

А.Г. Изместьев Уравнивание геодезических построений параметрическим способом
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение высшего профессионального образования
"КУЗБАССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ"
Кафедра маркшейдерского дела и геодезии
УРАВНИВАНИЕ ГЕОДЕЗИЧЕСКИХ ПОСТРОЕНИЙ ПАРАМЕТРИЧЕСКИМ СПОСОБОМ
Методические указания для лабораторных работ по курсу "Математическая обработка результатов геодезических измерений"
для студентов специальности 311100 "Городской кадастр"
Составитель А.Г. Изместьев
Утверждены на заседании кафедры Протокол № 56 от 29.11.02 Рекомендованы к печати учебно-методической комиссией специальности 311100 Протокол № 24 от 03.12.02 Электронная копия находится в библиотеке главного корпуса ГУ КузГТУ
Кемерово 2003
1
Лабораторная работа № 3
УРАВНИВАНИЕ НИВЕЛИРНОЙ СЕТИ ПАРАМЕТРИЧЕСКИМ СПОСОБОМ
Цель работы: освоить методику уравнивания нивелирной сети параметрическим способом.
1. Содержание работы: выполнить уравнивание нивелирной сети параметрическим способом согласно заданному варианту (табл. 1) и схеме сети.
Уравнивание выполнить в такой последовательности:
1.1.Выбрать необходимые параметры, число которых должно быть равно числу определяемых неизвестных.
1.2.Составить исходные уравнения связи (по числу ходов):
Y = f ( X1, X2, …, Xk) , |
(1.1) |
где Yz – вектор измерений; Хj – неизвестные параметры; k – число необходимых параметров.
1.3. Найти вектор приближенных значений неизвестных с помощью измеренных превышений:
X0 =(X0 |
, X0 |
,...,X |
) |
, |
(1.2) |
1 |
2 |
k |
|
где X0j – приближенные значения отметок узловых пунктов. 1.4. Составить параметрические уравнения поправок:
vi = δхкон – δхнач + li , |
(1.3) |
где vi – поправка в измеренное превышение; δx – поправка в приближенное значение высоты определяемого узлового пункта; li –свободный член.
2
1.5. Вычислить свободные члены:
li = f (X0) – yi = X0кон – (X0нач + yi), |
(1.4) |
где yi – измеренное превышение.
1.6. Составить систему нормальных уравнений:
АTрА δX + АTрL = Nn δX + b = 0 , |
(1.5) |
где Nn – матрица коэффициентов нормальных уравнений (табл. 3); δX – вектор поправок в приближенные значения высот определяемых пунктов; b – вектор свободных членов (табл. 3).
Уравнения составить по способу узлов В.В. Попова, изложенному в лекции.
Веса назначить по формуле
Pi = 4/Li , |
(1.6) |
где Li – длина i-го хода.
1.7. Решить систему нормальных уравнений по сокращенной схеме Гаусса (табл. 4). В матричном виде это решение выглядит следующим образом:
δX = −N n−1 AT PL , |
(1.7) |
где −N-1n – обратная матрица; АT – транспонированная матрица; Р – матрица весов; L – вектор свободных членов.
1.8.Вычислить поправки по формуле (1.3) (табл. 3).
1.9.Вычислить уравненные значения превышений:
Ỹj = Yj + vj , |
(1.8) |
где Ỹj – вектор уравненных значений превышений (табл. 2). Вычислить отметки узловых пунктов:
3 |
|
~ |
(1.9) |
X j = X0j + δxj , |
~
где X j – вектор уравненных значений отметок.
1.10. Выполнить заключительный контроль уравнивания путем
~
подстановки значений X j в уравнения (1.1) вместо истинных значений
искомых параметров Xj.
