

С.М. Простов Изучение конструкции и исследование характеристик индукционного датчика геоконтроля
.pdf10
управления является выключатель питания на блоке аккумуляторов 4. Полезный сигнал через внешний разъем 9 подается на измерительное устройство, в качестве которого можно использовать любой вольтметр постоянного тока.
Настройку датчика осуществляют грубо в процессе его сборки перемещением компенсационной катушки КК на корпусе 5, а точную подстройку при эксплуатации датчика – резистором электронной схемы R13 (рис. 6), доступ к которому обеспечивается через пробку 7.
Блок аккумуляторов Б5 может быть выполнен в искробезопасном и обычном исполнении. Он представляет собой единый моноблок из 12 аккумуляторов типа Д-0,25 с выключателем питания, соединяемый со схемой датчика разъемом.
Основные технические характеристики резонансно-импульсного
индукционного датчика. |
|
|
Рабочая частота, кГц |
50±5 |
|
Расстояние между главными катушками зонда, м |
0,5 |
|
ЭДС сигнала прямого поля, мВ |
1000 |
|
Точность компенсации ЭДС прямого поля, % |
0,05 |
|
Модуль коэффициента передачи усилителя измерительного |
100 |
|
тракта, дБ |
|
|
|
|
|
Диапазон изменения выходных напряжений, мВ |
20-800 |
|
Выходное сопротивление датчика, кОм |
10 |
|
Действующее значение силы тока генераторной катушки, мА |
10 |
|
Напряжение питания, В |
11-15 |
|
Время непрерывной работы без подзаряда, ч, не менее |
20 |
|
Исполнение |
пыле-, влагозащищенное |
|
Габариты, мм: |
диаметр |
50 |
|
длина |
700 |
Длина соединительного кабеля, м |
10 |
|
Масса, кг, не более |
2,5 |
|
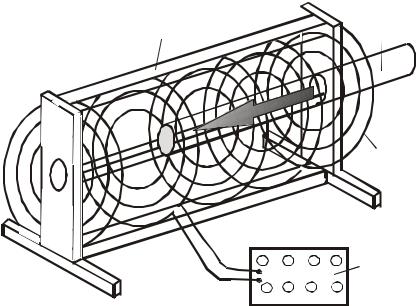
Лабораторные испытания индукционного датчика проводятся на установке, схема которой представлена на рис. 8. Основой установки является система разомкнутых проволочных колец 1, в разрывы которых включают перемычки для их последовательного соединения или магазин электросопротивлений 4.
11
1 |
|
|
|
2 |
|
||||
|
|
|||
|
||||
|
|
3
4
Рис. 8. Установка для лабораторных испытаний индукционного датчика:
1 – каркас, 2 – датчик; 3 – разомкнутое кольцо; 4 – магазин электросопротивлений ММЭС 3026
Удельное электросопротивление ρ моделируемой однородной среды определяют из уравнения (в Ом м)
* ∆r∆x |
|
|
||
ρ = KR |
|
|
, |
(8) |
n |
|
|||
|
∑ l |
к |
|
|
|
к=1 |
|
|
|
где R* – электросопротивление, включаемое в разрыв системы последовательно соединенных колец, Ом; ∆r – разность радиусов соседних колец в плоскости, перпендикулярной оси датчика; ∆x – расстояние
между плоскостями; lк – длина окружности к-го кольца; n – число колец в установке; K – постоянная, учитывающая ограниченность размеров кольцевого интегратора и размеры зоны чувствительности датчика по оси и глубине зондирования.
Для описанной установки ∆x = const = 0,2 м, ∆r = const = 0,1м:
при n = 6 ρ = 53,5 R*, при n = 15 ρ = 13,3 R*.
12
5.Изучение конструкции индукционного датчика и исследование его характеристик
Лабораторная работа № 1 Изучение конструкции индукционного датчика
Изобразить функциональную схему индукционного датчика и изучить работу его элементов.
