

В.Н. Ермак Расчетные кинематические диаграммы
.pdfМинистерство образования Российской федерации
Кузбасский государственный технический университет
Кафедра прикладной механики
РАСЧЁТНЫЕ КИНЕМАТИЧЕСКИЕ ДИАГРАММЫ
Методические указания к практическим занятиям по теории механизмов и машин
для студентов направлений 552900, 551800, 551400
Составитель В.Н. Ермак
Утверждены на заседании кафедры Протокол № 8 от 29.06.99
Рекомендованы к печати методической комиссией направления 552900 Протокол № 246 от 05.01.00
Электронная копия хранится в библиотеке главного корпуса КузГТУ
Кемерово 2000
|
|
|
|
1 |
|
|
|
|
Цель и задачи занятия |
||
Целью занятия является освоение одного из аналитических |
|||||
методов кинематического анализа механизмов - метода векторных |
|||||
контуров. |
|
|
|
|
|
Для достижения этой цели предлагается рычажный механизм, для |
|||||
которого студент графическими методами уже построил три |
|||||
кинематические диаграммы. На данном занятии эти диаграммы получаются |
|||||
расчётом. |
|
|
|
|
|
|
|
Краткие сведения из теории |
|||
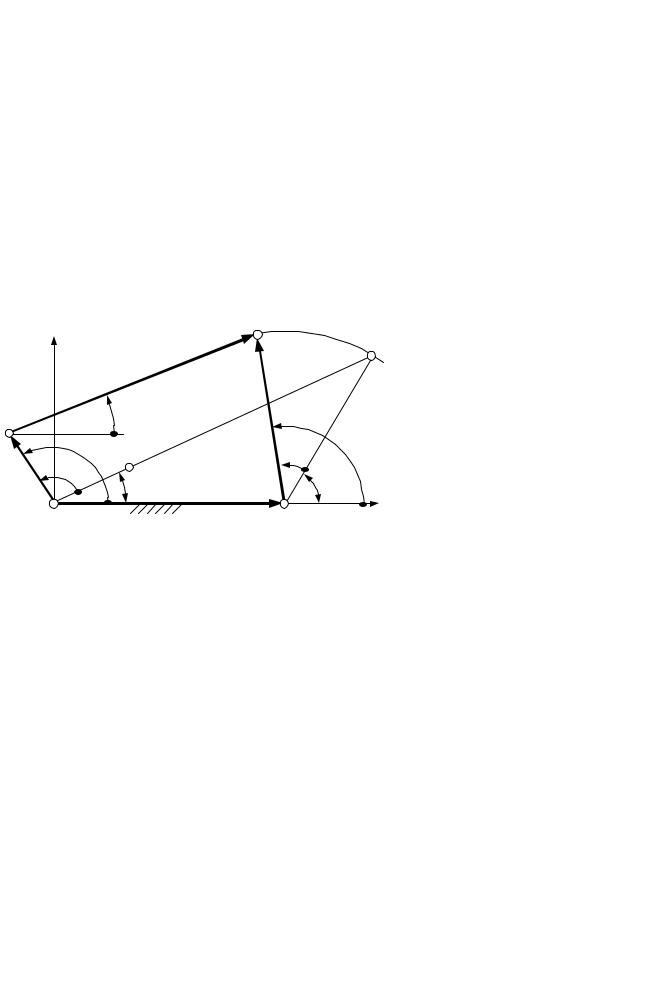
Пусть дан шарнирный четырёхзвенник ABCD, показанный на рис.1. |
|||||
|
|
|
C |
C0 |
AB0C0D - крайнее правое |
y |
|
l2 |
|
положение механизма; |
|
|
|
l3 |
|
ϕ и ψ - координаты входного |
|
|
|
|
|
||
B |
|
ϕ 2 |
|
|
AB и выходного CD звеньев |
|
|
ϕ 3 |
относительно крайнего |
||
|
|
|
|
||
|
ϕ 1 |
B0 |
ψ |
положения. По известным |
|
ϕ |
|
||||
|
|
|
|
размерам звеньев требуется |
|
l1 |
|
α |
|
β |
|
|
|
рассчитать и построить три |
|||
|
|
l0 |
|
x |
|
A |
|
D |
кинематические диаграммы - |
||
|
|
Рис. 1 |
|
|
функцию положения ψ (ϕ ) и |
две её производные - ψ′ (ϕ ) и ψ″ (ϕ ). Для вывода функции положения |
|||||
воспользуемся методом векторных контуров. В простейшем случае, с |
|||||
которым мы имеем дело, метод состоит в следующем. |
|||||
С каждым звеном механизма связывают вектор, выбираемый так, |
|||||
чтобы образовался замкнутый векторный контур, кинематически |
|||||
эквивалентный механизму. Направление векторов выбирают произвольно. |
|||||
Со стойкой связывают систему координат x-y, расположенную тоже |
|||||
произвольно. Показывают положительные углы векторов относительно оси |
|||||
х (и только х). Положительные углы отсчитываются против часовой |
|||||
стрелки. |
|
|
|
|
|
Составляют уравнение замкнутости векторного контура. Оно |
|||||
представляет собой уравнение геометрической суммы векторов. Этой сумме |
|||||
придают такую форму, при которой она равна нулю. Сумма равна нулю при |
|||||
условии, что векторы, попутные обходу контура в произвольном |
|||||
направлении, подставляются в эту сумму со знаком “плюс”, а встречные - со |
|||||
знаком “минус”. |
|
|
|
||
Обходя контур ABCD по часовой стрелке, получим |
|||||

2
l1 + l2 − l3 − l0 = 0 .