Контроли на промежуточных и заключительных этапах вычислений осуществить методом сумм (табл. 3, 4). Контроли заключаются в соблюдении равенств
[a] + [b] + … +[q] + [l] = [s] ,
ai + bi + … +qi + li = si ,
далее
[paa] + [pab] + … +[paq] +[pal] = [pas] ,
…… … … …
[pas] + [pbs] + … + [pqs] + [pls] = [pss];
[pv2] = [pvl] = [pls] = [pll] + [bδx] = [pllk] = [plsk] = [pssk].
Коэффициенты нормальных и эквивалентных уравнений вычислить с точностью до 0,001, а коэффициенты элиминационных уравнений и сами неизвестные – с точностью до 0,0001. Расхождения в контрольных суммах не должны превышать 0,02.
Отчет оформить на отдельных листах формата 210 x 297 мм. Время на выполнение лабораторной работы − 3 часа.
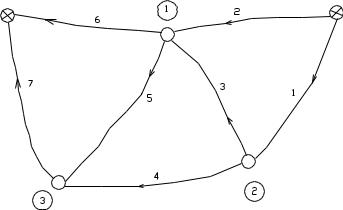
СХЕМА НИВЕЛИРНОЙ СЕТИ
Гр. рп. 2 (А)
Ст. м. 1 (В) H=540,111 м H=545,637 м
4
|
|
|
|
Исходные данные |
Таблица 1 |
||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Номер |
ходов |
Наз- |
Превы- |
Длина |
Превы- |
Длина |
Превы- |
Длина |
|
вание |
шение |
L, км |
шение |
L, км |
шение |
L, км |
|||
ходов |
h, м |
|
h, м |
|
h, м |
|
|
||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Вариант |
1 |
Вариант 2 |
Вариант 3 |
|
||
1 |
|
2-3 |
−2,639 |
6,4 |
−2,758 |
4,2 |
−5,689 |
7,0 |
|
2 |
|
2-4 |
+5,321 |
7,2 |
+4,396 |
7,3 |
+2,547 |
9,1 |
|
3 |
|
3-4 |
+7,992 |
3,5 |
+7,196 |
5,6 |
+8,287 |
6,3 |
|
4 |
|
3-5 |
+4,562 |
7,5 |
+6,205 |
8,2 |
+4,625 |
9,6 |
|
5 |
|
4-5 |
−3,455 |
4,5 |
−1,022 |
4,8 |
−3,703 |
5,8 |
|
6 |
|
4-1 |
+0,181 |
5,2 |
+1,102 |
6,0 |
+2,959 |
6,5 |
|
7 |
|
5-1 |
+3,624 |
6,4 |
+2,103 |
7,5 |
+6,629 |
8,8 |
|
|
|
|
Вариант |
4 |
Вариант 5 |
Вариант 6 |
|||
|
|
|
|
|
|
|
|
|
|
1 |
|
2-3 |
−8,236 |
8,6 |
−6,283 |
5,6 |
−8,243 |
8,4 |
|
2 |
|
2-4 |
+4,088 |
12,3 |
+3,102 |
6,9 |
+1,967 |
7,2 |
|
3 |
|
3-4 |
+12,371 |
7,1 |
+9,352 |
