

А.В. Бородин Моделирование типовых динамических звеньев с помощью системы Matlab
.pdfМинистерство образования Российской Федерации Государственное учреждение
Кузбасский государственный технический университет Кафедра электропривода и автоматизации
МОДЕЛИРОВАНИЕ ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ С ПОМОЩЬЮ СИСТЕМЫ
MATLAB
Методические указания к лабораторным работам по курсу «Теория автоматического управления» для студентов специальности 180400
«Электропривод и автоматика промышленных установок и технологических комплексов»
Составители А. В. Бородин В. М. Завьялов
Утверждены на заседании кафедры « 15 » февраля 2002 г.Протокол № 2
Рекомендованы к печати учебнометодической комиссией по специальности 180400
« 16 » февраля 2002 г.Протокол № 3
Электронная копия находится в библиотеке главного корпуса ГУ КузГТУ
Кемерово 2003
1
1. ОБЩИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ ЛАБОРАТОРНЫХ РАБОТ
Лабораторные работы выполняют на персональных компьютерах в операционной среде Windows с системой MatLab 6.1 (R12.1) и паке-
тами прикладных программ Control System Toolbox 5 и Simulink.
ЦЕЛЬ РАБОТ. Исследование характеристик типовых динамических звеньев и их анализ при изменении постоянных времени и коэффициентов передачи звеньев. Получение навыков исследования линейных динамических моделей с использованием пакетов прикладных программ Control System Toolbox и Simulink системы инженерных расчетов MatLab 6.
2. ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ РАБОТ
Для выполнения лабораторных работ используется пакет прикладных программ Simulink [6] системы инженерных расчетов MatLab.
Simulink – это интерактивная среда для моделирования и анализа широкого класса динамических систем, которая предоставляет пользователю графический интерфейс для конструирования моделей из стандартных блоков при помощи технологии «drag-and-drop». Обширная библиотека блоков позволяет моделировать очень быстро – без написания единой строчки кода.
Выполнению лабораторных работ предшествует изучение учебного материала, изложенного на лекциях и в литературе [1-4]. Практическое выполнение работы состоит из следующих шагов.
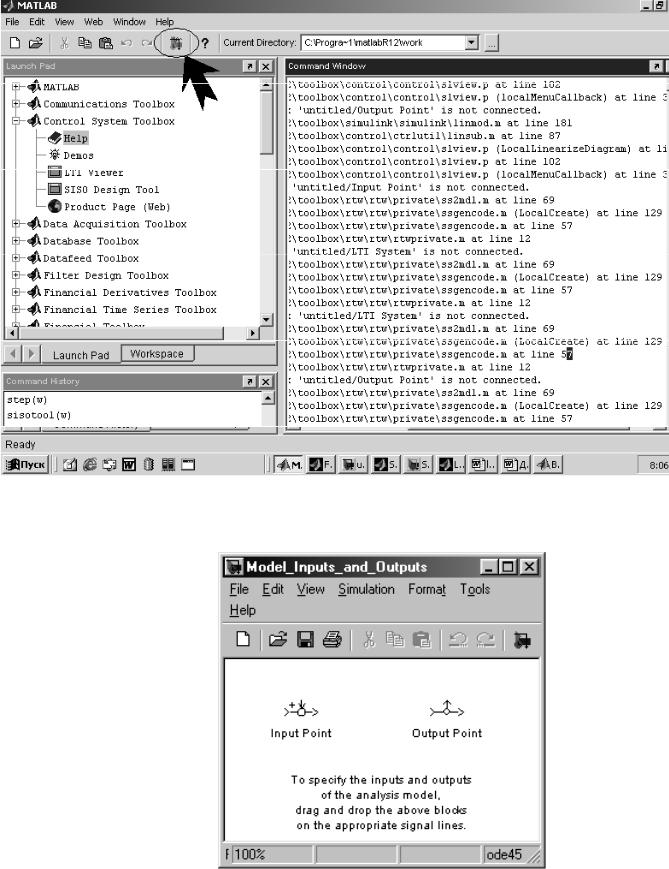
1.Запуск системы MatLab 6.
2.Запуск среды Simulink (рис. 1).
3.Создать новую рабочую область командой «File -> New ->
Model» или нажатием на кнопку  (см. рис.1.)
(см. рис.1.)
