

В.Г. Каширских Теория автоматического управления. Методические указания к выполнению курсовой работы
.pdfМинистерство образования Российской Федерации
Кузбасский государственный технический университет
Кафедра электропривода и автоматики
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания к выполнению курсовой работы для студентов направления 550200 «Автоматизация и управление»
и специальности 180400 «Электропривод и автоматика промышленных установок и технологических комплексов»
Составил В.Г. Каширских
Утверждены на заседании кафедры Протокол № 2 от 23.10.2000
Рекомендованы к печати учебнометодической комиссией по специальности 180400 Протокол № 4 от 23.10.2000
Электронная копия находится в библиотеке главного корпуса КузГТУ
Кемерово 2001
1
ВВЕДЕНИЕ
Цель курсовой работы (КР) - закрепление материала изучаемых теоретических разделов дисциплины «Теория автоматического управления» и освоение инженерных методов расчета систем автоматического управления.
Задачей КР является исследование линейной и нелинейной систем автоматического регулирования для определения их устойчивости и качества переходных процессов. Данная КР предполагает выполнение двух заданий. Номер варианта КР каждый студент должен получить у преподавателя.
Задание №1: ИССЛЕДОВАНИЕ ЛИНЕЙНОЙ САР
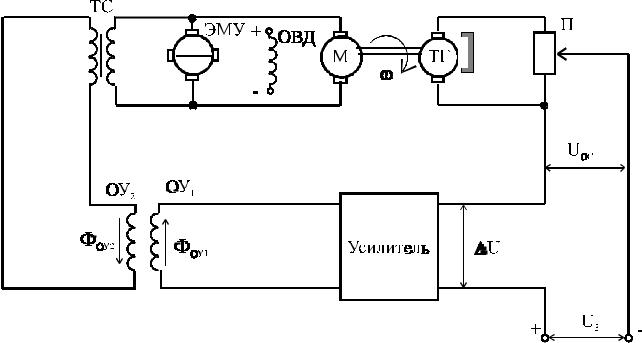
Произвести анализ устойчивости и качества переходного процесса системы автоматического регулирования (САР) напряжения генератора постоянного тока (рис. 1).
Роль регулятора выполняет электромашинный усилитель (ЭМУ) с поперечным полем, имеющий две обмотки управления ОУ1 и ОУ2. Регулируемым объектом является двигатель постоянного тока с независимым возбуждением, обмотка якоря которого подключена к выходному напряжению ЭМУ.
САР предназначена для поддержания частоты вращения двигателя на заданном уровне, определяемом величиной задающего сигнала Uз. Выходное напряжение тахогенератора ТГ преобразуется на потенциометре П в напряжение Uос и сравнивается на обмотке ЭМУ ОУ1 с напряжением Uз (главная обратная связь САР). Для коррекции динамических режимов в САР имеется отрицательная гибкая обратная связь, охватывающая ЭМУ и состоящая из стабилизирующего трансформатора ТС и обмотки ОУ2.
2
Рис. 1. Принципиальная схема САР
Исследование устойчивости и качества САР необходимо производить в следующем порядке:
1. Составить структурную схему САР (вначале без гибкой обратной связи), определить тип ее динамических звеньев, и записать их передаточные функции.
2.Используя критерии Гурвица и Михайлова, проверить устойчивость САР. Если она окажется устойчивой, то нужно изменить один или несколько параметров системы таким образом, чтобы сделать ее неустойчивой (для учебных целей).
3.Для обеспечения устойчивости САР ввести гибкую обратную связь, преобразовав структурную схему в соответствии с исходной принципиальной схемой (рис. 1). При этом ТС нужно представить реальным дифференцирующим звеном.
4.Пользуясь методом Д-разбиения, определить значение посто-
янной времени звена гибкой обратной связи ТТС, при котором САР будет устойчива.
5.Приняв значение ТТС , соответствующее устойчивому состоянию САР, проверить устойчивость системы по критериям Найквиста
иЛЧХ.
3
6.Используя вещественную частотную характеристику (ВЧХ) замкнутой устойчивой системы, с помощью метода трапеций вычислить и построить кривую переходного процесса.
7.По кривой переходного процесса определить прямые показатели качества процесса регулирования.
ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА
1. Общие для всех данные:
Постоянные времени и коэффициенты передачи обмоток управления ЭМУ:
ТОУ1=ТОУ2 = 0,07 с; kОУ1 = kОУ2 = 2,0 - для студентов 1-й акад. группы ТОУ1=ТОУ2 = 0,05 с; kОУ1 = kОУ2 = 1,5 - для студентов 2-й акад. группы
Постоянная времени и коэффициент передачи 2-го каскада ЭМУ:
ТКЗ (задается индивидуально); kКЗ = 4,0.
Постоянные времени (электромеханическая и цепи якоря) и коэффициент передачи двигателя:
ТЭМ (задается индивидуально); ТЯ = 0,015 с; kд = 4,0. Коэффициенты передачи тахогенератора ТГ, потенциометра П,
усилителя и стабилизирующего трансформатора: kТГ = 0,2; kП = 0,95; kУ = 25; kТС = 1.
2. Индивидуальные данные:
Таблица 1
Вари- |
ТКЗ |
ТЭМ |
|
Вари- |
ТКЗ |
ТЭМ |
|
Вари- |
ТКЗ |
ТЭМ |
ант |
|
|
|
ант |
|
|
|
ант |
|
|
1 |
0,055 |
0,01 |
|
7 |
0,025 |
0,04 |
|
13 |
0,045 |
0,07 |
2 |
0,05 |
0,015 |
|
8 |
0,02 |
0,045 |
|
14 |
0,04 |
0,075 |
3 |
0,045 |
0,02 |
|
9 |
0,015 |
0,05 |
|
15 |
0,035 |
0,08 |
4 |
0,04 |
0,025 |
|
10 |
0,01 |
0,055 |
|
16 |
0,03 |
0,085 |
5 |
0,035 |
0,03 |
|
11 |
0,055 |
0,06 |
|
17 |
0,025 |
0,09 |
6 |
0,03 |
0,035 |
|
12 |
0,05 |
0,065 |
|
18 |
0,02 |
0,095 |
4
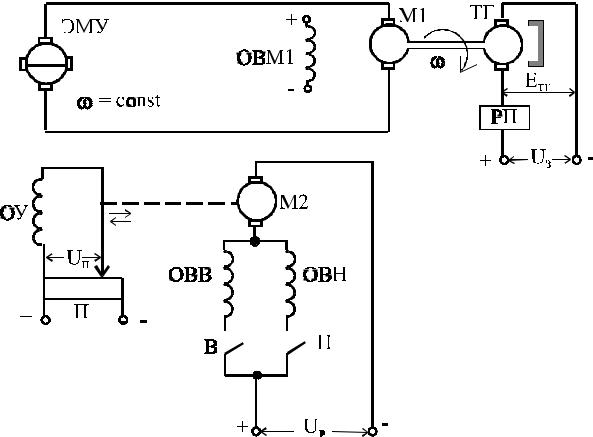
Задание №2: ИССЛЕДОВАНИЕ НЕЛИНЕЙНОЙ САР Произвести исследование устойчивости релейной системы (рис. 2).
Рис. 2. Принципиальная схема релейной САР
Релейная САР предназначена для стабилизации скорости двигателя постоянного тока М1, которая задается уровнем задающего напряжения Uз. Двигатель получает питание от электромашинного усилителя (ЭМУ), обмотка управления которого (ОУ) подключена к напряжению UП потенциометра П. Движок потенциометра перемещается исполнительным двигателем М2, который подключается к напряжению Uр через реверсирующие контакты (В - вперед, Н - назад) трехпозиционного поляризованного реле (РП). Катушка РП включена в цепь сравнения ЭДС тахогенератора ЕТГ и задающего напряжения Uз. Если действительная скорость М1 равна заданной, то ЕТГ = Uз и якорь РП занимает среднее положение. При этом М2 отключен от сети и напряжение UП неизменно - САР работает в установившемся режиме.
При изменении нагрузки у двигателя М1 изменяется частота вращения и пропорционально ей изменяется величина ЕТГ, следовательно, возникает напряжение рассогласования ∆ U = Uз - ЕТГ и через
5
катушку РП начинает протекать ток. Если ∆ U превысит значение +∆ U0 (зона нечувствительности реле), то в зависимости от полярности напряжения ∆ U реле РП замкнет один из своих контактов (В или Н) в цепи якоря двигателя М2. При этом М2 включится и будет изменять напряжение UП в направлении, при котором величина ∆ U будет уменьшаться. Когда ∆ U станет меньше значения +∆ U0, якорь РП займет среднее положение, двигатель М2 отключится и изменение UП прекратится. Подключение обмоток ОВВ или ОВН исполнительного двигателя М2 задает направление вращения его якоря (ВПЕРЕД или НАЗАД).
Исследование релейной САР нужно производить в следующем порядке:
1. Составить структурную схему САР и записать передаточные функции ее звеньев. Постоянной времени ЭМУ, электромагнитной постоянной времени двигателя М1 и постоянной времени двигателя М2 на начальном этапе расчетов можно пренебречь.
2.Используя метод припасовывания, рассчитать и вычертить фазовую траекторию САР (начальные условия задавать самостоятельно). Определить условия устойчивости.
3.С помощью метода гармонической линеаризации определить условия устойчивости САР и параметры автоколебаний. Если автоколебаний нет, то для получения этого режима нужно уточнить матема-
тическую модель системы введением параметров ТЭМУ и ТЭ двигателя М1, которые нужно выбрать самостоятельно.
4.Проверить достоверность полученных результатов путем проверки выполнения условия фильтра в исследуемой системе.
ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА
1. Общие для всех данные:
Зона нечувствительности реле - а = +0,2 - для 1-й акад. группы. Зона нечувствительности реле - а = +0,3 - для 1-й акад. группы.
Электромеханическая постоянная времени двигателя М1 - ТЭМ = 3,0 с. Коэффициент передачи двигателя М1 - k3 = 1,0.
6
2. Индивидуальные данные:
Таблица 2
Ва- |
k1 |
k2 |
ТП |
|
Ва- |
k1 |
k2 |
ТП |
Ва- |
|
k1 |
k2 |
ТП |
ри- |
|
|
|
|
ри- |
|
|
|
ри- |
|
|
|
|
ант |
|
|
|
|
ант |
|
|
|
ант |
|
|
|
|
1 |
1,0 |
3,0 |
1,2 |
|
7 |
1,6 |
4,0 |
1,2 |
13 |
|
1,1 |
5,2 |
0,8 |
2 |
1,1 |
3,2 |
1,15 |
|
8 |
1,7 |
4,2 |
1,15 |
14 |
|
1,2 |
5,4 |
0,9 |
3 |
1,2 |
3,4 |
1,1 |
|
9 |
1,8 |
4,4 |
1,1 |
15 |
|
1,3 |
5,6 |
1,0 |
4 |
1,3 |
3,6 |
1,05 |
|
10 |
1,9 |
4,6 |
1,05 |
16 |
|
1,4 |
5,8 |
1,1 |
5 |
1,4 |
3,8 |
0,9 |
|
11 |
2,0 |
4,8 |
1,0 |
17 |
|
1,5 |
6,0 |
1,2 |
6 |
1,5 |
3,9 |
0,85 |
|
12 |
1,0 |
5,0 |
0,9 |
18 |
|
1,6 |
6,2 |
1,3 |
Здесь ТП, k1 - постоянная времени звена, состоящего из М2 и П, определяемая временем перемещения движка П из одного крайнего положения в другое, и коэффициент передачи этого звена;
k2 - коэффициент передачи ЭМУ.
ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ КУРСОВОЙ РАБОТЫ
КР выполняется в форме пояснительной записки объемом 15-20 стр. формата А4 (210х297 мм). Терминология, обозначения и порядок оформления КР должны соответствовать действующим стандартам и ГОСТам.
Записка должна начинаться с титульного листа, который представляет собой задание на выполнение КР с подписью преподавателя. Затем следует содержание с наименованием всех разделов, подразделов и пунктов с указанием страниц, на которых размещается их начало. Все страницы записки должны быть последовательно пронумерованы, начиная с третьей страницы, на которой размещено содержание. Разделы с выполненными заданиями и список литературы должны начинаться с новой страницы.
7
Записка должна представлять собой рукописный, машинописный или компьютерный вариант текста, который пишется (печатается) на одной стороне листа через 1,5 интервала чернилами или пастой черного, синего или фиолетового цвета. Все схемы и графики должны располагаться в записке среди текста или на отдельных листах. Все листы записки, за исключением титульного, должны иметь оконтуривающую рамку и угловой штамп.
Раздел по каждому заданию должен заканчиваться заключением, в котором нужно подвести итоги проведенных исследований, оценить полученные результаты и указать пути их улучшения.