4,3 |
+10,169 |
6,3 |
|
4 |
|
3-5 |
+6,954 |
10,6 |
+5,628 |
7,8 |
+2,741 |
9,4 |
|
5 |
|
4-5 |
−5,441 |
9,0 |
−3,681 |
5,6 |
−7,396 |
7,8 |
|
6 |
|
4-1 |
+1,406 |
11,0 |
+2,451 |
4,3 |
+3,571 |
9,6 |
|
7 |
|
5-1 |
+6,829 |
9,8 |
+6,157 |
6,7 |
+11,003 |
8,0 |
|
|
|
|
Вариант |
7 |
Вариант 8 |
Вариант 9 |
|||
|
|
|
|
|
|
|
|
|
|
1 |
|
2-3 |
−6,183 |
3,8 |
−2,791 |
7,2 |
−4,538 |
8,1 |
|
2 |
|
2-4 |
+2,547 |
6,0 |
+5,153 |
8,5 |
+3,263 |
7,5 |
|
3 |
|
3-4 |
+8,703 |
5,2 |
+7,891 |
4,8 |
+7,770 |
5,2 |
|
4 |
|
3-5 |
+3,466 |
7,3 |
+6,136 |
8,3 |
+4,574 |
8,0 |
|
5 |
|
4-5 |
-5,232 |
4,8 |
−1,718 |
6,1 |
−3,234 |
4,3 |
|
6 |
|
4-1 |
+2,996 |
6,1 |
+0,412 |
7,2 |
+2,279 |
8,7 |
|
7 |
|
5-1 |
+8,258 |
6,8 |
+2,166 |
9,1 |
+5,528 |
7,4 |
|
|
|
|
Вариант |
10 |
Вариант |
11 |
Вариант 12 |
||
|
|
|
|
|
|
|
|
|
|
1 |
|
2-3 |
−3,657 |
10,5 |
−4,927 |
6,9 |
−5,329 |
15,3 |
|
2 |
|
2-4 |
+4,729 |
12,8 |
+5,012 |
5,4 |
+2,671 |
12,9 |
|
3 |
|
3-4 |
+8,428 |
8,0 |
+9,913 |
4,0 |
+8,017 |
9,8 |
|
4 |
|
3-5 |
+5,543 |
11,6 |
+6,895 |
8,4 |
+2,559 |
14,5 |
|
5 |
|
4-5 |
−2,842 |
6,9 |
−3,044 |
5,6 |
−5,417 |
8,6 |
|
6 |
|
4-1 |
+0,768 |
10,1 |
+0,548 |
9,1 |
+2,820 |
14,5 |
|
7 |
|
5-1 |
+3,593 |
9,7 |
+3,620 |
7,3 |
+8,217 |
12,7 |
|
5
Продолжение табл. 1
Номер ходов |
Наз- |
Превы- |
Дли- |
Превы- |
Длина |
Превы- |
Длина |
ходов |
h, м |
L, км |
h, м |
L, км |
h, м |
L, км |
|
|
вание |
шение |
на |
шение |
шение |
||
|
|
|
|
|
|
|
|
|
|
Вариант |
13 |
Вариант |
14 |
Вариант 15 |
|
1 |
2-3 |
−6,893 |
9,1 |
−7,659 |
6,2 |
−8,693 |
7,5 |
2 |
2-4 |
+1,948 |
6,2 |
+0,986 |
5,3 |
+4,767 |
8,2 |
3 |
3-4 |
+8,796 |
4,8 |
+8,671 |
4,5 |
+13,434 |
5,1 |
4 |
3-5 |
+3,548 |
7,4 |
+4,516 |
7,8 |
+9,547 |
6,7 |
5 |
4-5 |
−5,219 |
5,9 |
−4,198 |
5,4 |
−3,855 |
3,8 |
6 |
4-1 |
+3,616 |
8,0 |
+4,501 |
8,7 |
+0,773 |
9,0 |
