

В.Н. Ермак Измерение сил и крутящих моментов
.pdfМинистерство образования Российской Федерации
Кузбасский государственный технический университет
Кафедра прикладной механики
ИЗМЕРЕНИЕ СИЛ И КРУТЯЩИХ МОМЕНТОВ
Методические указания
клабораторной работе по теории механизмов и машин для студентов направлений 552900, 551800, 551400
Составитель В.Н. Ермак
Утверждены на заседании кафедры Протокол № 3 от 19.11.99
Рекомендованы к печати методической комиссией направления 552900 Протокол № 245 от 05.01.00
Электронная копия хранится в библиотеке главного корпуса КузГТУ
Кемерово 2000
1
Цель и содержание работы
Цель работы - изучение экспериментальных методов определения динамических параметров машин.
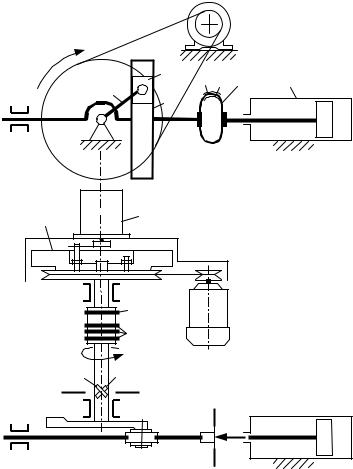
Динамические параметры определяются на установке ТММ2А, известной по работе “Измерение перемещений, скоростей и ускорений”. В текущей работе снимаются осциллограммы:
силы F – в сечении a-a ползуна (рис. 1); момента М – на валу кривошипа, в сечении b-b; угловой скорости ω кривошипа.
Снятию осциллограмм предшествует тарировка датчиков силы и момента. Осциллограммы снимаются при наличии маховика 12. Через коэффициент неравномерности δ оценивается влияние маховика на движение кривошипа. Момент М определяется также расчётным путём. Результаты расчёта и эксперимента сравниваются между собой. Работа рассчитана на 2 часа.
Описание оборудования
а)
М, ω
1 |
2 |
4 5 6 |
7 |
3 |
|
|
|
|
|
|
12  13
13
|
11 |
б) |
|
M,ω |
10 |
||
|
|||
8 |
9 |
|
|
b |
b |
|
|
|
a |
F |
a
Рис. 1. Схема установки ТММ2А
Датчиками силы и момента являются тензорезисторы 4, 5 и 8, 9, соответственно. Для повышения чувствительности тензорезисторы силы наклеены на упругое силоизмерительное кольцо 6, вставленное в разрез ползуна 3. Тензорезисторы момента наклеены непосредственно на вал кривошипа. Связь тензорезисторов момента с усилителем осуществляется через токосъёмные кольца 10.
Под номером 11 показан датчик начального положения кривошипа, под номером 13 - тахогенератор (датчик угловой скорости кривошипа). Эти два датчика известны из предыдущей работы.
2
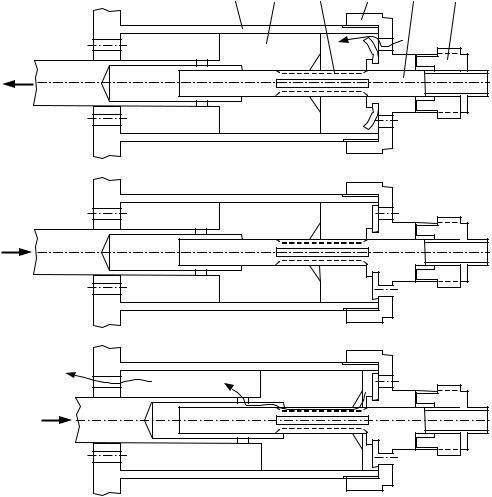
Нагрузка в установке создаётся поршневым компрессором 7. Устройство и принцип действия компрессора поясняет рис. 2.
5 6 1 2 3 4
а) |
б) |
в)
Рис. 2. Устройство и принцип действия компрессора:
а) всасывание; б) сжатие; в) сброс давления; 1 - перепускные каналы; 2 - крышка цилиндра; 3 - стержень, регулирующий степень сжатия; 4 - регулировочная гайка; 5 - цилиндр; 6 - поршень
Тарировка датчиков силы и момента
Цель тарировки - определение масштабных коэффициентов силы и момента. Тарировка состоит в следующем. На валу кривошипа создают известный тарировочный момент МТ, а на ползуне - тарировочную силу
FT (рис. 3).
