

В.Н. Ермак Логический синтез автомата
.pdfМинистерство образования Российской Федерации Государственное учреждение
Кузбасский государственный технический университет
Кафедра прикладной механики
ЛОГИЧЕСКИЙ СИНТЕЗ АВТОМАТА
Методические указания к лабораторной работе по теории механизмов и машин
для студентов направлений 552900, 551800, 551400
Составитель В.Н. Ермак
Утверждены на заседании кафедры Протокол № 4 от 16.05.01
Рекомендованы к печати методической комиссией направления 552900 Протокол № 10 от 26.11.01
Электронная копия хранится в библиотеке главного корпуса ГУ КузГТУ
Кемерово 2002

|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
ЦЕЛЬ И СОДЕРЖАНИЕ РАБОТЫ |
|
|
|
|
||||||
|
Цель работы – научиться строить логическую схему системы |
|||||||||||
управления машины-автомата дискретного действия. |
|
|
|
|
||||||||
|
Для этого по заданному порядку работы исполнительных орга- |
|||||||||||
нов автомата строится схема блока управления. Построенная схема |
||||||||||||
проверяется. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Работа рассчитана на 2 часа. |
|
|
|
|
|
|
|
|
|||
|
|
КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ |
|
|
|
|
||||||
|
Исполнительными органами автомата, рассматриваемого в дан- |
|||||||||||
ной работе, являются поршни пневмоцилиндров 1, 2, 3 (рис. 1). |
|
|
||||||||||
1 |
s1 |
Ц1 |
|
|
x1 |
|
|
Заданный по- |
||||
|
x1 |
|
|
|
|
рядок |
их |
работы |
||||
|
|
|
|
|
|
обеспечивает |
блок |
|||||
4 |
|
|
|
|
|
|
|
|||||
|
7 |
|
|
10 |
|
|
управления 14, ко- |
|||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
нечные |
|
выключа- |
|||
2 |
|
Ц2 |
|
|
x2 |
|
|
тели 7…12, |
пнев- |
|||
|
x2 |
|
|
|
|
моусилители |
4…6 |
|||||
|
|
|
|
|
|
и элемент |
памяти |
|||||
5 |
|
|
|
|
|
|
|
|||||
|
8 |
|
|
11 |
|
|
13. Задания на син- |
|||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
тез подобраны так, |
|||||
|
|
Ц3 |
|
|
|
|
|
|||||
3 |
|
|
|
x3 |
|
|
чтобы |
|
автомат |
|||
|
x3 |
|
12 |
|
|
имел один элемент |
||||||
6 |
|
|
|
|
|
|
памяти. |
|
|
|
|
|
|
9 |
|
|
|
|
|
Синтез |
|
сис- |
|||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
темы |
управления |
||||
|
|
|
|
|
|
|
|
|||||
|
П |
|
|
|
|
|
|
ведётся |
|
в |
четыре |
|
13 |
z |
z |
x3 |
x3 |
x2 x2 |
x1 x1 |
этапа: |
|
|
|
|
|
14 |
|
|
|
|
|
|
|
1) определение |
||||
|
|
|
|
|
|
|
входных |
сигналов |
||||
|
|
|
|
|
|
И |
|
блока управления; |
||||
|
|
|
|
|
|
И |
2) |
определение |
||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
выходныхсигналов; |
|||||
|
|
fz |
fz |
f3 |
f3 |
f2 f2 |
f1 f1 |
3) |
составление |
|||
|
|
|
|
|
|
|
|
логическихформул; |
||||
|
|
|
|
|
|
|
|
4) |
построение |
|||
|
Рис. 1. Схема автомата на пневмоэлементах |
блока управления. |
||||||||||

2
Определение входных сигналов блока управления
Входными являются сигналы x1 , x2 , x3 , x1 , x2 , x3 от конечных выключателей и сигналы z, z от элемента памяти. Сигналы конечных
выключателей однозначно определяются исходной тактограммой, сигналы элемента памяти в известной мере произвольны.
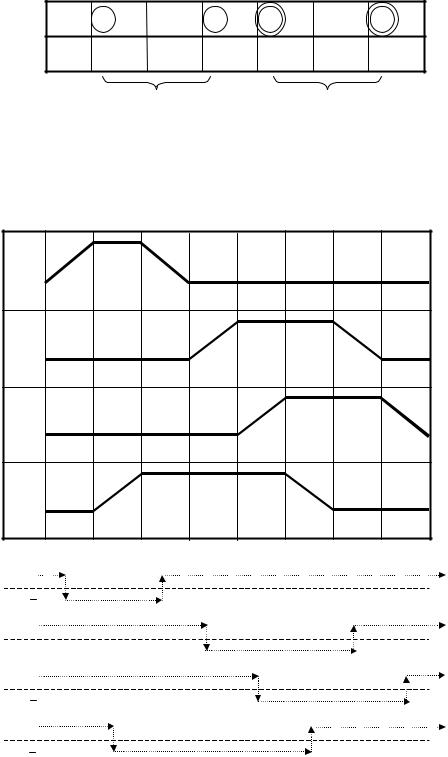
Тактограмма - это совокупность условных графиков работы исполнительных органов. Исходной является тактограмма, которая строится непосредственно по заданному порядку работы исполнительных органов. При построении исходной тактограммы сначала проводят наклонные участки графиков, затем горизонтальные. Так, если из исходного положения, показанного на рис. 1, поршни пневмоцилиндров выдвигаются и задвигаются в последовательности 1, 1, 2, 3, 2, 3, то сначала проводят участки ab, bc, de, fg, mn, pq, затем cr, ud, em и т. д. (рис. 2).
|
s1 |
t0 |
t1 |
t2 |
t3 |
t4 |
t5 |
t6 |
Ц1 |
|
b |
|
|
|
|
r |
|
a |
|
c |
|
|
|
|||
|
x1 |
0 |
1 |
0 |
0 |
0 |
0 |
20=1 |
Ц2 |
s2 |
u |
|
d |
e |
m |
n |
|
|
|
|
|
21=2 |
||||
|
x2 |
0 |
0 |
0 |
1 |
1 |
0 |
|
Ц3 |
s3 |
|
|
|
f |
g |
p |
q |
|
|
|
|
|
|
|||
|
x3 |
0 |
0 |
0 |
0 |
1 |
1 |
22=4 |
ИЧ |
|
0 |
1 |
0 |
2 |
6 |
4 |
|
z |
|
0 |
|
1 |
|
|
|
0 |
|
|
|
A |
|
|
B |
|
|
|
Рис.2. Определение входных сигналов |
|||||||
Восходящие участки графиков соответствуют выдвижению поршней, нисходящие - возвращению. Входные сигналы проставляют непосредственно на тактограмме. В силу взаимной инверсности сигналов от левых и правых конечных выключателей проставляют сигналы только от правых выключателей - x1, x2, x3. При этом руководствуются следующим. Если поршень задвинут, то его правый выключатель не нажат, сжатый воздух от этого выключателя в блок управления не поступает и сигнал выключателя считается равным нулю. Если поршень выдвинут, то правый выключатель нажат, сжатый воздух поступает и сигнал равен единице.
3
Совокупность сигналов x1, x2, x3 в каждый момент времени t0, t1, t2 и т. д. (эти моменты называются логическими тактами) представляет собой некоторое двоичное число x1x2x3, записанное столбиком. Это число называется информационным. При синтезе информационные числа (ИЧ) сопоставляют между собой, чтобы выявить совпадающие. Для удобства сопоставления двоичные числа преобразуют в более компактные десятичные. Это делают следующим образом.
Полагая, что x1 образует самый младший разряд двоичного числа, умножают этот разряд на два в нулевой степени. Каждый следующий разряд умножают на два в степени на единицу больше предыдущей (на рис. 2 множители показаны справа от тактограммы). Результаты умножения складывают по вертикали и записывают в строку ИЧ. Записанное и есть десятичное выражение двоичного числа.
Блок управления имеет неизменные связи между своими входами и выходами, и поэтому на одни и те же входные сигналы - одни и те же ИЧ- может реагировать только одинаково. Если реакция должна быть разной, то и входные сигналы должны быть разными. Так, судя по тактограмме, показанной на рис. 2, в ответ на ИЧ=0 в такте 0 (в момент t0), блок управления должен подать сигнал на выдвижение поршня первого цилиндра (см. участок ab тактограммы), а в ответ на то же ИЧ в такте 2, должно начаться выдвижение de во втором цилиндре, следовательно, в тактах 0 и 2 ИЧ должны быть разными.
ИЧ делают разными за счёт введения дополнительного сигнала z от устройства, называемого элементом памяти или просто памятью. При z=0 память считается выключенной, при z=1 - включённой. В тактах, где ИЧ совпадают, проставляют взаимно инверсные значения z: 0, 1 или 1, 0. На рис. 2 принят первый вариант.
Чтобы выделить промежутки времени, в которых память включается или выключается, к тактограмме пристраивают несколько тактов последующего цикла. Руководствуясь периодической повторяемостью тактограммы, проставляют в этих тактах значения z, известные по текущему циклу. В нашем случае достаточно добавить значение z только в начале следующего цикла.
Проставленные значения z делят тактограмму на две временные зоны - А и В. В зоне А память включается, в зоне В - выключается.
Переключать память можно только в тех тактах указанных зон, где значение z ещё не проставлено. Из этого следует, что включать память можно только в такте 1, а выключать - в такте 3, 4 или 5. Остановимся на такте 4.

4
На переключение памяти необходимо некоторое добавочное время t1-t′1 и t4-t′4 (рис. 3).
|
s1 |
t0 |
t1 t′1 t2 |
t3 |
t4 t′4 |
t5 |
t6 |
|
Ц1 |
|
|
|
|
|
|
|
|
x1 |
0 |
11 |
0 |
0 |
00 |
0 |
|
|
|
|
|||||||
Ц2 |
s2 |
|
|
|
|
|
|
Рис. 3. Введение тактов |
|
x2 |
0 |
00 |
0 |
1 |
11 |
0 |
переключения памяти |
Ц3 |
s3 |
|
|
|
|
|
|
|
|
x3 |
0 |
00 |
0 |
0 |
11 |
1 |
|
ИЧ |
|
0 |
1 |
0 |
2 |
6 |
4 |
0 |
z |
|
0 |
01 |
1 |
1 |
10 |
0 |
0 |
ИЧП |
0 |
1;9 |
8 |
10 |
14;6 |
4 |
|
|
Введя это время, проставляют значения z на его границах. Согласно принятому выше решению, в интервале t1-t′1 память включается и, следовательно, z меняется здесь с нуля на единицу, в интервале t4-t′4 - наоборот. От включения до выключения и обратно состояние памяти должно быть неизменным, исходя из этого, проставляют значения z в ещё незаполненных тактах.
Введение добавочных тактовt′1 иt′4 требует определения значений не только сигнала z в этих тактах, но и x1, x2, x3. Это делают на основании следующего. Во время переключения памяти все поршни стоят на месте, значения сигналов x1, x2, x3 на границах интервалов t1-t′1 и t4-t′4 остаются неизменными, поэтому двоичное число x1x2x3 =100 такта 1 копируют в 1′, а x1x2x3 =011 такта 4 копируют в 4′.
Правильность определения всех входных сигналов проверяют подсчётом информационных чисел ИЧП, учитывающих сигналы памяти. Для этого к ИЧ, найденным ранее, прибавляют значения z, умноженные на 23, т. е. на 8. При этом учитывают, что в добавочных тактах t′1, t′4 значения ИЧ такие же, как в одноимённых предшествующих тактах t1, t4 соответственно. Все ИЧП должны быть разными.
Внекоторых заданиях возможно двукратное совпадение информационных чисел. Пример такого совпадения показан на рис. 4.
Встроке ИЧ имеем два нуля и две двойки. Проставив под нулями z, равное 0 и 1, под двойками ставим 1 и 0. В противном случае, т. е. при 0 и 1, пришлось бы переключать память не только в зонах А и В, но и между
5
тактами2 и3, аэтоневозможно, т. к., согласноприведённомувышеправилу, вэтоминтерваленетниодноготактаснепроставленнымзначениемz.
0 |
1 |
2 |
3 |
4 |
5 |
6 |
ИЧ 0 |
1 |
0 |
2 |
6 |
2 |
|
z 0 |
|
1 |
1 |
|
0 |
|
АВ
Рис. 4. Двукратное совпадение информационных чисел
Значения сигналов x1, x2, x3, z, найденные по рис. 3, переписывают затем в расширенную тактограмму (рис. 5, а).
|
0 |
1 |
1′ |
2 |
3 |
4 |
4′ |
5 |
6 |
x1 |
0 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
|
x2 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
а) |
|
|
|
|
|
|
|
|
|
|
x3 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
|
z |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
|
f1 |
1 |
|
0 |
0 |
0 |
0 |
0 |
0 |
|
||
f1 |
|
0 |
0 |
1 |
|
|
|
|
|
|
|
f2 |
0 |
0 |
0 |
1 |
|
|
0 |
0 |
б) |
||
f |
|
|
|
|
|
0 |
0 |
0 |
1 |
|
|
2 |
|
|
|
|
|
|
|||||
f3 |
0 |
0 |
0 |
0 |
1 |
|
|
0 |
|
||
f3 |
|
|
|
|
|
0 |
0 |
0 |
1 |
|
|
fz |
0 |
1 |
|
|
|
0 |
0 |
0 |
|
||
fz |
|
|
0 |
0 |
0 |
0 |
1 |
|
|
|
|
Рис. 5. Входные и выходные сигналы блока управления
По значениям сигналов x1, x2, x3, z строят обновлённые графики работы исполнительных органов и элемента памяти. Там, где сигнал меняется с нуля на единицу, проводят восходящую линию графика;

6
там, где с единицы на ноль, - нисходящую. Букву t в обозначениях тактов в дальнейшем опускают. Если всё правильно, то в каждом межтактовом промежутке времени действует какой-то один орган автомата, т. е. либо движется поршень, либо переключается память.