4. Поместить изображение модели звена, предназначенного для исследования, на рабочую область. Для этого нужно либо перетащить его с помощью мыши, либо скопировать его из библиотеки «Typical blocks».
2
Рис. 1. Основное окно Matlab
Рис. 2. Окно вспомогательных блоков LTI Viewer
3
5.Задать значения параметров звена. Для этого дважды щелкнуть правой клавишей мыши на блоке и в открывшемся окне подставить нужные значения параметров.
6.С помощью команды «tools -> linear analysis» открыть окно со вспомогательными блоками (рис. 3.2).
7.Блоки «Input point» и «Output point» поместить на рабочую область и соединить соответственно со входом и выходом исследуемого звена или какого-либо участка системы.
8.Построить частотные характеристики с помощью команды
«Simulnk –> Get Linearized Model» в окне LTI Viewer:Untitled.
9.Выбрать необходимые характеристики с помощью команды
«Edit -> Plot Configurations…».
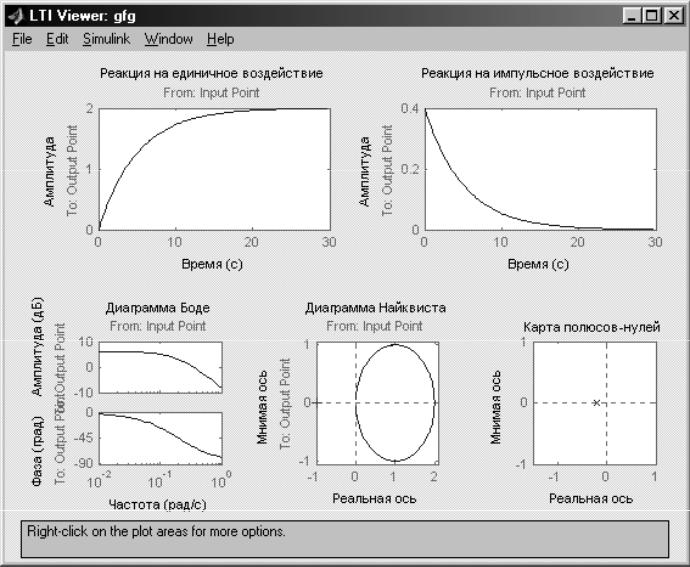
Рис. 3. Характеристики модели
4
Методический пример. Задана передаточная функция САУ
W(s)=2/(5s+1).
Выполняя последовательно шаги 1-9, перечисленные выше, получим следующие характеристики звена: реакцию на единичное воздействие, реакцию на импульсное воздействие, годографы АФЧХ, АЧХ, ФЧХ, ЛЧХ, ЛФЧХ, корни и полюса передаточной функции (рис. 3).
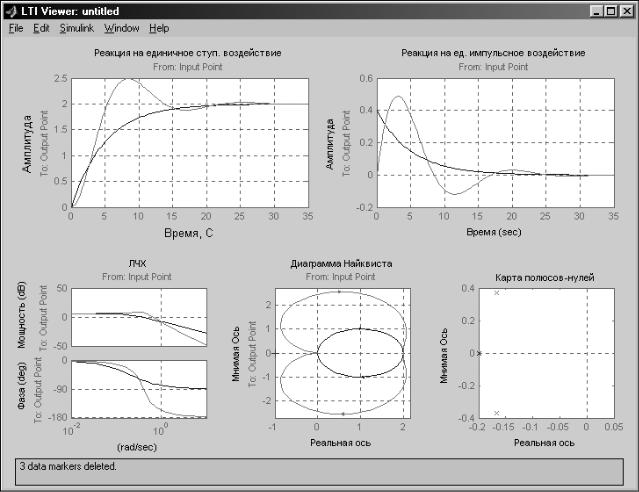
Установив указатель мыши на один из графиков и нажав, и удерживая правую кнопку мыши можно увидеть координаты интересующих нас точек. Соответственно, данное свойство дает возможность определения прямых, частотных и корневых показателей качества. Чтобы определить, как будут меняться характеристики системы при изменении постоянных времени или коэффициентов передачи, необходимо внести изменения в модель и выполнить команду «Simulnk –> Get Linearized Model» в окне LTI Viewer:Untitled.
Например, при переходе к передаточной функции W(s)=2/(6s2+2s+1), характеристики изменяются (рис. 4.).