После уравнения замкнутости составляют уравнения проекций векторного контура на оси координат. Для этого при проецировании на ось х модуль каждого вектора, входящего в уравнение замкнутости, умножают на косинус угла вектора с осью х, а при проецировании на ось у - на синус того же угла. Знаки в уравнениях проекций оставляют такими же, как в уравнении замкнутости. В нашем примере уравнения проекций имеют вид:
l1 cosϕ |
1 + |
l2 cosϕ |
2 − |
l3 cosϕ |
3 − l0 cosϕ 0 = 0; |
|
|
l1 sinϕ |
1 + |
l2 sinϕ |
2 − |
l3 sinϕ |
3 − l0 sinϕ 0 = 0. |
|
||||||
Привычка к графо-аналитическим методам побуждает некоторых студентов обращаться к схеме механизма, чтобы проверить знаки проекций. В этом нет необходимости. Метод, который мы рассматриваем, гарантирует правильность уравнений проекций как в отношении синусов-косинусов, так и в отношении знаков.
Более того, уравнения, составленные так, как мы предлагаем, универсальны. Они позволяют определять координаты звеньев не только для рассматриваемого положении механизма, но и для любого другого.
Переходя от ϕ |
1 и ϕ 3 к ϕ |
|
и ψ |
, а также учитывая, что ϕ 0 =0, получим: |
||||||
l1 cos(ϕ |
+ |
α |
) + |
l2 cosϕ |
2 − l3 cos(ψ |
+ |
β ) − l0 |
= 0; |
(1) |
|
|
l1 sin(ϕ |
+ |
α |
) + |
l2 sinϕ |
2 − l3 sin(ψ |
+ |
β ) = 0. |
|
|
|
|
|
||||||||
Углы α и β , характеризующие крайнее положение механизма, могут быть определены из треугольника AC0D, размеры которого известны; угол ϕ является независимой переменной (в функции от неё мы будем строить диаграммы). С учётом всего этого находим, что система (1) содержит только два неизвестных - ϕ 2 и ψ . Определять необходимо оба.
Начиная, например, с ψ , из уравнений исключают ϕ 2. Это делается переносом слагаемых l2 cosϕ 2 и l2 sinϕ 2 за знак равенства, с последующим возведением в квадрат и сложением обоих уравнений. После вывода ψ из уравнений проекций выводят ϕ 2.
Двукратным дифференцированием системы (1) - по координате ϕ - получают уравнения, содержащие производные. Покажем результаты только первого дифференцирования:
|
|
3 |
|
|
|
|
|
|
|
|
− l1 sinϕ |
− l2 (sinϕ |
2 )ϕ |
|
′ |
+ l3( sinψ |
) ψ |
′ |
= 0; |
|
|
|
2 |
|
|
(2) |
||||||
|
l2 (cosϕ |
2 )ϕ |
′ |
|
l3( cosψ |
) ψ |
′ |
|
|
|
l1 cosϕ + |
− |
= 0. |
|
|||||||
2 |
|
|
||||||||
Неизвестными в данной системе уравнений являются ϕ 2′ и ψ′ . Определять необходимо оба. Особенность системы такова, что она может быть эффективно решена поворотом осей координат. Повернём оси на ϕ 2, тогда первое уравнение системы (2) примет вид:
–l1 sin(ϕ –ϕ 2)+l3 (sinψ –ϕ 2)ψ′ =0.
Отсюда может быть выведено ψ′ . После поворота на угол ψ то же самое уравнение системы (2) примет вид:
–l1 sin(ϕ –ψ )–l2(sinϕ 2–ψ )ϕ 2′ =0.