Определение выходных сигналов блока управления
Выходными являются сигналы, обозначенные буквой f с соответствующим индексом. Сигнал fi=1 выдвигает поршень i-го цилиндра, сигнал fi =1 задвигает этот поршень; fz=1 включает память, fz =1
выключает её.
Численные значения выходных сигналов устанавливают с помощью расширенной тактограммы. Сначала заполняют те клетки таблицы выходных сигналов (рис. 5, б), в которых эти сигналы должны быть равны единице, затем те, в которых сигналы должны быть равны нулю. Так, рассматривая график работы первого цилиндра (рис. 5, а), отмечают, что в такте 0 начинается выдвижение поршня, а в такте 1′ - возвращение. Эти действия состоятся, если в такте 0 появится сжатый воздух на выходе f1 блока управления, а в такте 1′ - на выходе f1 . На
этом основании в такте 0 проставляют единицу для f1, а в такте 1′ - единицу для f1 .
Потребовав выдвижения поршня в такте 0, нельзя в то же время требовать его возвращения. Этого нельзя делать до тех пор, пока не придёт время возвращения. На этом основании в строке f1 простав-
ляют нули под f1=1 и далее «до упора» в единицу такта 1′. Эта единица означает, что пришло время возвращения поршня и, следовательно, нельзя подавать давление на выдвижение. Этого нельзя делать до тех пор, пока не придёт время выдвижения. На этом основании в строке f1 проставляют нули над f1 =1 и далее до единицы, которая, судя по те-
кущему циклу, находится в начале следующего цикла. В незаполненных клетках таблицы значения сигналов f1, f1 безразличны, поэтому здесь
ничегонепишут, соглашаясьнатесигналы, которыеполучатсясамисобой. Проставленные значения сигналов f1, f1 , располагаются на харак-
терном ломаном маршруте: его начало находится в той из двух обсуждаемых строк, которая содержит ближайшую по времени единицу; переходвсоседнююстрокупроисходитнапересечениимаршрутасединицей данной строки. Исходя из этой закономерности, заполняют остальные строки таблицывыходных сигналов.

7
Составление и упрощение логических формул
Выходные сигналы блока управления рассматриваются на данном этапе как логические функции входных сигналов, выступающих, соответственно, в роли аргументов. Для составления формул логических функций из таблиц входных и выходных сигналов (рис. 5) выписывают «рабочие» и «запрещённые» наборы численных значений аргументов.
Рабочим для данной функции fi считается тот набор численных значений аргументов x1, x2, x3, z, при котором fi=1, запрещённым - тот, при котором fi=0. Исходя из данных определений, столбец значений x1, x2, x3, z, стоящий над единичным значением той или иной функции, переносят в колонку «Рабочий набор» таблицы логических формул, а столбцы, стоящие над нулевыми значениями той же функции, переносят в раздел «Запрещённые наборы» (рис. 6).
Объект |
Фун- |
Аргу- |
|
Рабоч. |
Запрещённые на- |
Исходные форму- |
Упрощённые |
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
кция |
мент |
|
|
набор |
боры |
|
|
|
|
|
|
|
|
лы |
формулы |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
0 |
1 0 0 0 |
0 0 |
|
f1 =x1 x2 x3 z |
|
f1 =x3 z |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f1 |
x2 |
0 |
0 0 1 1 1 0 |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x3 |
0 |
0 0 0 1 |
1 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
Ц1 |
|
|
|
|
|
|
z |
0 |
1 1 1 1 |
0 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
x1 |
1 |
0 1 |
|
|
|
f |
|
|
|
|
=x1 x2 x3 z |
|
|
f |
|
|
|
=z |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
0 |
0 0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
1 |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x3 |
0 |
0 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
1 |
0 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
0 |
0 1 1 0 |
0 |
|
f 2 =x1x2 x3 z |
|
f 2 =x1 z |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f2 |
x2 |
0 |
0 0 0 1 0 |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x3 |
0 |
0 0 0 1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
Ц2 |
|
|
|
|
|
|
z |
1 |
0 0 1 0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
x1 |
0 |
0 0 0 |
|
|
f |
|
|
|
|
|
=x1 x2 x3 z |
|
|
f |
|
|
|
|
=z |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
1 |
0 1 1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
2 |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x3 |
1 |
0 0 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
0 |
1 1 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 6. Составление и упрощение логических формул на примере первого и второго цилиндров
Исходная формула для любого сигнала f записывается в виде логического произведения всех аргументов: f=x1 x2 x3 z. Над аргументами, которые в рабочем наборе равны нулю, проставляются знаки инверсии - черта сверху. Полученная формула затем упрощается. Упрощение производится путём исключения некоторых аргументов из формулы. Аргумент может быть исключён из формулы, если после

8
исключения сократившийся рабочий набор не будет совпадать ни с одним из сократившихся запрещённых.
