длины |
|||
В, м |
конвейера |
L, м |
|
|
L > 200 |
|
L ≤ 200 |
В = 0,8 |
0,04 |
|
0,05 |
В >0,8 |
0,035 |
|
0,04 |
Сопротивления движению (Н) при огибании лентой поворотного или отклоняющего барабана Wб, или при огибании роликовой батареи выпуклостью вверх Wкр определяют, соответственно, как:
Wб = Sн(k1 – 1),
Wкр = Sн(k2 – 1) = Sн(eωψ – 1)
где Sн – натяжение набегающей ветви; k1 и k2 – обобщенные коэффициенты сопротивления (принимают по табл. 7); е = 2,72 – основание натуральных логарифмов; ψ – центральный угол криволинейного участка, рад.
|
|
|
Таблица 7 |
|
Значения обобщенных коэффициентов сопротивления |
||||
|
Угол обхвата барабана |
Значение коэффициентов для |
||
Коэффициент |
или роликовой батареи, |
условий работы |
||
|
град |
тяжелых |
очень тяжелых |
|
k1 |
<90 |
1,03 |
1,04 |
|
90 |
1,04 |
1,05 |
||
|
180 |
1,05 |
1,06 |
|
k2 |
<15 |
1,05 |
1,05 |
|
15 – 30 |
1,05 |
1,06 |
||
|
||||
Сопротивления движению (Н) в месте загрузки конвейера: Wзаг= 0,1q(vо2- v12)g + f hб2 gγlб k3 + k4 lб,

8
где f – коэффициент трения груза о стенки металлических бортов (при расчете можно принимать: для угля f = 0,35-0,40; для сухой породы f = 0,5-0,6; для влажной породы f = 0,8-0,9); lб – длина загрузочных бортов, м; k3 = 0,6-0,9 – коэффициент бокового давления; k4 – удельное сопротивление трению уплотнительных резиновых полос о
ленту (при В<1,0 м k4 = 30-50 Н/м; при В>1,0 м k4 = 60-100 Н/м); v1 –
проекция скорости движения груза на направление движения ленты, м/с; hб – высота борта, м.
v1= сosβв√vн2 + 2qhв(1 – f сtgβв),
где vн –составляющая начальной скорости поступления груза на наклонную стенку воронки, направленная вдоль наклонной стенки скольжения груза, м/с; hв – высота наклонной стенки воронки, м; βв – угол наклона стенки воронки, по которой груз поступает на конвейер (по отношению к расположению ленты), град.
В практических расчетах значение (vо2-v12) в формуле можно принимать от 2 (при hв = 1 м) до 10 м2/с2 (при hв = 10 м).
Сопротивления движению (Н) в месте разгрузки ленты (за исключением концевого разгрузочного барабана):
на разгрузочной тележке
Wраз = 3000В2;
на сбрасывающем плужке
Wраз = q(1,5В + 0,2)g.
Сопротивление движению (Н) в месте очистительного устройства: скребкового типа (скребки и плужки):
Wоч = pс.оВ,
где pс.о = 300-500 Н/м – удельное сопротивление очистки (меньшие значения принимают для неабразивного сухого груза, большие – для влажного абразивного и липкого груза);
щеточного типа с собственным приводом:
Wоч = 0,2pщ vщВ,
где vщ – окружная скорость щетки очистителя, м/с; pщ – удельное сопротивление очистителя (для сухих и влажных, но не липких грузов pщ = 200-250 Н/м; для влажных и липких pщ = 300-350 Н/м).
При выполнении тягового расчета по укрупненным показателям
все местные сопротивления (Wб, Wкр, Wзаг, Wраз, Wоч), действующие на ветвях конвейера, можно учесть с помощью обобщенного коэффи-
циента kо, учитывающего в целом эти дополнительные сопротивления, значения которого принимают по табл.8.
9
Таблица 8 Значения коэффициента ko в зависимости от длины конвейера L
ko |
4,5 |
3,2 |
2,8 |
2,4 |
1,9 |
1,75 |
1,5 |
1,4 |
1,3 |
1,1 |
L, м |
10 |
20 |
30 |
50 |
80 |
100 |
200 |
300 |
500 |
≥1000 |
В этом случае сопротивления движению ленты на грузовой и порожняковой ветвях определят, соответственно, как:
Wгр = koWв = ko [(q + qл + qр′) ω′ сosβ ± (q + qл) sinβ] L g; Wпор = koWн = ko[(qл + qр′′) ω′ cosβ ± qл sinβ] L g.
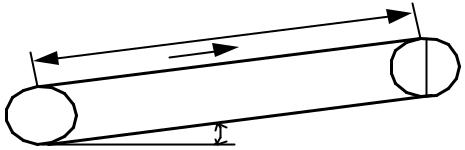
Тогда расчетная схема конвейера будет представлена в виде тягового контура, содержащего один приводной и один концевой барабаны (независимо от реального их количества), а характерных точек контура будет четыре, начиная с первой – точки сбегания тягового органа с приводного барабана. Остальные точки нумеруются по ходу движения ленты.
L |
4 |
3 
 1
1
â
2
Рис. 1. Тяговый контур конвейера
Условие исключения пробуксовки ленты на приводных барабанах выполняется, если минимальное натяжение ленты у привода равно:
для горизонтальных или уклонных конвейеров, привод которых работает в двигательном режиме (тяговое усилие привода Fo которых положительно):
Sсб.min ≥ Fо kтс/(А – 1),
где Fo = Wгр + Wпор – тяговое усилие привода;
kтс – коэффициент запаса тяговой способности привода для обеспечения пуска и торможения конвейера без пробуксовки.
Для конвейеров, привод которых работает во всех режимах загрузки в двигательном режиме, он принимается равным: