

Н.Г.Степанова Выбор электродвигателя с применением ЭВМ
.pdfМинистерство образования Российской Федерации
КУЗБАССКИЙ ГОСУДАРСТВЕHHЫЙ ТЕХHИЧЕСКИЙ
УHИВЕРСИТЕТ
Кафедра прикладной механики
ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ С ПРИМЕНЕНИЕМ ЭВМ
Методические указания по выполнению курсового проекта по курсу «Детали машин»
для студентов направлений 551400, 551800, 552900 специальностей 150200, 120100, 120200
Составители Н.Г.СТЕПАНОВА О.В. ЛЮБИМОВ
Утверждены на заседании кафедры Протокол № 9 от 29.06.00 Рекомендованы к печати методической комиссией направления 552900 Протокол № 271 от 29.06.00
Электронная копия находится в библиотеке главного корпуса КузГТУ
Кемерово 2001
1
Введение
Современная машина имеет, как известно, рабочие органы и их привод. Конструкция и вид рабочих органов определяются целевым назначением машины. Структурная схема машины включает двигатель того или иного типа и одной или нескольких связанных между собой передач. Последние служат для передачи энергии двигателя к рабочему органу и могут быть механическими, электрическими, гидравлическими, пневматическими и комбинированными.
В современной технике у подавляющего числа машин движение рабочих органов является вращательным. К ним относятся транспортные машины, разнообразное станочное оборудование, вспомогательные устройства и средства механизации различных работ и т.п. Приводы большей части этих машин допускают применение стандартных двигателей и типовых механических передач, что позволяет отнести эти приводы к категории общего назначения.
Рациональное проектирование приводов общего назначения должно способствовать снижению их массы, габаритных размеров, повышению КПД и надежности.
Тип двигателя выбирается с учетом:
1) назначения машины, для которой проектируется данный привод;
2)наличия того или иного источника энергии;
3)величины потребной мощности;
4)ограничений по массе, габаритным размерам и условиям работы привода;
5)режима работы привода.
Наличие электроэнергии предопределяет выбор электропривода как наиболее простого и надежного [1].
Предметом курсового проектирования при изучении общетехнической дисциплины «Детали машин» являются приводы общего назначения с электроприводом и механическими передачами, обеспечивающими преимущественно вращательное движение рабочих органов.
Настоящие методические указания содержат краткое описание теоретических основ, а также алгоритма и порядка работы с программой автоматизированного выбора электродвигателя для привода общего назначения и адресованы студентам, освоившим методику ручного расчета и желающим ознакомиться с основами САПР при конструировании.

2
1. Теоретические основы выбора электродвигателя
Выбор электродвигателя из стандартного ряда осуществляется по мощности и частоте вращения.
Ориентировочная мощность электродвигателя
Pдв' = η Pпр , кВт,
общ
где Pпр - мощность на приводном валу, кВт; η общ - общий КПД привода. Значение мощности на приводном валу Pпр непосредственно известно из технического задания на проектирование привода или опреде-
ляется по параметрам, приведенным в техническом задании:
Pпр = Ft v , 1000
где Ft - тяговое усилие на рабочем органе, Н; v - скорость рабочего органа, м/с.
Величина общего КПД η
η общ = ∏nη k , k=1
где η k - КПД отдельных звеньев кинематической цепи [2], ориентировочные значения которых приведены в таблице 1.
|
Таблица 1 |
Тип передачи |
η |
Зубчатая (с опорами, закрытая): |
|
- цилиндрическая |
0,96...0,98 |
- коническая |
0,95...0,97 |
Планетарная (закрытая): |
|
- одноступенчатая |
0,9...0,95 |
- двухступенчатая |
0,85...0,9 |
Червячная (закрытая) при передаточном числе: |
|
- св. 30 |
0,7...0,8 |
- св. 14 до 30 |
0,75...0,85 |
- св. 8 до 14 |
0,8...0,9 |
Ременная (все типы) |
0,94...0,96 |
Цепная |
0,92...0,95 |
Муфта соединительная |
0,98 |
Подшипники качения (одна пара) |
0,99 |

3
Принимаемая паспортная мощность двигателя и его габариты, оказывающие влияние на общие габариты привода, будут меньше, если вести выбор по эквивалентной мощности, учитывающей переменный режим работы привода:
∑ (Pдв' i )2 ti
Pэкв = |
i |
t |
, кВт, |
|
|||
|
|
|
где Pдв' i - мощность двигателя при i-м режиме работы, кВт; ti - время
действия i-го режима работы, ч; t - общее время работы привода, ч. Ориентировочная частота вращения электродвигателя
n'дв = nпр u'общ, об/мин,
где nпр - частота вращения приводного вала, об/мин; u'общ - ориентиро-
вочное общее передаточное число привода.
