

В.А. Старовойтов Логическое управление периодиескими процессами химической технологии
.pdfМинистерство образования Российской Федерации Государственное учреждение
Кузбасский государственный технический университет Кафедра электропривода и автоматизации
ЛОГИЧЕСКОЕ УПРАВЛЕНИЕ ПЕРИОДИЧЕСКИМИ ПРОЦЕССАМИ ХИМИЧЕСКОЙ ТЕХНОЛОГИИ
Методические указания к практическим занятиям по курсам «Управление техническими системами» и «Технические средства автоматизации»
для студентов специальностей 170500, 250100, 250400
Составители: В.А. Старовойтов Н.М. Шаулева
Утверждены на заседании кафедры Протокол № 4 от 7.03.01 Рекомендованы к печати методической комиссией по специальности 170500 Протокол № 9 от 29.05.01
Электронная копия находится в библиотеке главного корпуса ГУ КузГТУ
Кемерово 2002
1
1.ЦЕЛЬ РАБОТЫ
Знакомство с техническими средствами логического управления, технологическими аппаратами и получение алгоритма управления.
2.СОДЕРЖАНИЕ РАБОТЫ
2.1.Изучение основных положений алгебры логики и логических преобразований.
2.2.Изучение устройства логических элементов и составление таблицу их включения.
2.3.Получение алгоритма управления для двух технологических аппаратов (по заданию преподавателя).
3.УКАЗАНИЕ К ОТЧЁТУ
Отчёт должен содержать:
а) наименование и цель работы; б) структурную схему соединения логических элементов и табли-
ца их включения; в) структурную схему алгоритма управления двумя аппаратами.
4.КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Впроцессах химических технологий и в ряде случаев на производствах стройматериалов наибольшее распространение получили машины и аппараты периодического действия. Эффективное управление последними невозможно без целого ряда операций переключения. Эти операции выполняются в соответствии с некоторой стратегией, которая формулируется в виде алгоритма управления [1, c.164].
Алгоритм должен предусматривать выполнение ряда условий, связанных с применением оборудования в различных технологических режимах, таких, как пуск и остановка аппаратов, нормальная эксплуатация, авария.
Первоначально стратегия переключений формулировалась в виде словесного предписания или технологического регламента и осуществлялась оператором. Алгоритм в такой форме не позволял осуществить синтез автоматического устройства. Необходима более высокая сте-
2
пень формализации записи, причём технологическое предписание должно быть выражено в терминах, пригодных для использования в технике управления.
Термины, необходимые для алгоритмизации задач переключения, заимствуются из алгебры логики.
Проблему алгоритмизации переключения с применением методов алгебры логики рассмотрим на примере решения типовой задачи управления контактными аппаратами, широко распространенными в химической промышленности.
При управлении указанными аппаратами можно выделить следующие три наиболее характерных задачи, решение которых требует соблюдения определенной последовательности переключательных операций.
1.Оптимальные по экономии времени и эксплуатационным затратам пуск и остановка оборудования.
2.Защита агрегатов в случае возникновения аварийных ситуаций
входе эксплуатации.
3.Согласование циклов работы отдельных аппаратов, работающих на один коллектор (замена оборудования при выводе аппаратов на регенерацию в резерв).
Логическое управление. Перечисленные задачи переключения оборудования обычно реализуются при помощи дискретных автоматов, которые относятся к категориям систем, объединяемых термином «системы логического управления».
Под логическим управлением подразумевается обеспечение при помощи автомата заданной логической связи между сигналами, поступающими от измерительных преобразователей, дающих информацию о состоянии объекта, и управляющими воздействиями на исполнительные устройства.
Любой автомат, как и всякая физическая система, характеризуется двумя факторами: схемой управления, которая в аналитическом виде может быть представлена системой уравнений алгебры логики, и способом реализации этой схемы, который, в свою очередь, зависит от вида и конструкции используемых в автомате элементов (электронных, электромеханических, пневматических и других устройств релейного типа).
В соответствии с двумя указанными признаками автомата задача логического управления решается в два этапа.
3
1.Анализ работы объекта и составление алгоритма управления.
2.Синтез автомата, реализующего полученный алгоритм.
В качестве информации о процессе используются сигналы двух уровней, условно обозначаемых символами «0» и «1», два уровня сигналов в соответствии с двузначностью алгебры логики соответствуют двум возможным состояниям параметра.
Такая форма представления информации о процессе отвечает специфике задач автоматического пуска и защиты оборудования, поскольку управляющие воздействия в системах переключения отрабатываются при условии перехода объекта в новое состояние. Этот переход фиксируется при достижении параметрами, характеризующими состояние объекта, некоторого установившегося критического значения.