Рис. 4. Сравнение характеристик при изменении параметров модели
5
3. ВАРИАНТЫ ЗАДАНИЙ
Задача 1. Построить и исследовать характеристики звена с помо-
щью Simulink.
Вид передаточной |
№ |
Коэффициенты полиномов |
|||||||||||
Функции |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Пропорциональное |
1 |
|
|
|
1 |
|
|
||||||
|
|
|
|
|
|
|
|
||||||
2 |
|
|
|
2 |
|
|
|||||||
|
звено: |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||||
3 |
|
|
|
10 |
|
|
|||||||
W( p ) =b0 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
||||||
4 |
|
|
|
4 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b0 |
|
|
a1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. Одноемкостное звено: |
1 |
|
1 |
|
|
2 |
|||||||
|
|
|
|
|
|
|
|
||||||
2 |
|
8 |
|
|
-6 |
||||||||
W( p ) = |
|
b0 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
-4 |
|
|
5 |
||||||||
|
a1 p +1 |
|
|
|
|||||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
4 |
|
6 |
|
|
-6 |
||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
2 |
|
|
-10 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b0 |
|
a0 |
|
a1 |
|
а2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. Двухъемкостное звено: |
1 |
0 |
|
-3 |
|
7 |
|
-7 |
|||||
|
|
|
|
|
|
|
|
||||||
2 |
-5 |
|
-8 |
|
-2 |
|
-1 |
||||||
W( p ) = |
|
|
b0 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
-7 |
|
0 |
|
5 |
|
2 |
||||
a2 p |
2 + a1 p + a0 |
|
|
|
|||||||||
|
|
|
|
||||||||||
4 |
-6 |
|
1 |
|
0 |
|
0,6 |
||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
2 |
|
5 |
|
3 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
Вид передаточной |
№ |
Коэффициенты полиномов |
|||
функции |
|
|
|||
|
|
|
|
|
|
|
|
|
|
b0 |
|
|
|
|
|
|
|
4. Интегрирующее звено: |
1 |
4 |
|||
|
|
||||
2 |
7 |
||||
W( p ) = |
b0 |
|
|
|
|
3 |
-2 |
||||
p |
|||||
|
|||||
|
|
|
|||
|
|
|
4 |
-7 |
|
|
|
|
|
|
|
|
|
|
5 |
-3 |
|
|
|
|
|
|
|
|
|
|
|
b0 |
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
5. Дифференцирующее |
|
|
|||
2 |
7 |
||||
звено: |
|
|
|||
3 |
-3 |
||||
W( p ) = b0 p |
|||||
|
|
|
4 |
-7 |
|
|
|
|
|
|
|
|
|
|
5 |
-0,5 |
|
|
|
|
|
|
|
Задача 2. Используя стандартный набор блоков Simulink и библио-
теку Typical blocks:
а) составить структурные схемы; б) подобрать параметры устройства управления так, чтобы выпол-
нялись требования вариантов.
Структурная схема |
ОУ |
|
|
Коэффициенты |
|
|||||||
|
|
|
|
|
|
полиномов |
|
|||||
|
|
|
№ |
|
1 |
|
2 |
3 |
|
4 |
|
5 |
1. По принципу |
|
|
b0 |
|
3 |
|
6 |
1 |
|
-3 |
|
2 |
разомкнутого |
1. Одноемкостное |
|
a0 |
|
4 |
|
5 |
3 |
|
-2 |
|
1 |
|
Система устойчива |
|||||||||||
управления по же- |
звено |
|
||||||||||
сткой программе |
|
Система неустойчива |
||||||||||
|
|
|||||||||||
|
|
|
|
|
|
Тп.п. - min |
|
|
|
|||
7
Структурная схема |
|
ОУ |
|
|
Коэффициенты |
