

В.Н. Ермак Структурный анализ и синтез механизмов. Методические указания к лабораторной работе по теории механизмов и машин для студентов направлений 552900, 551800, 551400
.pdfМинистерство образования Российской Федерации
Кузбасский государственный технический университет
Кафедра прикладной механики
СТРУКТУРНЫЙ АНАЛИЗ И СИНТЕЗ МЕХАНИЗМОВ
Методические указания
клабораторной работе по теории механизмов и машин для студентов направлений 552900, 551800, 551400
Составитель В.Н. Ермак
Утверждены на заседании кафедры Протокол № 8 от 29.06.99
Рекомендованы к печати методической комиссией направления 552900 Протокол № 244 от 05.01.2000
Электронная копия хранится в библиотеке главного корпуса КузГТУ
Кемерово 2000
3
Цель и содержание работы
Цель работы – выработка практических навыков по выявлению и устранению избыточных связей в механизмах. Студенту предлагается несколько моделей механизмов. Для каждой модели определяется число избыточных связей. Обнаруженные избыточные связи устраняются.
Работа рассчитана на 2 часа.
Краткие сведения из теории
Избыточные связи выявляются и устраняются либо испытанием механизма на неточность его звеньев, либо алгебраически.
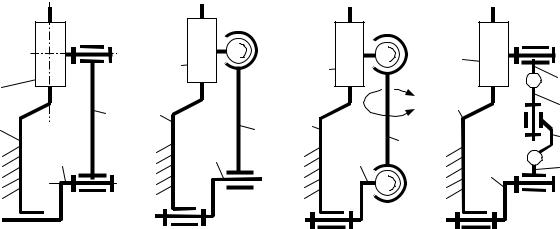
Метод испытания на неточность. По определению механизм есть преобразователь движения одних твёрдых тел в требуемые движения других. Одно и то же преобразование движения может быть осуществлено механизмами различной структуры (строения, устройства). На рис. 1 представлены четыре кривошипно-ползунных механизма различной структуры.
|
d |
а) |
|
|
б) |
|
в) |
г) |
|
c |
c |
3 |
|
|
3 |
3 |
2г |
3 |
|
|
|
|
± ϕ |
|||
|
|
|
|
|
|
|||
0 |
d |
2 |
0 |
|
|
0 |
0 |
2в |
|
2 |
|
2б |
|||||
|
|
1 |
2 |
|||||
|
1 |
|
|
|
1 |
2а |
||
|
b |
b |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
a  a
a
Рис. 1 Предпочтительной является такая структура, при которой меха-
низм оказывается нечувствительным к неточностям его звеньев. С этой точки зрения первый механизм (рис. 1, а) является неправильным. Он боится таких, например, неточностей как непараллельность осей а-а и b- b звена 1, непараллельность осей b-b и с-с звена 2, неперпендикулярность оси а-а звена 0 и его направляющей d-d.
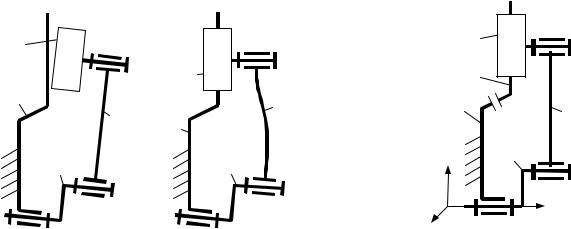
Чтобы убедиться в этом, вообразим, что в рассматриваемый механизм, первоначально идеально точный, внесена только одна неточность – неперпендикулярность оси а-а звена 0 и его направляющей d-d. Тогда звенья 3 и 0 должны внедриться друг в друга или разъединиться (рис. 2, а).
4
Поскольку ни внедрение, ни разъединение невозможно, то все звенья должны будут изогнуться, как показано на рис. 2, б.