При пуске аппарата, например, из холодного состояния для проведения последующей пусковой операции необходимо достигнуть заданной степени прогрева. При этом выход контролируемой температуры на уровень принятой уставки можно рассматривать как переход аппарата из некоторого состояния, обозначенного символом «0», в состояние, характеризуемое символом «1». Первому состоянию соответствовало текущее значение температуры tтек<tзад; для второго состояния выполняется условие tтек>tзад.
Таблица состояний. В приведенном примере рассмотрены лишь два возможных состояния аппарата, поскольку для характеристики объекта использовался только один параметр. В общем случае состояние объекта в каждый момент времени характеризуется совокупностью дискретных («0» или «1») значений достаточно большого числа параметров и может быть представлено таблицей состояний (табл.1).
Таблица 1
X1 |
X2 |
X3 |
… |
Xj |
… |
Xn |
X1 |
X2 |
X3 |
… |
Xj |
… |
XN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
1 |
… |
0 |
… |
1 |
0 |
1 |
0 |
… |
1 |
… |
0 |
1 |
0 |
0 |
… |
0 |
… |
0 |
1 |
0 |
0 |
… |
0 |
… |
1 |
Каждая строка этой таблицы соответствует одному из возможных состояний объекта, для оценки свойств которого используется N параметров. В каждой строке фиксируется один из возможных наборов значений входных параметров X1,X2,X3, …, Xn. Общее число возможных
4
(с точки зрения переключательных операций) состояний объекта равно
2n.
Таблицы включений (истинности). При управлении процессом каждому набору значений входных сигналов ставятся в соответствие определенные дискретные значения выходных, или управляющих, сигналов Y1,Y2, …,Yn. Взаимосвязь входных и управляющих сигналов можно выразить при помощи так называемых таблиц включений, одна из которых для случая трех входных и одного выходного параметров приводится (табл.2). Зависимость между значениями входных и выходного сигналов, выраженная в этой таблице, характеризует определенную стратегию переключения, и поэтому ее можно рассматривать как алгоритм управления.
Приведенная таблица включения соответствует реализации некоторой логической зависимости общего вида Y=f(X1,X2,X3), которую можно представить, воспользовавшись элементарными функциями алгебры логики. При этом принимается, что любая, сколь угодно сложная функция алгебры логики аналитически выражается через три элементарные операции: логическое сложение, логическое умножение и отрицание. Трем указанным элементарным функциям соответствуют следующие таблицы включения, в которых использованы обозначения
всимволах алгебры логики.
1.Логическое сложение (дизъюнкция), называемая также операцией ИЛИ и записываемая для двух сигналов в виде
|
Y=X1V |
|
X2 |
или |
|
Y=X1+X2 |
(табл.2). |
|||
|
|
|
|
|
|
X1 |
X2 |
Y |
|
|
|
|
Таблица 2 |
|
0 |
0 |
0 |
|
|
||
|
|
|
0 |
1 |
0 |
|
|
|||
X1 |
|
X2 |
|
Y |
|
1 |
0 |
0 |
|
|
0 |
|
0 |
|
0 |
|
|
|
|
|
|
|
|
1 |
1 |
1 |
|
|
||||
0 |
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
|
0 |
|
1 |
|
|
|
|
|
|
1 |
|
1 |
|
1 |
|
|
|
|
|
|
|
Таблица 4 |
||
|
X |
Y |
|
Таблица 3 |
0 |
1 |
|
1 |
0 |
|
|
5
2.Логическое умножение (конъюнкция), называемые операцией
Ии записываемые в виде
Y=X1^X2 или Y=X1 . X2 (табл. 3).
3. Логическое отрицание (инверсия), называемое операцией НЕ и записываемое как
Y=X (табл.4).
В общем случае задача алгоритмизации процесса переключений сводится к отысканию функционалов вида
Ym=fm(X1,X2,X3,…,Xj,…,Xn), (1)
обеспечивающих выполнение заданных логических соотношений между совокупностью значений входных параметров X1,X2,…, Xn и управляющих (выходных) параметров Y1,Y2,Y3,…,Ym.