Изобразить блочную схему датчика, перечислить основные конструктивные элементы.
Выписать основные технические характеристики датчика.
Лабораторная работа №2
Исследование осевой и радиальной характеристик индукционного датчика
Используют лабораторную установку (рис. 8) с кольцами 3 диаметром D = 0,2, 0,4, 0,6, 0,8 м, расположенными в одной вертикальной плоскости. Индукционный датчик 2 перемещают по направляющей вдоль центральной горизонтальной оси колец, при этом магазин сопротивлений 4 подключают в разрыв одного из колец. Устанавливают 3 значения R* = 0,1, 1 и 10 Ом м. Индукционный датчик 2 перемещают с шагом 0,1 м в диапазоне изменения координаты х = -1-1,5 м (координате х = 0 соответствует совмещение переднего торца датчика с плоскостью колец). Выходной сигнал датчика измеряют приборами КП-2 или
MY67-69.
Результаты измерений заносят в табл. 1.
|
|
|
|
|
|
|
|
|
|
|
Таблица 1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D, м |
|
0,2 |
|
0,4 |
|
0,6 |
|
0,8 |
|
||||
R*, Ом |
0,1 |
1 |
10 |
0,1 |
1 |
10 |
0,1 |
1 |
10 |
0,1 |
1 |
10 |
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
х, |
-0,9 |
|
|
|
|
|
|
|
|
|
|
|
|
-0,8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,5 |
|
|
|
|
|
|
|
|
|
|
|
|
13
По замеренным данным строят следующие графические зависимости:
-для каждого значения D по 3 графика осевой чувствительности
Е(х, R*);
-3 графика радиальных характеристик Е( D 2 ) для сечений напротив генераторной (х = 0,1 м), компенсационной (х = 0,3 м) и
2 ) для сечений напротив генераторной (х = 0,1 м), компенсационной (х = 0,3 м) и
приемной (х = 0,5 м) катушек ( Е - суммарное значение Е для трех заданных значений R*).
Графики строят на миллиметровой бумаге.
Сделать вывод, как качественно изменяется чувствительность индукционного датчика вдоль его оси и при удалении от нее в указанных выше сечениях.
Лабораторная работа № 3 Тарировка индукционного датчика
В лабораторной установке (рис. 8) все кольца 3 (n = 15, D = 0,2, 0,6, 0,8 м) соединяют перемычками последовательно, в разрыв полученной системы колец включают магазин сопротивлений 4. Датчик 2 помещают на направляющую по оси колец в среднюю часть установки. Измеряют величину выходного сигнала датчика Е при изменении R* от 0 до значения, соответствующего пределу чувствительности (Епр = 15-20 мВ), при этом шаг изменения R* выбирают таким, чтобы соответствующее изменение Е составляло 3-5 %.
Величину ρ определяют из уравнения (8). Результаты измерений заносят в табл. 2.
Таблица 2
R, Ом
ρ, Ом м
Е, мВ
По замеренным данным строят график общей тарировочной зависимости Е(ρ) в логарифмическом масштабе.
Разделяют построенный график на низкоомную (Еmax > E > Emin) и
высокоомную (Emin > E > Eпр) ветви и строят их графики отдельно в линейном масштабе.
14
Лабораторная работа № 4
Физическое моделирование геоконтроля аномального по электросопротивлению слоя индукционным методом
В лабораторной установке (рис. 8) кольца 3 разделяют на 3 группы по 6 колец (n = 6). Все кольца в группе соединяют последовательно перемычками. В разрыв крайних групп колец включают постоянное сопротивление R = 1 Ом, в разрыв средней группы – магазин сопротивлений 4. Величину R* магазина сопротивлений устанавливают равной 0,1 и 0,3 Ом ("низкоомное" включение), 3 и 10 Ом ("высокоомное" включение). Индукционный датчик 2 перемещают по направляющей от х = 0 (передний торец датчика совпадает с первой плоскостью колец крайней группы) до х = 1 м с шагом 0,05 м.