Список литературы должен включать в себя литературные источники, которые использовались при выполнении КР. Обязательна ссылка в текстовой части записки на эти источники. Схемы, графики и таблицы должны иметь номера и названия.
Допускается выполнение расчетов и получение графиков на компьютере при условии, что все промежуточные расчеты будут представлены в записке.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
1. Бесекерский В.А. Теория систем автоматического регулирования/В.А. Бесекерский, Е.П. Попов. -2-е изд., испр. и доп.-М.: Наука,
1972.-768 с.
2.Воронов А.А. Основы теории автоматического регулирования
иуправления: Учеб. пособие для вузов/ А.А. Воронов, В.К. Титов, Б.Н. Новогранов.-М.: Высш. школа. 1977.-519 с.
3.Егоров К.В. Основы теории автоматического регулирования: Учеб. пособие для вузов. - 2-е изд., перераб. и доп.- М.: Энергия,
1967.-648 с.
4.Задачник по теории автоматического управления/ Под ред. А.С. Шаталова.-М.: Энергия, 1971.-496 с.
5.Иванов А.А. Теория автоматического управления и регулиро-
вания.-М.: Недра, 1970.-352 с.
6.Иванов В.А. Математические основы теории автоматического регулирования: Учеб. пособие для вузов/ В.А. Иванов, В.С. Медведев,
8
Б.К. Чемоданов, А.С. Ющенко; Под ред. Б.К. Чемоданова.-М.: Высш.
школа, 1971.-808 с.
7.Лукас В.А. Теория автоматического управления: Учеб. для вузов.-2-е изд., перераб. и доп.- М.. Недра, 1990.-416 с.
8.Наумов В.Н. Теория нелинейных автоматических систем. Частотные методы.-М.: Наука, 1972.-544 с.
9.Основы теории автоматического регулирования: Учеб. для вузов/ Под ред. В.И. Фумова.-2-е изд., перераб и доп.-М.: Машиностроение, 1984.-368 с.
10.Первозванский А.А. Курс теории автоматического управления: Учеб. пособие-М.: Наука, 1986.-616 с.
11.Подлесный Н.И. Элементы систем автоматического управления и контроля: Учеб./ Н.И. Подлесный, В.Г.Рубанов .- 3-е изд., перераб. и доп.-Киев: Вища школа, 1991.-461 с.
12.Руководство по проектированию систем автоматического управления: Учеб. пособие/ Под ред. В.А. Бесекерского.-М.: Высш.
шк., 1983.-296 с.
13.Сборник задач по теории автоматического регулирования и
управления / В.А. Бесекерский, А.Н. Герасимов и др.; Под ред. В.А. Бесекерского.-5-е изд., перераб.-М.: Наука, 1978.-512 с.
14. Теория автоматического управления: Учеб. для вузов: В 2-х ч. /Под ред. А.А. Воронова.-2-е изд, перераб. и доп.-М.: Высш. шк.,
1986.-367 с.
15. Теория автоматического управления: Учеб. для вузов: В 2-х ч./ Под ред. А.В. Нетушила.-2-е изд., перераб. и доп.-М.:Высш.шк.,
1976.-432 с.
16. Топчеев Ю.И. Задачник по теории автоматического управления: Учеб. пособие для вузов/ Ю.И. Топчеев, А.П. Цыпляков.-М.: Машиностроение, 1977.-592 с.
17. Цыпкин Я.З. Основы теории автоматических систем.-М.:
Наука, 1977.-560 с.
18. Юревич Е.И. Теория автоматического управления: Учеб. для вузов.-2-е изд., перераб и доп.-Л.: Энергия, 1975.-416 с.
9
Составитель ВЕНИАМИН ГЕОРГИЕВИЧ КАШИРСКИХ
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Методические указания к выполнению курсовой работы
для студентов направления 550200 «Автоматизация и управление» и специальности 180400 «Электропривод и автоматика промышленных установок и технологических комплексов»
Редактор Е.Л. Наркевич
ЛР № 020313 от 23.12.96.
Подписано в печать 06.12.2000. Формат 60х84/16.
Бумага офсетная. Отпечатано на ризографе. Уч.-изд.л. 0,5. Тираж 75 экз. Заказ Кузбасский государственный технический университет.
650026, Кемерово, ул. Весенняя, 28.
Типография Кузбасского государственного технического университета.
650099, Кемерово, ул. Д. Бедного, 4А.