На визуальном (верхнем) экране осциллографа замеряют тарировочные отклонения FT , МТ световых зайчиков силы и момента. По этим отклонениям определяют масштабные коэффициенты F, м силы и момента:
F = FT / FT , |
м = МТ / МТ . |
(1), (2) |

3
Для создания тарировочного момента на шкив 5 ремённой передачи навешивают рычаг 3 с грузом 4. При этом предварительно отсоединяют поводок тахогенератора, снимают кожух ремённой передачи и маховик (если он не снят). Чтобы кривошип не провернулся, в цилиндр
вставляют упор 7 (рис. 3, б). |
|
|
|
|
||
|
а) |
|
|
|
б) |
|
|
|
|
1 |
2 |
7 |
8 |
|
2 |
|
MT |
|
|
FT |
1 |
|
|
|
|
||
|
|
|
|
|
||
|
|
L |
|
6 |
|
|
|
3 |
5 |
|
|
|
|
|
4 |
|
|
|
||
Рис. 3. Тарировочные приспособления
Для удержания упора и измерения силы FT на место крышки цилиндра навинчивают пружинный динамометр 2 с индикатором 1. Момент МТ получают как сумму моментов от рычага и груза. Момент от рычага MR=4,1 Нм. Вес груза G=98 Н (масса - 10 кг). Рекомендуемое плечо L=0,3 м. При
этом МТ = MR + G L=4,1+ 98 0,3 34,1 Нм.
Тарировочная сила FT (рис. 3, б) рассматривается как действие поршня 8, приложенное к силоизмерительному кольцу. Величину силы FT определяют по показаниям индикатора и тарировочному графику, прилагаемому к динамометру. Индикатор показывает прогиб пластины 6. По горизонтальной оси графика отложен прогиб, по вертикальной - сила FT.
Во время тарировки на экране осциллографа оставляют: зайчик силы, зайчик момента и зайчик нулевой вставки (гнездо 16). Перед тарировкой все три зайчика сводят в одну точку, расположенную примерно в 40 мм от нижнего (для оператора) края визуального экрана. Во время съёмки нулевая вставка будет прочерчивать ось ϕ на осциллограмме. От этой оси отсчитываются сила и момент.
После установки рычага с грузом зайчики силы и момента уйдут со своих мест. Для распознавания зайчиков гальванометр одного из них прикрывают полоской бумаги.
Измерительная аппаратура настроена так, что под действием тарировочной нагрузки зайчики силы и момента уходят вверх по экрану, смещаются в положительном направлении. Если наблюдается иное, то кнопкой
|
|
4 |
|
|
“+/–” соответствующего канала тензоусилителя изменяют полярность сиг- |
||||
нала. |
|
|
|
|
При такой настройке знаки силы F и момента М на осциллограмме |
||||
(рис. 4) будут истолковываться следующим образом: положительное F |
||||
сжимает силоизмерительное кольцо, отрицательное растягивает его; |
||||
положительное М действует по ходу кривошипа (по скорости ω - рис. 1), |
||||
отрицательное - против. |
|
|
|
|
По завершении тарировки снимают динамометр, вынимают упор и |
||||
навинчивают крышку цилиндра, навешивают маховик, ставят на место |
||||
кожух ремённой передачи, подсоединяют поводок тахогенератора. |
||||
Съёмка и расшифровка осциллограмм |
|
|||
Дополнительно к зайчикам силы и момента, выставленным при та- |
||||