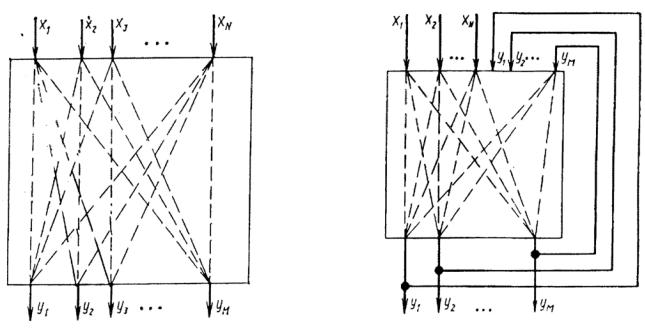
Использование таблиц включения в качестве исходного материала для составления алгоритма управления, выражаемого в терминах алгебры логики, не всегда оказывается возможным. Применение этих таблиц оправдано лишь тогда, когда зависимость между сигналами относительно проста. При большом числе независимых переменных указанный метод становится неудобным, так как составление таблиц связано с перебором всех возможных сочетаний значений аргументов. Например, при N =10 число строк таблицы включений составляет 210=1024. Кроме того, таблицы включения позволяют представить алгоритм управления лишь ограниченного класса логических автоматов, для которых характерна неизменность внутреннего состояния. В таких автоматах определенному набору значений входных аргументов X соответствуют определенные значения выходных функций Y (рис.1).
Системы управления с памятью. Большинство встречающихся на практике логических автоматов относится к категории систем управления с памятью, в которых набор выходных сигналов, вырабатываемых за некоторый отрезок времени, зависит не только от входных сигналов, поданных в тот же момент, но и от сигналов, поступивших ранее. Эти предшествующие внешние воздействия фиксируются в автомате путем изменения его внутреннего состояния. Реакция такого автомата определяется как поступившим набором входных сигналов, так и его внутренним состоянием в данный момент.
Характерной особенностью систем логического управления с памятью является наличие обратных связей в структуре автомата (рис.2).
6
Существование обратных связей учитывается также в системе уравнений, соответствующей алгоритму управления системы с памятью:
Ym=fm(X1,X2,…,Xn; Y1,Y2,…,Ym). (2)
Рис.1. Выходные аргумен- |
Рис.2. Обратные связи в |
ты и выходные переменные в |
структуре логического автомата |
логических автоматах |
|
Отличительным признаком системы уравнений (2) является наличие в правой части символов выходных сигналов Y. Значения сигналов Y1,Y2,…,Ym определяют «внутреннее» состояние автомата в момент изменения какого-либо из входных сигналов Xj.
Ячейка памяти. Простейшим автоматом, реализующим алгоритм с обратной связью, является блок, содержащий элементарную ячейку памяти. Она осуществляет функцию запоминания на своем выходе сигнала 1, поступившего на ее вход, после того, как там снова установится сигнал 0.
Ячейке памяти соответствует уравнение вида Y=X1V(X2.Y). Рассмотрим возможные значения выходного параметра ячейки Y в зависимости от входных сигналов Х1 и Х2.
7
1.Пусть начальное состояние ячейки характеризуется соотноше-
нием сигналов Х1=0 и Х2=0. В этом случае Y должен принять значение 0, что следует из уравнения Y=0V(0.Y), которое превращается в тождество вида 0.0V(0.0).
2.Пусть теперь при Х1=0 сигнал Х2=1, тогда уравнение ячейки запишется в виде Y=0V(1.Y). При такой ситуации Y может принять
значение как 0, так и 1. Однако в момент поступления сигнала Х2=1 параметр Y=0. Поэтому тождество примет вид 0.0V(1.0), и значение Y=0 сохранится.
3.Пусть теперь Х1=1 при условии Х2=1 и Y=0. Тогда Y=1V(1.Y)=1. Правая часть уравнения должна обращаться в 1 при лю-
бом значении Y. Следовательно, Y=1, и это уравнение превратится в тождество вида 1.1V(1.1).
4.При условии Y=1 и Х2=1 снова установим Х1=0. Тогда уравнение запишется в виде Y=0V(1.Y). Поскольку Y=1, тождество должно принять вид 1.0V(1.1), при котором Y=1 сохраняется. Таким образом происходит «запоминание» Y=1 после того, как стало Х1=0.
5.Для того чтобы теперь установить Y=0, необходимо обеспечить
Х2=0 при условии Х1=0. Тогда уравнение ячейки примет вид Y=0V(0.Y)=0, при котором восстановится тождество 0.0V(0.0).
Из рассмотрения уравнения ячейки памяти следует, что между значениями входных параметров Х1 и Х2 и функций Y нет жесткой однозначной связи, характерной для систем, не обладающих памятью.