Значение частоты вращения на приводном валу nпр непосредственно известно из технического задания на проектирование привода или определяется по параметрам, заданным в техническом задании:
а) для привода ленточного конвейера
60 1000 v
nпр = π Dбар , об/мин,
где Dбар - диаметр тягового барабана, мм; б) для привода цепного конвейера
60 1000 v
nпр = z t , об/мин,
где z - число зубьев тяговой звездочки; t - шаг тяговой звездочки, мм. Величина ориентировочного общего передаточного числа опреде-
ляется по формуле
u'общ = ∏m u j , j=1
где uj - передаточные числа механических передач, входящих в кинематическую цепь привода [2], рекомендуемые значения которых приведены в таблице 2.
4
|
|
|
|
Таблица 2 |
Вид передачи |
Твердость |
Значение |
передаточ- |
|
|
|
зубьев |
ных |
чисел |
|
|
|
uрек |
uпред |
Зубчатая цилиндрическая: |
≤ |
HB 350 |
2,5...5 |
6,3 |
- тихоходная ступень во |
||||
всех редукторах (uТ) |
HRC 40...56 |
2,5...5 |
6,3 |
|
|
HRC 56...63 |
2...4 |
5,6 |
|
- быстроходная ступень в |
≤ |
HB 350 |
3,15...5 |
8 |
редукторах с развернутой |
HRC 40...56 |
3,15...5 |
7,1 |
|
схемой (uБ) |
HRC 56...63 |
2,5...4 |
6,3 |
|
- быстроходная ступень в |
≤ |
HB 350 |
4...6,3 |
10 |
соосном редукторе (uБ) |
HRC 40...56 |
4...6,3 |
9 |
|
|
HRC 56...63 |
3,15...5 |
8 |
|
Коробка передач |
|
Любая |
1...2,5 |
3,15 |
Зубчатая коническая |
≤ |
HB 350 |
1...4 |
6,3 |
|
≥ |
HRC 40 |
1...4 |
5 |
Червячная |
|
- |
16...50 |
80 |
Цепная |
|
- |
1,5...4 |
10 |
Ременная |
|
- |
2...4 |
8 |
По полученным значениям осуществляется выбор электродвигателя из стандартного ряда таким образом, чтобы его паспортная мощность
Pпасп несколько превышала ориентировочную Pдв' , а паспортная частота
вращения nпасп как можно меньше отличалась от ориентировочной n'дв .
При выборе Pпасп допускается перегрузка двигателя до 5...8 % при постоянном режиме работы и до 10...12 % при переменном режиме [2].
При выборе nпасп предпочтение отдается двигателям с большей паспортной (асинхронной) частотой вращения - из габаритных соотношений.
В качестве примера стандартного ряда в таблице 3 приведены паспортные данные трехфазных асинхронных короткозамкнутых двигателей серии 4А ГОСТ 19523-74; в прил. А - эскизы исполнений, в прил. Б - габаритные, установочные и присоединительные размеры. Аналогичные данные имеют двигатели серии АИР ТУ 16-525.564-84 [3].