рировке, на экран осциллографа выводят зайчик начального положения |
||||
S0, и зайчик скорости кривошипа ω . В положении, при котором поршень |
||||
задвинут в цилиндр, оба зайчика устанавливают в 10 мм от нижнего |
||||
края визуального экрана. Зайчик S0 будет прочерчивать ось ϕ′ на осцил- |
||||
лограмме. От этой оси отсчитывается скорость ω . |
|
|||
Непосредственно перед съёмкой ещё раз совмещают зайчики силы |
||||
и момента с зайчиком нулевой вставки. Совмещение контролируют по |
||||
юстировочному экрану, расположенному сбоку осциллографа. |
|
|||
Съёмку производят при скорости протяжки 640 мм/с. Перед съёмкой |
||||
регулятор осветителя гальванометров устанавливают на отметку 5-5,5. Про- |
||||
должительность съёмки -1 секунда. В отличие от предыдущей работы, от- |
||||
метчик времени не включают. После съёмки кассету отправляют на прояв- |
||||
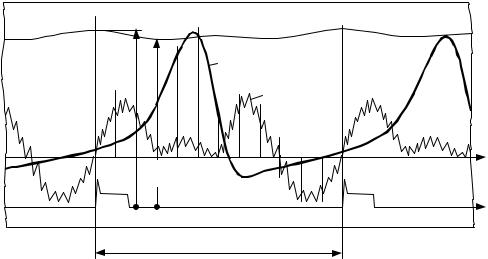
ление. Проявленная осциллограмма имеет вид, показанный на рис. 4. |
||||
µ |
F = ... |
Н/мм |
Нм /мм |
|
|
µ М = ... |
|
||
max min |
|
F |
|
|
ω ω |
|
|
M |
|
|
|
|
|
|
0 |
3 |
6 |
12 |
ϕ |
|
|
|
9 |
|
|
|
Цикл |
|
ϕ′ |
|
|
|
|
|
Рис. 4. Примерный вид и оформление осциллограммы |
||||
5
Осциллограмму режут на части, содержащие по одному циклу. Цикл разбивают на 12 равных частей. Высокая равномерность хода кривошипа, усиленная действием маховика, позволяет считать, что каждая из частей соответствует повороту кривошипа на 30° . В каждой точке разбивки измеря-
ют ординаты F силы F и вычисляют её истинные значения: |
|
F = F F . |
(3) |
Момент с осциллограммы не снимают. Его определяют расчётным путём через силу F, снятую с осциллограммы (см. следующий раздел). Расчётный момент наносят на осциллограмму (на рис. 4 этот момент не показан). Ординаты расчётного момента определяют по формуле
Мрасч. = Мрасч. / м. |
(4) |
Масштаб м расчётного момента принимают таким же, как у экспериментального момента - см. формулу (2). Равенство масштабов позволяет сравнивать моменты по их графикам. Хорошая сходимость моментов будет свидетельствовать о правильности как измерений, так и расчётов. Кроме того, расчётное определение момента позволит объяснить непонятное, на первый взгляд, поведение экспериментального момента. Результаты измерений и расчёта сводят в таблицу следующего образца.
№ полож-я |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
ϕ , град |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
360 |
F, Н |
|
|
|
|
|
|
|
|
|
|
|
|
Мрасч., Н м |
|
|
|
|
|
|
|
|
|
|
|
|
Мрасч. , мм |
|
|
|
|
|
|
|
|
|
|
|
|
Расчётное определение момента
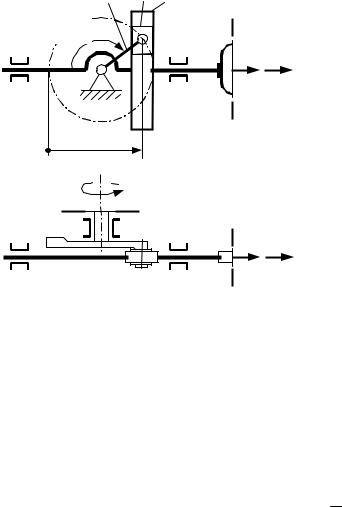
Не делая большой ошибки и существенно упрощая расчёт, считают, что момент М (рис. 5) “расходуется” на преодоление только силы F и силы инерции I ползуна 3. В действительности есть ещё силы трения и небольшой момент от сил тяжести кривошипа 1 и камня 2.