|
|
||||||||||
|
|
|
|
|
|
|
полиномов |
|
|
||||||||
|
|
|
|
|
№ |
|
1 |
|
2 |
|
3 |
|
4 |
|
|
5 |
|
|
|
|
|
|
b0 |
|
0 |
|
-3 |
|
7 |
|
-7 |
|
|
-3 |
|
|
|
|
|
|
a0 |
-5 |
-8 |
-2 |
-1 |
7 |
|||||||
|
|
2. Двухъемкост- |
|
а1 |
|
-7 |
|
0 |
|
5 |
|
2 |
|
|
-7 |
|
|
|
|
|
а2 |
|
-6 |
|
1 |
|
0 |
|
0,6 |
|
5 |
|
|||
|
|
|
ное звено |
|
|
|
|
|
|
|
|||||||
|
|
|
|
Система устойчива |
|||||||||||||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
Система неустойчива |
||||||||||||
|
|
|
|
|
|
|
|
Тп.п. - min |
|
|
|||||||
|
|
3. Интегрирую- |
|
b0 |
|
4 |
|
7 |
|
-2 |
-7 |
-3 |
|
||||
|
|
|
|
Система устойчива |
|||||||||||||
|
|
|
щее звено |
|
Система неустойчива |
||||||||||||
|
|
|
|
|
|
|
|
Тп.п. - min |
|
|
|||||||
|
|
4. Дифференци- |
|
b0 |
|
2 |
|
7 |
|
-3 |
-7 |
-5 |
|
||||
|
|
рующее звено |
|
|
Система устойчива |
||||||||||||
|
|
|
|
|
Система неустойчива |
||||||||||||
|
|
|
|
|
|
|
|
Тп.п. - min |
|
|
|||||||
|
|
|
|
|
b0 |
|
3 |
|
6 |
|
1 |
|
4.5 |
|
2 |
|
|
|
|
1. Одноемкостное |
|
a0 |
|
4 |
|
5 |
|
3 |
|
-3 |
|
|
1 |
|
|
|
|
|
Система устойчива |
||||||||||||||
|
|
|
звено |
|
|||||||||||||
|
|
|
|
Система неустойчива |
|||||||||||||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
Тп.п. - min |
|
|
|||||||
|
|
|
|
|
b0 |
|
0 |
|
-3 |
|
7 |
|
-7 |
|
|
-3 |
|
|
|
|
|
|
a0 |
-5 |
-8 |
-2 |
-1 |
7 |
|||||||
2. По принципу |
2. Двухъемкост- |
|
а1 |
|
-7 |
|
0 |
|
5 |
|
2 |
|
|
-7 |
|
||
|
а2 |
|
-6 |
|
1 |
|
0 |
|
0,6 |
|
5 |
|
|||||
|
ное звено |
|
|
|
|
|
|
|
|||||||||
разомкнутого |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Система устойчива |
||||||||||||||
|
|
|
|
||||||||||||||
управления |
по |
|
|
|
Система неустойчива |
||||||||||||
возмущению |
|
|
|
|
|
|
|
Тп.п. - min |
|
|
|||||||
|
|
3. |
Интегрирую- |
|
b0 |
|
4 |
|
7 |
|
-2 |
-7 |
-3 |
|
|||
|
|
|
|
Система устойчива |
|||||||||||||
|
|
|
щее звено |
|
Система неустойчива |
||||||||||||
|
|
|
|
|
|
|
|
Тп.п. - min |
|
|
|||||||
|
|
4. Дифференци- |
|
b0 |
|
2 |
|
7 |
|
-3 |
-7 |
-5 |
|
||||
|
|
|
|
Система устойчива |
|||||||||||||
|
|
рующее звено |
|
Система неустойчива |
|||||||||||||
|
|
|
|
|
|
|
|
Тп.п. - min |
|
|
|||||||
8
Структурная схема |
ОУ |
|
|
Коэффициенты |
|
|
|||||||||
|
|
|
|
|
полиномов |
|
|
||||||||
|
|
|
№ |
|
1 |
|
2 |
|
3 |
|
4 |
|
|
5 |
|
|
|
|
b0 |
|
3 |
|
6 |
|
1 |
|
-3 |
|
|
2 |
|
|
1. Одноемкост- |
|
a0 |
|
4 |
|
5 |
|
3 |
|
-2 |
|
|
1 |
|
|
|
Система устойчива |
|||||||||||||
|
ное звено |
|
|||||||||||||
|
|
Система неустойчива |
|||||||||||||
|
|
|
|||||||||||||
|
|
|
|
|
|
Тп.п. - min |
|
|
|||||||
|
|
|
b0 |
|
0 |
|
-3 |
|
7 |
|
-7 |
|
|
-3 |
|
|
|
|
a0 |
-5 |
-8 |
-2 |
-1 |
7 |
|||||||
|
2. Двухъемкост- |
|
а1 |
|
-7 |
|
0 |
|
5 |
|
2 |
|
|
-7 |
|
3. По принципу |
|
а2 |
|
-6 |
|
1 |
|
0 |
|
0,6 |
|
5 |