5
|
|
|
|
|
|
|
Таблица 3 |
Pпасп, |
|
Синхронная частота, об/мин |
|
|
|||
кВт |
|
3000 |
|
|
1500 |
||
|
Тип |
|
nпасп, об/мин |
|
Тип |
|
nпасп, об/мин |
0,25 |
|
|
|
|
|
|
|
0,37 |
|
|
|
|
|
|
|
0,55 |
|
|
|
|
71A4 |
|
1390 |
0,75 |
71A2 |
|
2840 |
|
71B4 |
|
1390 |
1,1 |
71B2 |
|
2810 |
|
80A4 |
|
1420 |
1,5 |
80A2 |
|
2850 |
|
80B4 |
|
1415 |
2,2 |
80B2 |
|
2850 |
|
90L4 |
|
1425 |
3 |
90L2 |
|
2840 |
|
100S4 |
|
1435 |
4 |
100S2 |
|
2880 |
|
100L4 |
|
1430 |
5,5 |
100L2 |
|
2880 |
|
112M4 |
|
1445 |
7,5 |
112M2 |
|
2900 |
|
132S4 |
|
1455 |
11 |
132M2 |
|
2900 |
|
132M4 |
|
1460 |
15 |
160S2 |
|
2940 |
|
160S4 |
|
1465 |
18,5 |
160M2 |
|
2940 |
|
160M4 |
|
1465 |
22 |
180S2 |
|
2945 |
|
180S4 |
|
1470 |
30 |
180M2 |
|
2945 |
|
180M4 |
|
1470 |
Pпасп, |
|
Синхронная частота, об/мин |
|
|
|||
кВт |
|
1000 |
|
|
750 |
|
|
|
Тип |
|
nпасп, об/мин |
|
Тип |
|
nпасп, об/мин |
0,25 |
|
|
|
|
71B8 |
|
680 |
0,37 |
71A6 |
|
910 |
|
80A8 |
|
675 |
0,55 |
71B6 |
|
900 |
|
80B8 |
|
700 |
0,75 |
80A6 |
|
915 |
|
90LA8 |
|
700 |
1,1 |
80B6 |
|
920 |
|
90LB8 |
|
700 |
1,5 |
90L6 |
|
935 |
|
100L8 |
|
700 |
2,2 |
100L6 |
|
950 |
|
112MA8 |
|
700 |
3 |
112MA6 |
|
955 |
|
112MB8 |
|
700 |
4 |
112MB6 |
|
950 |
|
132S8 |
|
720 |
5,5 |
132S6 |
|
965 |
|
132M8 |
|
720 |
7,5 |
132M6 |
|
970 |
|
160S8 |
|
730 |
11 |
160S6 |
|
975 |
|
160M8 |
|
730 |
15 |
160M6 |
|
975 |
|
180M8 |
|
730 |
18,5 |
180M6 |
|
975 |
|
|
|
|
22 |
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
6
2. Описание программы
Алгоритм автоматизированного выбора электродвигателя для привода общего назначения содержит следующие программные блоки.
Ввод исходных данных. В качестве таковых в программе вводятся: а) тип привода; б) тип редуктора, используемого в приводе;
в) тяговое усилие на ленте или цепи Ft, Н; г) скорость ленты или цепи v, м/с;
д) диаметр барабана Dбар, мм - в случае расчета привода ленточного конвейера или число зубьев z и шаг звездочки t, мм - в случае расчета привода цепного конвейера;
е) параметры, характеризующие переменный режим работы приво-
да.
Примечание - В случае расчета иного привода, нежели привод конвейера, в качестве исходных данных вводятся Pпр, кВт, и nпр, об/мин.
Расчет и вывод на печать результатов:
а) тип электродвигателя;
б) его паспортная частота вращения nпасп, об/мин, и паспортная
мощность Pпасп, кВт;
в) значения ориентировочной мощности, эквивалентной мощности, ориентировочной частоты вращения, на основании которых произведен выбор электродвигателя;
г) эскиз исполнения электродвигателя.
Предлагаемый алгоритм расчета имеет следующие ограничения: а) с учебной целью предусматривается выбор электродвигателя для
типов приводов, используемых наиболее часто в курсовом проектировании по курсу «Детали машин»;
б) предусмотренные алгоритмом типы редукторов ограничиваются наиболее часто используемыми кинематическими схемами;
в) назначение КПД отдельных звеньев кинематической цепи производится в алгоритме согласно рекомендациям, изложенным в [2];
г) назначение передаточных чисел ступеней, а также ограничение передаточных чисел предельными значениями производится в алгоритме согласно рекомендациям, изложенным в [2];
д) автоматизированный выбор осуществляется в базе данных двигателей электрических закрытых обдуваемых единой серии 4А (аналогичные типоразмеры - у двигателей серии АИР).