Отсюда может быть выведено ϕ 2′. Второе уравнение системы (2) в этом примере остаётся невостребованным.
В результате дифференцирования системы (2) образуются уравнения, содержащие вторые производные - ϕ″ и ψ″ . Они выводятся аналогично. Однако на этот раз достаточно вывести лишь ψ″ . По выведенным формулам производят вычисления и строят графики.
Указания по схемам, используемым на занятии
Эти схемы приведены на рис. 2. Схемы подготовлены так, чтобы начать решение задачи с составления уравнения замкнутости уже сформированного векторного контура. Для входного и выходного звеньев даны формулы перехода от координат векторов к координатам звеньев.
В уравнениях проекций рекомендуется избавиться сначала от ϕ 2 и вывести l3 (в схеме а) и l2 (в схемах б и в). Затем, вернувшись к
уравнениям проекций, вывести из них sinϕ 2 и cosϕ |
2. При вычислениях |
||
на компьютере угол ϕ 2 рекомендуется определять по следующему |
|||
алгоритму: |
=0, то углу ϕ 2 присвоить значение π |
/2; |
|
♦ |
Если cosϕ 2 |
||
♦ |
В противном случае вычислить х= sinϕ 2 /cosϕ 2; |
|
|
♦ |
Если cosϕ 2 |
> 0, то углу ϕ 2 присвоить значение arc tg х; |
|
♦ |
Если cosϕ 2 |
<0, то углу ϕ 2 присвоить значение π |
+arc tg х. |
При вычислениях на калькуляторе достаточно вывести только cosϕ 2 и определять ϕ 2 через arccos.

|
|
|
|
|
4 |
|
|
|
|
|
|
|
y |
B |
y |
|
|
|
B |
|
y |
|
|
|
|
l1 |
|
ϕ 1 |
|
l1 |
|
|
ϕ 1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
A |
|
A |
|
ϕ |
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ϕ |
|
|
|
|
|
B0 |
α |
l2 |
|
ψ |
|
|
|
l2 |
l0 |
|
l2 |
|
|
|
|
||||
l3 |
|
|
ϕ 2 |
l0 |
|
|
|
|||||
|
|
|
|
|
ψ |
|
B |
|
|
ϕ 1 |
B0 |
|
+l |
|
|
|
|
|
β |
|
|
ϕ |
|
||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
ϕ 2 |
|
|
ϕ |
2 |
|
|
l1 |
|
|
α |
4 |
l |
C |
|
|
|
|
|
|
|
||||
C |
|
|
|
|
|
|
|
A |
|
|
x |
|
|
|
|
|
|
|
x |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
C0 |
x |
α |
=arcsin(l1/l0). |
|
|
|
|
|
|
|||
|
α |
=arcsin(l1/l0). |
|
|
||||||||
|
|
β |
=90° –α . |
|
|
|
||||||
|
|
|
ϕ |
1=ϕ |
+α . |
|
|
|
||||
ϕ 1=ϕ –90° . l3 |
=l1+l2–s. |
ϕ |
1=ϕ |
–α . |
|
|
–ψ . |
|
|
|||
|
|
ϕ |
2=90° +α |
|
|
|||||||
ϕ |
2=ψ +β . |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||
а) |
|
|
|
б) |
|
|
|
|
в) |
|
|
|
|
|
|
|
Рис. 2 |
|
|
|
|
|
|
||
5
Требования к отчёту
Отчёт должен содержать выводы формул, результаты вычислений, сведённые в таблицу, и графики. Результаты вычислений приводятся для 12 значений угла ϕ . Компьютерные графики строятся по 360 точкам.
Рекомендуемая литература
Артоболевский И.И. Теория механизмов и машин. - М.: Высш. шк.,
1988. - С. 112 - 130.
Составитель Владимир Николаевич Ермак
РАСЧЁТНЫЕ КИНЕМАТИЧЕСКИЕ ДИАГРАММЫ
Методические указания к практическим занятиям по теории механизмов и машин
для студентов направлений 552900, 551800, 551400
Редактор З. М. Савина
ЛР № 020313 от 23.12.96.
Подписано в печать 25.01.2000. Формат 60× 84/16.
Бумага офсетная. Отпечатано на ризографе. Уч.-изд. л. 0.3.
Тираж 100 экз. Заказ ...................
Кузбасский государственный технический университет. 650026, Кемерово, ул. Весенняя, 28.
Типография Кузбасского государственного технического университета.
650099, Кемерово, ул. Д. Бедного, 4а.