Результаты измерений заносят в табл. 3.
Таблица 3
х, м |
0 |
0,05 |
0,1 |
0,15 |
… |
|
R*, |
0,1 |
|
|
|
|
… |
0,3 |
|
|
|
|
… |
|
Ом |
3 |
|
|
|
|
… |
|
10 |
|
|
|
|
… |
По результатам измерений строят совмещенные графики
Е(x,R*).
Сделать вывод о соответствии границ геоэлектрической аномалии границам включения (плоскости этих границ считать расположенными посередине между соответствующими группами колец).
6. Порядок работы
Для выполнения лабораторных работ в учебной группе формируются звенья по 4-6 студентов. Каждое звено самостоятельно выполняет лабораторные работы №1-4 (п. 5) и представляет коллективный отчет (п. 8). Преподаватель (лаборант) выдает студентам индивидуальные задания для испытаний, проводит инструктаж, а также контролирует правильность выполнения работы.
15
7.Правила техники безопасности
7.1.Не допускается использовать составляющие элементы установки в целях, не предусмотренных лабораторной работой.
7.2.Не допускается прилагать чрезмерные усилия при проведении
замеров.
8. Требования к отчету
Отчет по каждой лабораторной работе (п. 5) оформляют на отдельных листах формата А4 с рамкой и малым штампом. Все отчеты сшивают в брошюру с титульным листом.
Отчет должен содержать:
-цель работы;
-обработанные результаты лабораторных работ №№ 1-4;
-краткий письменный ответ на пять контрольных вопроса по заданию преподавателя.
Контрольные вопросы
1.В чем состоит принцип ИК?
2.Из каких основных узлов состоит аппаратура ИК?
3.Какие фундаментальные уравнения лежат в основе теории ИК?
4.Какие параметры входят в основную теоретическую зависимость ИК?
5.Какие виды составляющих можно измерять при ИК?
6.Какие конструктивные параметры датчика ИК в наибольшей степени влияют на его чувствительность?
7.Для измерений каких параметров породного массива используют ИК?
8.Что такое "скин-слой"?
9.Для каких целей датчик ИК используют при геоконтроле?
10.Из каких блоков состоит датчик ИК?
11.Какие блоки включает функциональная схема датчика ИК?
12.Из каких частей состоит кольцевой интегратор?
13.Для чего нужна лабораторная тарировочная зависимость?
14.Для чего нужна лабораторная осевая характеристика?
15.Для чего нужна лабораторная радиальная характеристика?
16.С какой целью исследуют пересечение датчиком аномальной
16
зоны?
17.Чем вызвана асимметрия осевой и радиальных характеристик?
18.Из каких ветвей состоит тарировочная зависимость?
19.Чем ограничивается сигнал ГК?
20.От чего зависит глубина зондирования?
Список рекомендуемой литературы
1.Плюснин М.И. Индукционный каротаж.– М.: Недра, 1973.–
142с.
2.Простов С.М. Электромагнитный бесконтактный геоконтроль / С.М. Простов, В.В. Дырдин, В.А. Хямяляйнен.– Кемерово, 2002.– 132 с.
Составители
Сергей Михайлович Простов Евгений Анатольевич Мальцев
ИЗУЧЕНИЕ КОНСТРУКЦИИ И ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК ИНДУКЦИОННОГО ДАТЧИКА ГЕОКОНТРОЛЯ
Методические указания к лабораторным работам по дисциплине "Геоэлектрический контроль массива горных пород"
для студентов специальности 070600 "Физические процессы горного производства"
Редактор З.М. Савина
Подписано в печать 16.05.03 Формат 60×84/16.
Бумага офсетная. Отпечатано на ризографе. Уч.-изд. л. 1,00 Тираж 50 экз. Заказ
ГУ КузГТУ.
650026, Кемерово, ул. Весенняя,28 Типография ГУ КузГТУ.
650099, Кемерово, ул.Д. Бедного,4 А