|
||
ное звено |
|
|
|
|
|
|
|
||||||||
разомкнутого |
|
Система устойчива |
|||||||||||||
|
|
||||||||||||||
управления по от- |
|
|
Система неустойчива |
||||||||||||
клонению |
|
|
|
|
|
Тп.п. - min |
|
|
|||||||
|
3. Интегрирую- |
|
b0 |
|
4 |
|
7 |
|
-2 |
|
-7 |
|
|
-3 |
|
|
|
|
Система устойчива |
||||||||||||
|
щее звено |
|
Система неустойчива |
||||||||||||
|
|
|
|
|
|
Тп.п. - min |
|
|
|||||||
|
4. Дифференци- |
|
b0 |
|
2 |
|
7 |
|
-3 |
|
-7 |
|
|
-5 |
|
|
|
|
Система устойчива |
||||||||||||
|
рующее звено |
|
Система неустойчива |
||||||||||||
|
|
|
|
|
|
Тп.п. - min |
|
|
|||||||
4. Комбинирован- |
|
|
b0 |
|
3 |
|
6 |
|
1 |
|
-3 |
|
|
2 |
|
ная |
1. Одноемкостное |
|
a0 |
|
4 |
|
5 |
|
3 |
|
-2 |
|
|
1 |
|
|
Система устойчива |
||||||||||||||
|
звено |
|
|||||||||||||
|
|
Система неустойчива |
|||||||||||||
|
|
|
|||||||||||||
|
|
|
|
|
|
Тп.п. - min |
|
|
|||||||
|
|
|
b0 |
|
0 |
|
-3 |
|
7 |
|
-7 |
|
|
-3 |
|
|
|
|
a0 |
-5 |
-8 |
-2 |
-1 |
7 |
|||||||
|
2. Двухъемкост- |
|
а1 |
|
-7 |
|
0 |
|
5 |
|
2 |
|
|
-7 |
|
|
|
а2 |
|
-6 |
|
1 |
|
0 |
|
0,6 |
|
5 |
|
||
|
ное звено |
|
|
|
|
|
|
|
|||||||
|
|
Система устойчива |
|||||||||||||
|
|
|
|||||||||||||
|
|
|
Система неустойчива |
||||||||||||
|
|
|
|
|
|
Тп.п. - min |
|
|
|||||||
|
|
|
b0 |
|
4 |
|
7 |
|
-2 |
|
-7 |
|
|
-3 |
|
9
Структурная схема |
|
ОУ |
|
|
Коэффициенты |
||||||
|
|
|
|
|
|
полиномов |
|||||
|
|
|
|
№ |
|
1 |
|
2 |
3 |
4 |
5 |
|
3. Интегрирую- |
|
|
|
Система устойчива |
||||||
|
|
щее звено |
|
Система неустойчива |
|||||||
|
|
|
|
|
|
|
Тп.п. - min |
||||
|
4. |
Дифференци- |
|
b0 |
2 |
7 |
-3 |
-7 |
-5 |
||
|
рующее звено |
|
|
Система устойчива |
|||||||
|
|
|
|
Система неустойчива |
|||||||
|
|
|
|
|
|
|
Тп.п. - min |
||||
Задача 3. Получить у преподавателя структурную схему САУ, сформировать требования к устойчивости и качеству САУ, произвести ее синтез, используя пакет Simulink системы Matlab.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.В каких режимах могут работать системы автоматического регулирования?
2.Что называется переходным процессом?
3.Что называют установившимся процессом?
4.Что называется структурной схемой, ее отличие от принципиальной схемы?
5.Чем отличается статическая система от астатической и чем отличаются уравнения, описывающие эти системы?
6.Как найти результирующую передаточную функцию при последовательном соединении звеньев? Параллельном? Замкнутой системы при наличии обратной связи?
7.Как составить дифференциальное уравнение системы с помощью структурной схемы и передаточных функций её звеньев? Привести пример.
8.Как получить уравнение установившегося процесса?
9.Что называется статизмом системы и как его оценить?
10.Как найти установившееся отклонение регулируемой величины от заданного значения в статической системе?