Неоднозначность связей (см. п. 2 и 4) между параметрами обусловливает необходимость составления ряда таблиц включения для описания одной функции с обратной связью вида Y=f(Х1, Х2,Y). Построение алгоритмов управления систем с памятью на основе серии таблиц включения возможно лишь в немногих простейших случаях. Как правило, алгоритмы процессов переключения нужно сразу формулировать в терминах алгебры логики на основе анализа логических взаимосвязей параметров и выбранной стратегии управления.
Логические преобразования. Этап алгоритмизации процесса переключения заканчивается получением аналитического описания в форме системы логических уравнений, аналогичных уравнениям вида (2). Однако для синтеза автомата по заданному алгоритму необходимо выполнить целый ряд логических преобразований, связанных с приведением системы уравнений к виду, позволяющему затрачивать минимальное число физических элементов схемы управления для реализации заданной стратегии переключения.
8
Логические преобразования проводятся в соответствии с нижеприведёнными правилами.
1. Для функций логического сложения и умножения справедливы переместительный и сочетательный законы:
Х1Х2=Х2.Х1 |
|
X1VX2=X2VX1 |
(3) |
X1(X2.X3)=(X1. X2)X3 X1V(X2VX3)=(X1VX2)X3
Кроме того, для этих двух функций справедливы два распредели-
тельных закона: |
|
X1. (X2VX3)=(X1.X2)V(X1.X3) |
(4) |
X1V(X2.X3)=(X1VX2) . (X1VX3) |
(5) |
Формулы (3) и (4) имеют сходство с аналогичными формулами обычной алгебры, формула же (5) в обычной алгебре эквивалента не имеет.
2.Для функций алгебры логики справедливы также простые, но очень важные соотношения вида
(X)=X |
X. (X)=0 |
|
XVX |
XV1=1 |
(6) |
X.X |
XV0=X |
|
XV(X) |
X.0=0 |
|
Получение алгоритма управления. Предлагаемый выше подход к решению проблемы алгоритмизации проиллюстрируем на примере контактных аппаратов каталитических процессов.
Найдем оптимальную стратегию переключения контактных аппаратов, если в соответствии с задачей переключения отделение контактирования представляет собой систему из К параллельных ниток по m включенных агрегатов в каждой; общее число агрегатов Km. Все агрегаты работают в периодическом режиме (контактирование— регенерация—контактирование), поэтому в любой момент времени в режиме контактирования находится только вполне определенное число агрегатов. Основные количественные показатели работы аппаратов: время контактирования, время регенерации, производительность агрегата, степень превращения, затраты на регенерацию и прибыль на единицу продукции.
Задача оптимизации переключения контактных аппаратов состоит в нахождении такой стратегии переключений, при которой достига-
9
ется экстремум некоторого критерия управления, определяемого через количественные показатели работы указанных аппаратов.
В качестве критерия целесообразно использовать среднюю прибыль R на единицу продукции, получаемую за некоторый интервал времени τ. R(τ) соответствует функции экстремального вида, в которой средняя прибыль R достигает экстремального значения в некоторый момент времени τэ. Интервал времени от нуля до τопт, отсчитываемый от момента очередного пуска аппарата в работу при режиме контактирования до момента выхода параметра на экстремум, можно рассматривать как оптимальное время контактирования при заданных условиях использования аппарата (рис.3).
Постепенное старение катализатора, стохастический характер изменения свойств перерабатываемого сырья и колебания тепловых нагрузок приводят к постоянному дрейфу точки экстремума функции средней прибыли по отношению к оси времени (рис.4).Соответственно меняется оптимальное время контактирования для каждого аппарата и для каждого цикла контактирования.
Следовательно, оптимальную стратегию переключений необходимо строить исходя из предположения, что для каждого j-го агрегата существует своя оптимальная (в смысле максимума средней прибыли за 1 операцию) продолжительность процесса контактирования.
При условии оптимального использования аппаратов стратегию переключения можно сформулировать следующим образом:
1.В любой момент времени переключение необходимо производить так, чтобы обеспечивать постоянное число аппаратов, работающих в режиме контактирования.
2.При выходе очередного агрегата из режима регенерации на режим контактирования переключается тот аппарат, который раньше
других достиг своего оптимального времени контактирования τопт j. Последнее требование может служить критерием переключения. Для более доступного изложения задачи введём некоторые упро-
щения. Допустим, что система управления должна обеспечить оптимальную стратегию переключения аппаратов, расположенных только в одной нитке. Для одной нитки в режим регенерации переводится один аппарат. Остальные m-1 аппаратов в это время работают в режиме контактирования.