Построение схемы блока управления
Схему блока управления строят по упрощённым формулам. Так, формула f1 = z показывает, что выход f1 блока управления соединя-
ется непосредственно с входом z (рис. 1).
Согласно формуле f2 = z , выход f2 соединяется с выходом z , и т. д. При двух аргументах, как например в формуле f1 = x3 z , выход f1 соединяется с входами x3 , z через логический элемент И. При трёх
аргументах требуется два логических элемента типа И, - по числу логических произведений. Один из этих элементов перемножает какиелибо два из трёх аргументов, другой элемент умножает результат первого элемента на оставшийся третий аргумент. В зависимости от выбора первых перемножаемых аргументов получаются три схемы соединений входов с выходом (рис. 7).
x1 |
|
|
|
x2 |
|
|
|
|
x3 |
|
x1 |
|
|
|
x2 |
|
|
|
x3 |
|
x1 |
|
|
|
|
|
x2 |
|
x3 |
|
И |
|
|
И |
И |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
И |
|
|
И |
|
|
|
|
|
|
|
И |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
f |
|
|
|
|
|
|
|
f |
|||||||||||||
Рис. 7. Варианты соединений по формуле f = x1 x2 x3
Проверка правильности схемы
Проверка состоит в мысленном воспроизведении работы автомата от начала до конца цикла. На бланке, выданном студенту, все поршни изображены в положении, соответствующем началу цикла, элемент памяти изображён в выключенном состоянии. Если расширенная тактограмма показывает, что на начало цикла память включена, то элемент памяти подразумевают находящимся в положении, при котором вход z блока управления находится под давлением. Чтобы об этом не забыть, рядом с входом z ставят стрелку, направленную к блоку управления. Когда память выключится, эту стрелку зачёркивают и ставят новую - рядом с входом z . В нашем случае, т. е. по тактограмме, изображённой на рис. 5, на начало цикла память выключена, и, следовательно, никаких пометок делать пока не надо.
По расширенной тактограмме выясняют, какое действие автомата было в цикле последним. С этого действия и начинают проверку.
9
Судя по рис. 5, последним было возвращение поршня третьего цилиндра в исходное положение (см. интервал между тактами 5, 6). Задвинувшись до конца, поршень нажимает на выключатель x3
(рис. 1), и на одноимённый вход блока управления поступает сжатый воздух. С входа x3 воздух поступает на логический элемент И. Второй
вход этого элемента соединён с z . На z давление есть, следовательно, появится давление на выходе f1 блока управления. От этого давления переместится пневмораспределитель 4, и начнёт выдвигаться поршень первого цилиндра. Это действие отмечают на схеме автомата стрелкой, направленной по движению поршня.
Обращаясь к расширенной тактограмме, выясняют, совпадает ли начавшееся действие с тем, что должно быть согласно тактограмме. Как показывает рис. 5, совпадение есть. Начавшееся действие помечают на тактограмме и продолжают проверку.
ПОРЯДОК РАБОТЫ
1.Определить входные сигналы блока управления. Для этого:
-построить исходную тактограмму;
-проставить значения сигналов x1, x2, x3;
-подсчитать информационные числа ИЧ;
-выявить и пометить совпадающие ИЧ;
-ввести сигнал z элемента памяти;
-переписать в заготовку расширенной тактограммы значения
сигналов x1, x2, x3, z;
-построить новые графики работы исполнительных органов и график для элемента памяти.
2.Определить выходные сигналы блока управления.
3.Составить логические формулы. С этой целью:
-в таблицу будущих логических формул выписать рабочие и запрещённые наборы значений входных сигналов;
-составить и упростить логические формулы.
4. Упрощённые формулы переписать в таблицу, расположенную на однойстороне со схемой автомата.
5.По упрощённым формулам построить схему блока управления.
6.Проверитьправильность работы схемы.
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
Ермак В. Н. Лекции по теории механизмов и машин. Кемерово, КузГТУ, 1999