а) |
|
|
б) |
|
|
3 |
|
|
|
3 |
|
0 |
3 |
|
|
4 |
|
|
|
2 |
0 |
2 |
|
2 |
0 |
|
|||
|
|
||||
|
|
|
|
|
|
1 |
|
1 |
|
z |
1 |
|
|
|
|
||
|
|
|
|
x |
y |
|
|
|
|
|
|
|
Рис. 2 |
|
|
Рис. 3 |
|
Стремясь принять свою первоначальную форму, |
звенья нагрузят |
||||
шарниры, что затруднит или сделает невозможным проворачивание механизма. При насильственном проворачивании кинематические пары будут выведены из строя.
Чувствительность к неточностям создают избыточные связи. Исследуя реакцию механизма на неточности его звеньев, можно выявить и устранить избыточные связи. При этом достаточно проверить реакцию на неточности только одного звена, например стойки 0. Эту стойку разрезают на две части 0 и 4, называемые далее опорой и направляющей (рис. 3).
Имитируя неточность или деформацию стойки, направляющей 4 пытаются сообщить все шесть независимых перемещений относительно системы xyz, связанной с опорой. Цепь 0...4 не должна удерживать направляющую от всех этих перемещений, т. к. в исходном механизме направляющая уже удерживается опорой. Если какое-то перемещение невозможно, то в соответствующем направлении действует избыточная связь. Сколько перемещений невозможно, столько в исследуемой цепи избыточных связей.
Для устранения избыточных связей кинематические пары механизма заменяют на более подвижные, предоставляющие необходимую свободу направляющей. Замена может быть сделана, например, как показано на рис. 1, б, в.
Если необходимо сохранить существующие кинематические пары неизменными, то избыточные связи устраняют разрезанием звеньев и последующим подвижным соединением их частей. На рис. 1, г шатун разрезан в трёх местах (по числу избыточных связей). В разрезы введе-
|
|
|
|
|
|
5 |
|
|
ны шарниры, сориентированные так, чтобы были возможны все шесть |
||||||||
независимых перемещений направляющей. |
|
|||||||
|
Алгебраический метод. Рассмотренный неформальный способ |
|||||||
обнаружения и устранения избыточных связей не выявляет всех воз- |
||||||||
можных решений второй из этих задач. Исчерпывающие возможности |
||||||||
предоставляет алгебраический метод, основанный на структурной фор- |
||||||||
муле. Согласно этой формуле, число избыточных связей |
|
|||||||
|
|
|
|
|
q=w+s–6n, |
(1) |
||
где w - число степеней свободы механизма, включая местные и беско- |
||||||||
нечно малые степени свободы; s - число связей во всех кинематических |
||||||||
парах, вместе взятых; n - число звеньев, не считая стойку. |
|
|||||||
|
Число степеней свободы механизма, как и любой другой механи- |
|||||||
ческой системы, равно минимальному количеству координат, «замора- |
||||||||
живание» которых лишает механизм подвижности. Так, замораживание |
||||||||
угла поворота кривошипа 1 (рис. 1, а, б, г) лишает механизм подвижно- |
||||||||
сти, следовательно, у каждого из указанных механизмов w =1. |
|
|||||||
|
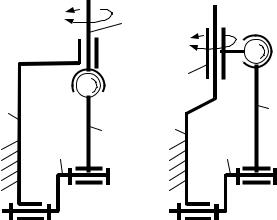
Местными называются степени свободы, не влияющие на преобра- |
|||||||
зование движения, для которого создан механизм. Местную степень |
||||||||
свободы ± ϕ |
имеет звено 2 на рис. 1, в и звено 3 на рис. 4, а. С учётом |
|||||||
этого, указанные механизмы имеют по две степени свободы. |
|
|||||||
а) |
± ϕ |
|
|
IV |
б) |
Пример бесконечно малой |
сте- |
|
3 |
± dϕ |
пени свободы показан на рис. 4, б, где |
||||||
|
|
|
|
|||||
|
|
IV |
3 |
|
III |
при неподвижном звене 1 звено 3 мо- |