7 |
5-1 |
+8,867 |
6,3 |
+8,673 |
7,6 |
+4,641 |
6,9 |
|
|
Вариант |
16 |
Вариант |
17 |
Вариант 18 |
|
1 |
2-3 |
−4,568 |
9,1 |
−3,762 |
6,9 |
−6,072 |
7,8 |
2 |
2-4 |
+5,219 |
8,5 |
+3,275 |
6,0 |
+2,693 |
6,2 |
3 |
3-4 |
+9,832 |
6,2 |
+6,986 |
4,3 |
+8,798 |
5,0 |
4 |
3-5 |
+7,673 |
7,4 |
+2,514 |
7,0 |
+3,626 |
9,0 |
5 |
4-5 |
−2,187 |
4,6 |
−4,442 |
3,4 |
−5,191 |
4,6 |
6 |
4-1 |
+0,285 |
8,3 |
+2,284 |
8,1 |
+2,807 |
7,1 |
7 |
5-1 |
+2,461 |
6,7 |
+6,749 |
7,6 |
+7,987 |
6,8 |
|
|
Вариант |
19 |
Вариант |
20 |
|
|
1 |
2-3 |
−8,901 |
12,1 |
−4,249 |
10,1 |
|
|
2 |
2-4 |
+1,798 |
10,9 |
+5,391 |
9,4 |
|
|
3 |
3-4 |
+10,663 |
7,2 |
+9,600 |
5,8 |
|
|
4 |
3-5 |
+4,139 |
8,0 |
+5,740 |
7,2 |
|
|
5 |
4-5 |
−6,500 |
6,3 |
−3,886 |
4,1 |
|
|
6 |
4-1 |
+3,767 |
9,3 |
+0,166 |
8,9 |
|
|
7 |
5-1 |
+10,294 |
8,1 |
+3,993 |
7,3 |
|
|
2. Контрольный пример вычисления на калькуляторе для варианта №5 Таблица 2
Исходные данные и результаты уравнивания
Номер хода |
Превышение, м |
Длина хода, км |
V, мм |
Уравненное |
превышение, м |
||||
1 |
−6,283 |
5,6 |
+9,4 |
− |
|
6,2736 |
|||
2 |
+3,102 |
6,9 |
−26,8 |
+3,0752 |
3 |
+9,352 |
4,3 |
−3,2 |
+9,3498 |
4 |
+5,628 |
7,8 |
+19,0 |
+5,6470 |
5 |
− |
5,6 |
−20,8 |
− |
|
3,681 |
|
3,7018 |
|
6 |
+2,451 |
4,3 |
−4,2 |
+2,4468 |
7 |
+6,157 |
6,7 |
−8,4 |
+6,1486 |
6
В качестве неизвестных параметров выберем отметки узловых пунктов 1, 2, 3 (на схеме отмечены кружком), равные X1, X2 и X3 соот-
ветственно. |
|
|
Составим исходные уравнения связи: |
|
|
Y1 = X2 – HA ; |
Y4 = X3 – X2 ; |
Y6 = HB – X1 ; |
Y2 = X1 – HA ; |
Y5 = X3 – X1.; |
Y7 = HB – X3 . |
Y3 = X1 – X2 ; |
|
|
Вычислим приближенные значения неизвестных:
X10 = НА + Y2 = 540,115 + 3,102 = 543,217 ;
X 20 = HA + Y1 = 540,115 – 6,283 = 533,832 ;
X 30 = HA + Y1 + Y4 = 540,115 – 6,283 + 5,628 = 539,460.