7
3. Работа с программой
Программа выполнена в виде программного приложения, функционирующего в среде Windows 9x.
Диалоговый режим при работе с программой организуется с помощью окон, в которых требуемый раздел выбирается системой меню. После ввода данных или получения результатов программе должна сообщаться информация о продолжении работы или ее прекращении.
3.1 Запуск программы
Непосредственно после запуска программы открывается главное окно, которое помимо заставки содержит следующие пункты меню:
-«Справка» - выбор данного пункта приводит к выводу окна с кратким описанием назначения программы;
-«База данных» - выбор данного пункта приводит к открытию базы данных электродвигателей;
-«Расчет по параметрам» - выбор данного пункта приводит к вводу исходных данных и расчету;
-«Выход» - для окончания работы программы.
3.2 Пункт меню «База данных»
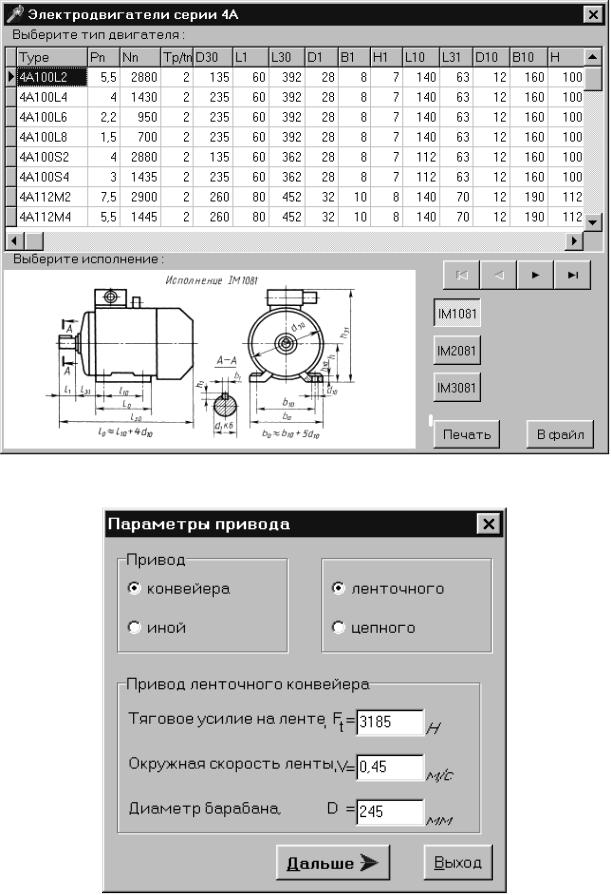
Воспользовавшись этим пунктом меню, можно просмотреть в окне базу данных, содержащую сведения о паспортных мощностях и частотах вращения, а также о габаритных, установочных и присоединительных размерах электродвигателей серии 4А различных исполнений
(рис.1).
Если тип двигателя пользователем уже предварительно выбран, а затем найден в базе данных, его параметры могут быть выведены по желанию либо на печать, либо в графический файл.
3.3 Пункт меню «Расчет по параметрам»
При выборе этого пункта меню последовательно осуществляются следующие действия:
а) в открывшемся окне «Параметры привода» (рис. 2) с помощью групп зависимых переключателей указывается тип привода и в текстовые окна вводятся значения исходных данных. После указания нажимается кнопка «Дальше», в случае отказа от ввода - кнопка «Выход»;
8
Рис.1. Вид окна «База данных»
Рис.2. Указание типа привода и исходных данных в окне «Параметры привода»

9
Рис.3. Указание типа редуктора в окне «Редуктор»
Рис.4. Ввод параметров, характеризующих переменный режим работы привода, в окне «Кинематические параметры»