||
|
|
III |
|
|
жет поворачиваться на бесконечно ма- |
|||
0 |
|
|
|
2 |
лый угол ± dϕ . Бесконечно малую сте- |
|||
|
|
|
|
|||||
|
2 |
0 |
|
пень свободы называют коротко мгно- |
||||
|
1 |
1 |
|
|||||
|
|
|
|
венной подвижностью. |
|
|||
|
|
V |
|
|
V |
Число связей sij в кинематиче- |
||
|
V |
|
|
V |
|
ской паре i-j определяется одним из |
||
|
Рис. 4 |
|
двух способов: 1) по числу степеней |
|||||
|
|
|
|
|||||
|
|
|
|
свободы, потерянному при образо- |
||||
|
|
|
|
|
|
|||
вании пары из разрозненных звеньев; 2) по минимально необходимому |
||||||||
числу точек касания между звеньями пары. Поясним оба способа на |
||||||||
примере цилиндрической пары 1-2, взятой с рис. 1, б. |
|
|||||||
|
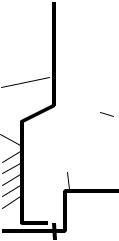
Первый способ. В отсоединённом состоянии звено 2 относительно |
|||||||
звена 1 имеет шесть степеней свободы (рис. 5, а). В присоединённом со- |
||||||||
стоянии - две степени свободы (рис. 5, б). Им соответствуют координа- |
||||||||

6
ты x, ϕ , например. В результате присоединения звено 2 теряет четыре степени свободы, следовательно, у него четыре связи со звеном 1.
|
1 |
|
z |
|
y |
x |
а) |
|
2 |
ϕ |
2 |
|
||
|
x |
1 |
|
A B C D |
|
|
|
|
|
б) |
|
Рис. 5 Рис. 6 Второй способ. Из пары удаляют все точки касания, затем возвращают
их по одной. Как видно из рис. 6, необходимы и достаточны четыре точки касания - A, B, C, D. Эти точки и есть связи. Сколько точек, столько связей. Рис. 6 называется схемой связей. На следующей странице приведены распространённые кинематические пары и схемы их связей.
При алгебраическом синтезе механизмов в структурную формулу подставляют требуемые q, w и n. По условиям синтеза механизм не должен иметь избыточных связей, поэтому q принимают равным нулю. Остальные параметры - w и n - в известных пределах произвольны. В данной лабораторной работе их принимают такими, как в исходном механизме. По приня-
тым данным вычисляют необходимое механизму число связей: |
|
sn=6n–w |
(2) |
Далее подсчитывают число p кинематических пар синтезируемого |
|
механизма. В предлагаемых одноконтурных механизмах |
|
p=n+1 |
(3) |
Раскладывая sn на p кинематических пар, получают несколько вариантов раскладки. Остановившись на одном из них, строят механизм.
Произвольная ориентация подставляемых кинематических пар не гарантирует получение механизма, удовлетворяющего условиям синтеза. Подставляя пары, необходимо следить, во-первых, за тем, чтобы механизм получился кинематически эквивалентным исходному; во-вторых, за тем, чтобы получилось требуемое число степеней свободы w. Если одно из указанных требований не выполняется, то изменяют ориентацию подставляемой пары или ориентацию других пар. Если не помогает ни то, ни другое, то берут пару другого вида с тем же числом связей.

|
|
|
7 |
|
|
|
Кинематические пары и схемы их связей |
|
|||
s |
Схема пары |
Схема |
s |
Схема пары |
Схема |
|
|
связей |
|
|
связей |
1 |
|
|
4 |
Шаровая |
|
|
|
|
|
|
|
|
Шар-плоскость |
|
|
со штифтом |
|
2 |
|
|
4 |
|
|
|
Цилиндр-плоскость |
|
|
Цилиндрическая |
|
2 |
|
|
5 |
Поступательная |
|
|
Шар-цилиндр |
|
|
|
|
|
|
|
|
|
|
3 |
Шаровая |
|
5 |
Вращательная |
|
|
|
|
|
||
3 |
|
|
5 |
|
|
|
Плоскостная |
|
|
Винтовая |
|
Вместо w можно проверять реакцию механизма на деформацию стойки. Проверяют то, что в проверяемом случае легче. Для надёжности лучше проверять то и другое.