На рисунке показаны положительные проекции Fx , Ix сил F и I на ось x. Положительное осциллографное F сжимает силоизмерительное
кольцо, а положительное Fx растягивает его, поэтому |
|
Fx=–F. |
(5) |
Проекция силы инерции ползуна |
|
Ix=–m3 ax, |
(6) |
где m3 - масса той части ползуна, которая расположена левее сечения а-а. |
|
|
|
|
|
|
6 |
|
|
|
1 |
2 |
3 |
|
|
Проекция ускорения ползуна: |
|||
|
|
ax=ω 2s″ + ε s′, |
||||||
ϕ , ω , М |
|
a |
|
|
||||
|
Fx |
Ix |
где ω и ε - скорость и ускорение кри- |
|||||
|
|
|
||||||
|
|
|
вошипа; s′, s″ - производные от s по ϕ . |
|||||
|
|
a |
|
|
Учитывая, что неравномерность вра- |
|||
|
|
|
|
щения кривошипа незначительна, при- |
||||
S |
|
|
|
|
||||
|
|
|
|
нимают: ε =0, ω =ω med. (ω |
med - средняя |
|||
M,ω |
|
|
|
|
скорость кривошипа). После этого |
|||
b |
b |
|
|
|
ax=ω med2 |
s″ , |
(7) |
|
a |
F |
I |
Обозначая длину кривошипа 1 |
|||||
|
|
|||||||
|
|
a |
x |
x |
через r, из рисунка выводят: |
|||
|
|
|
|
s = r(1– cosϕ ). |
(8) |
|||
Рис. 5. Расчётная схема |
|
После двукратного |
дифферен- |
|||||
цирования s по ϕ |
получают: |
|
|
|
|
|||
|
|
s′ = – r sinϕ , |
s″ = – r cosϕ . |
|
(9), (10) |
|||
Из общего уравнения динамики следует, что сумма приведённых к |
||||||||
кривошипу моментов внешних сил и сил инерции равна нулю, т. е. |
||||||||
|
|
M + Fx s′ + Ix s′ = 0. |
|
(11) |
||||
Подставляя выражения (5)...(10), из (11) получают: |
|
|
||||||
|
|
M = F r sinϕ |
+ 1 m3 ω 2 r2 sin2ϕ . |
|
(12) |
|||
|
|
|
|
|
2 |
|
|
|
В исследуемой установке r=0,05 м, m3 =5,4 кг. Из предыдущей ра- |
||||||||
боты известно: ω |
med =42 рад /с. При таких данных |
|
|
|||||
|
|
M = 0,05 F sinϕ + 11,9 sin2ϕ . |
|
(13) |
||||
Результаты расчёта по этой формуле заносят в таблицу в графу |
||||||||
Мрасч.
Первое слагаемое формулы отражает долю силы F, второе – долю силы инерции I.
7
Порядок работы
1. Включить сеть, тензоусилитель, осциллограф, питание датчика s.
2.После 10-минутного прогрева тензоусилителя произвести тарировку датчиков силы и момента, вычислить µ F , µ м - формулы (1), (2).
3.Снять осциллограмму и проявить.
4.Определить коэффициент δ неравномерности вращения кривошипа, сравнить с полученным в предыдущей работе.
5.Снять с осциллограммы значения силы F и занести в таблицу.
6.По формуле (12) вычислить момент и построить на осциллограмме его график. Ординаты графика вычислить по формуле (4).
Техника безопасности
Не опираться на оборудование и не класть на него какие-либо предметы. Запуск установки производить только при одетом кожухе ремённой передачи, подсоединённом тахогенераторе и под наблюдением преподавателя.
Требования к отчёту
В отчёте должны быть приведены: расчётная схема (рис. 5); формулы (1)...(13); таблица значений силы и момента; осциллограмма, оформленная, как на рис. 4.
Контрольные вопросы
1. Как устроены датчики силы и момента?
2.Как производится тарировка датчиков?
3.Как повлиял маховик на коэффициент неравномерности вращения?
4.Куда направлен момент в положении 11 (или любом другом) и почему? Ответ дайте через анализ сил F и I. Силу F возьмите с осциллограммы, I вычислите по формуле (6).
Рекомендуемая литература
Левитская О. Н., Левитский Н. И. Курс теории механизмов и машин.
– М.: Высш. шк., 1985.
Составитель Владимир Николаевич Ермак
ИЗМЕРЕНИЕ СИЛ И КРУТЯЩИХ МОМЕНТОВ
Методические указания к лабораторной работе по теории механизмов и машин
для студентов направлений 552900, 551800, 551400
Редактор З. М. Савина
ЛР № 020313 от 23.12.96.
Подписано в печать 25.01.2000. Формат 60× 84/16.
Бумага офсетная. Отпечатано на ризографе. Уч.-изд. л. 0,5.
Тираж 100 экз. Заказ ...................
Кузбасский государственный технический университет. 650026, Кемерово, ул. Весенняя, 28.
Типография Кузбасского государственного технического университета.
650099, Кемерово, ул. Д. Бедного, 4а.