Составим параметрические уравнения поправок:
V1 = + δx2 |
|
+ l1 ; |
V2 = + δх1 |
|
+ l2 ; |
V3 = +δx1 – δx2 |
+ l3 ; |
|
V4 = – δx2 + δx3 + l4 ; |
||
V5 = – δx1 |
|
+ δx3 + l5 ; |
V6 = – δx1 |
|
+ l6 ; |
V7 = |
– δx3 + l7 . |
|
Вычислим свободные члены li по известным приближенным значениям:
l1 = X 20 – Y1 – HA = 533,832 |
+ 6,283 – 540,115 = 0; |
|
l2 |
= X10 – Y2 – HA = 543,217 |
– 3,102 – 540,115 = 0; |
l3 |
= X10 –Y3 – X 20 = 543,217 – 9,352 – 533,832 = +3,3 см; |
|
l4 |
= X 30 – X 20 – Y4 |
= 539,460 – 533,832 |
– 5,628 = 0; |
l5 |
= X 30 – X10 – Y5 |
= 539,460 – 543,217 |
+ 3,681 = −7,6 см; |
l6 |
= HB – X10 – Y6 = 545,637 – 543,217 – 2,451 = −3,1 см; |
||
l7 |
= HB – X 30 – Y7 = 545,637 – 539,460 – 6,157 = +2,0 см . |
||
Составим систему нормальных уравнений (табл. 3):
+3,150 δх1 |
– 0,930 δх2 |
– 0,710 δх3 +11,348 = 0; |
||
−0,930 δх1 |
+ 2,150 δх2 – 0,510 |
δх3 |
– 3,069 = 0; |
|
−0,710 δх1 |
– 0,510 δх2 |
+ 1,820 |
δх3 |
– 6,596 = 0. |
7
Таблица 3
Коэффициенты нормальных уравнений
№ |
a] |
b] |
c] |
l] |
|
s] |
P=4/l |
|
v см |
Pv2 |
Plv |
||||
ход |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
+ 1 |
0 |
0 |
|
+1,0 |
0,71 |
+0,94 |
|
0,627 |
0 |
||||
2 |
+1 |
0 |
0 |
0 |
|
+1,0 |
0,58 |
|
−2,68 |
4,166 |
0 |
||||
3 |
+1 |
−1 |
0 |
+3,3 |
|
+3,3 |
0,93 |
|
−0,32 |
0,095 |
−0,982 |
||||
4 |
0 |
−1 |
+1 |
0 |
|
− |
0 |
0,51 |
+1,90 |
|
1,841 |
0 |
|||
5 |
− |
1 |
0 |
+1 |
− |
|
7,6 |
0,71 |
|
− |
3,072 |
+11,224 |
|||
|
0 |
7,6 |
|
|
2,08 |
|
|||||||||
6 |
−1 |
0 |
−3,1 |
|
−4,1 |
0,93 |
|
−0,42 |
0,164 |
+1,211 |
|||||
7 |
0 |
0 |
−1 |
+2,0 |
|
+1,0 |
0,60 |
|
−0,84 |
0,423 |
−1,008 |
||||
∑ |
0 |
−1 |
+1 |
−5,4 |
|
−5,4 |
|
|
|
Контроль |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
[pa |
+3,15 |
−0,930 |
−0,71 |
+11,34 |
+12,85 |
+12,85 |
|
|
|
+10,38 |
+10,445 |
||||
[pb |
0 |
|
+2,150 |
0 |
8 |
8 |
|
|
8 |
|
|
|
|
8 |
|
[pc |
|
|
|
−0,51 |
− |
− |
2,359 |
− |
2,359 |
|
|
|
|
|
|
[pl |
|
|
|
3,069 |
|
|
|
|
|
|
|
||||
|
|
|
0 |
−6,596 |
−5,996 |
−5,996 |
|
|
|
|
|
||||
|
|
|
|
1,820 |
+62,47 |
+64,15 |
+64,15 |
|
|
|
|
|
|||
|
|
|
|
|
5 |
8 |
|
|
8 |
|
|
|
|
|
|
Для контроля решения составим суммарное уравнение из сумм коэффициентов и свободных членов:
1,150 δх1 + 0,710 δх2 + 0,600 δх3 + 1,683 = 0.
Решим систему нормальных уравнений по сокращенной схеме Гаусса (табл. 4).
Подставим значения δх1, δх2 и δх3 в суммарное уравнение: 1,150 (−2,684) + 0,710·0,941 + 0,600·2,840 + 1,683 = +0,003.
Вычислим поправки (табл. 2) с одновременным получением кон-
трольных значений: [pv2] = 10,388; [pvl] = 10,443. В табл. 4 [pll3] = = 10,392; [pls3] = 10,392. По формуле [pv2] = [pll]+ [bδx] = 62,475 – − 11,348·2,684 – 3,069 0,941 – 6,596 2,840 = 10,396.