Пример. Пусть требуется выявить и устранить избыточные связи в механизме, показанном на рис. 7.
Структурные параметры механизма таковы: w=1, n=3, число кинематических пар p=4, все пары пятисвязные и, следовательно, s=20 (числа связей указывают римские цифры, проставленные около пар).
Число избыточных связей q=w+s–6n=1+20–6 3=3. Для новых структурных схем предложенного механизма примем: q=0, w=1, n=3.
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
V |
Тогда необходимое число связей |
||||||||||
|
|
|
|
|
|
|
|
|
|
V |
sn=6n–w=6 3–1=17. |
||
|
|
|
|
|
|
|
|
|
|
Число пар p=n+1=3+1=4. Семнадцать связей |
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||
3 |
|
|
|
|
|
|
|
|
|
|
раскладывается по четырём кинематическим парам |
||
|
|
|
|
|
|
|
|
|
|
||||
0 |
|
|
|
|
|
|
|
2 |
в следующих трёх вариантах: |
|
|||
|
|
|
|
|
5, 5, 5, 2; |
5, 5, 4, 3; |
5, 4, 4, 4. |
||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
1 |
|
|
|
|
|
Все другие варианты раскладки связей являют- |
|||||
|
|
|
|
|
|
|
|
|
|
V |
ся перестановками найденных и во внимание не |
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
V |
принимаются. Правильный механизм, построенный |
|||||||
|
|
|
|
|
в соответствии со вторым вариантом (5, 5, 4, 3), по- |
||||||||
|
|
|
|
||||||||||
|
|
Рис. 7 |
казан на рис. 1, б. Неправильные - на рис. 4, а, б. |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
Ошибка состоит в том, что у обоих механизмов w=2, |
||
а по условиям синтеза должно быть w=1. Кроме того, цепь 1...3 сопротивляется перемещениям направляющей звена 3 - относительно опоры звена 1 - по оси y, что указывает на наличие избыточной связи, действующей в этом направлении.
Порядок работы
1. Взять с полки первый из предложенных механизмов.
2.Изобразить (от руки) схему механизма так, как она дана в сборнике заданий. Если схема дана в двух проекциях, то срисовать обе.
3.Определить число связей в каждой кинематической паре и проставить это число римскими цифрами на одной из проекций схемы.
4.По формуле (1) определить число избыточных связей q.
5.Если q=0, то поставить механизм на место и взять следующий.
6.Если q≠ 0, то по формулам (2) и (3) вычислить sn и p.
7.Разложить sn на p кинематических пар.
8.По результатам разложения построить не менее трёх схем механизма. На всех схемах проставить числа связей кинематических пар.
Контрольные вопросы
1. Напишите структурную формулу и объясните, что в неё входит. 2. Каковы достоинства механизмов без избыточных связей?
Рекомендуемая литература
1. Левитская О. Н., Левитский Н. И. Курс теории механизмов и машин. –
М.: Высш. шк., 1985.
9
2.Ермак В. Н. Лекции по теории механизмов и машин. - Кемерово: КузГТУ, 2000.
Составитель Владимир Николаевич Ермак
СТРУКТУРНЫЙ АНАЛИЗ И СИНТЕЗ МЕХАНИЗМОВ
Методические указания к лабораторной работе по теории механизмов и машин
для студентов направлений 552900, 551800, 551400
Редактор З. М. Савина
ЛР № 020313 от 23.12.96
Подписано в печать 25.01.2000. Формат 60× 84/16.
Бумага офсетная. Отпечатано на ризографе. Уч.-изд. л. 0.5.
Тираж 100 экз. Заказ ...................
Кузбасский государственный технический университет. 650026, Кемерово, ул. Весенняя, 28.
Типография Кузбасского государственного технического университета.
650099, Кемерово, ул. Д. Бедного, 4а.