Вычислим уравненные значения измерений (табл. 2) и отметок узловых пунктов:
~ |
0 |
– δх1 = 543,217 м – 26,8 |
мм = 543,1902 м; |
X1 |
= X1 |
||
~ |
0 |
+ δх2 = 533,832 м + 9,4 |
мм = 533,8414 м; |
X 2 |
= X 2 |
||
~ |
0 |
+ δх3 = 539,460 м + 28,4 мм = 539,4884 м. |
|
X 3 |
= X 3 |
||
8
Выполним заключительный контроль уравнивания:
|
~ |
– НА = 533,8414 – 540,1150 = −6,2736 м; |
|
Ỹ1 = X 2 |
|||
|
~ |
– НА = 543,1902 – 540,1150 = +3,0752 м; |
|
Ỹ2 = X1 |
|||
|
~ |
~ |
= 543,1902 – 533,8414 = +9,3498 м; |
Ỹ3 = X1 |
– X 2 |
||
Ỹ4 |
~ |
– Х2 = 539,4884 – 533,8414 = +5,6470 м; |
|
= X3 |
|||
Ỹ5 |
~ |
– Х1 = 539,4884 – 543,1902 = −3,7018 м; |
|
= X3 |
|||
Ỹ6 |
= НВ |
~ |
= 545,6370 – 543,1092 = +2,4468 м; |
– X1 |
|||
Ỹ7 |
|
~ |
= 545,6370 – 539,4884 = +6,1486 м. |
= НВ – X3 |
|||
Таблица 4 Ведомость решения нормальных уравнений
δ x1 |
δ x2 |
δ x3 |
l |
S |
Кон- |
|
|
|
|
|
троль |
+3,150 |
−0,930 |
0,710 |
+11,248 |
+12,858 |
+12,858 |
−1 |
+0,2952 |
+0,2254 |
−3,6025 |
−4,0819 |
−4,0819 |
|
+2,150 |
0,510 |
−3,069 |
−2,359 |
−2,359 |
|
+1,875 |
−0,720 |
+0,281 |
+1,437 |
+1,436 |
|
−1 |
+0,3840 |
−0,1499 |
−0,7664 |
−0,7659 |
|
|
+1,820 |
−6,559 |
−5,996 |
−5,996 |
|
|
−1,384 |
−3,930 |
−2,546 |
−2,546 |
|
|
−1 |
+2,8396 |
+1,8396 |
+1,8396 |
|
|
|
+62,475 |
+64,158 |
+64,158 |
δ x1 |
δ x2 |
δ x3 |
+10,392 |
+10,392 |
0,000 |
−2,684 |
+0,941 |
+2,840 |
|
|
|

9
Лабораторная работа № 4
УРАВНИВАНИЕ ДИРЕКЦИОННЫХ УГЛОВ СТОРОН КАК ЭЛЕМЕНТА ПЛАНОВОЙ ГЕОДЕЗИЧЕСКОЙ СЕТИ ПАРАМЕТРИЧЕСКИМ СПОСОБОМ
Цель работы: освоить методику уравнивания плановой геодезической сети параметрическим способом.
1. Содержание работы: выполнить уравнивание дирекционных углов сторон параметрическим способом согласно заданному варианту (табл. 5) и схеме сети.
Уравнивание выполнить в такой последовательности: 1.1. Выбрать необходимые параметры или вектор:
|
Х1 |
|
X = |
X 2 |
(1.1) |
|
... , |
Хn
где Xj – дирекционные углы.
1.2.Составить исходные уравнения связи (по числу измерений):
Y = f (x1 , x2 ,..., xk ) , |
(1.2) |
где Y − вектор измерений.
1.3. Найти вектор приближённых значений неизвестных с помощью измеренных углов:
X 0 = ( X10 , X 20 ,..., X n0 ) , |
(1.3) |
где X 0j − приближённые значения дирекционных углов. |
|
1.4. Составить параметрические уравнения поправок: |
|
V = AδX + L , |
(1.4) |