

Е.К. Соколова Методика определения усилий разрушения на резце и скалывающем диске с помощью тензометрической головки
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение высшего профессионального образования
"КУЗБАССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ"
Кафедра теоретической и геотехнической механики
МЕТОДИКА ОПРЕДЕЛЕНИЯ УСИЛИЙ РАЗРУШЕНИЯ НА РЕЗЦЕ И СКАЛЫВАЮЩЕМ ДИСКЕ
С ПОМОЩЬЮ ТЕНЗОМЕТРИЧЕСКОЙ ГОЛОВКИ
Методические указания к лабораторной работе № 6 по дисциплине "Механическое разрушение" для студентов
специальности 070600 "Физические процессы горного производства"
Составитель Е. К. Соколова
Утверждены на заседании кафедры Протокол № 15 от 12.05.03 Рекомендованы к печати учебнометодической комиссией специальности 070600 Протокол № 13 от 12.05.03
Электронная копия находится в библиотеке главного корпуса ГУ КузГТУ
Кемерово 2003
1
Введение
Изучение закономерностей процесса разрушения невозможно без выполнения точных замеров составляющих усилия разрушения, возникающих непосредственно на инструменте.
Существующие тензодинамометры для измерения усилий, действующих на разрушающий инструмент, обладают некоторыми недостатками.
Недостатком динамометра с тензодатчиками, включающего корпус с кольцевыми проточками под чувствительные элементы и закрепленного на основании рабочего органа, является малая точность при измерении вследствие взаимного влияния составляющих усилия резания.
В трехкомпонентном тензодинамометре на тензометрических столбах составляющие усилия на инструменте передаются на тензоэлементы через точечные контакты. Это вызывает большие контактные напряжения и интенсивный износ сопрягаемых деталей. Зазор между деталями, образующийся за счет смятия, устраняется регулировкой специальных винтов или колпачков. Вследствие неточного контакта возникает взаимовлияние составляющих усилия разрушения, что приводит к неточности измерений.
1. Цель и содержание работы
Для повышения точности замеров составляющих усилия разрушения на инструменте, устранения регулировочных работ и упрощения конструкции на кафедре горных машин и комплексов КузГТУ разработана тензометрическая головка, не имеющая подвижных элементов, - тензометрические стержни и основание выполнены в виде жесткой системы. Для исследования процесса разрушения горных пород одиночным разрушающим инструментом спроектирован и изготовлен объемный лабораторный стенд.
Целью работы является:
1.Знакомство с оборудованием и аппаратурой для проведения лабораторных исследований процесса разрушения массива одиночным резцом или дисковым скалывающим инструментом.
2
2.Определение жесткости тензометрической головки для учета влияния упругих деформаций на точность измерений.
3.Знакомство с методикой определения составляющих усилия резания при разрушении массива резцовым инструментом с помощью тензометрической головки.
4.Знакомство с методикой определения составляющих усилия разрушения на дисковом скалывающем инструменте с помощью тензометрической головки.
5.Установление влияния конструктивных параметров инструмента
ипараметров разрушения на силовые показатели процесса разрушения.
6.Установление влияния углов наклона и разворота скалывающего
дискового инструмента на силовые показатели процесса разрушения. 7. Определение влияния параметров серповидной стружки на ка-
чественную картину разрушения массива и на энергоемкость процесса разрушения.
2.Оборудование и аппаратура для проведения исследований
2.1.Лабораторный стенд
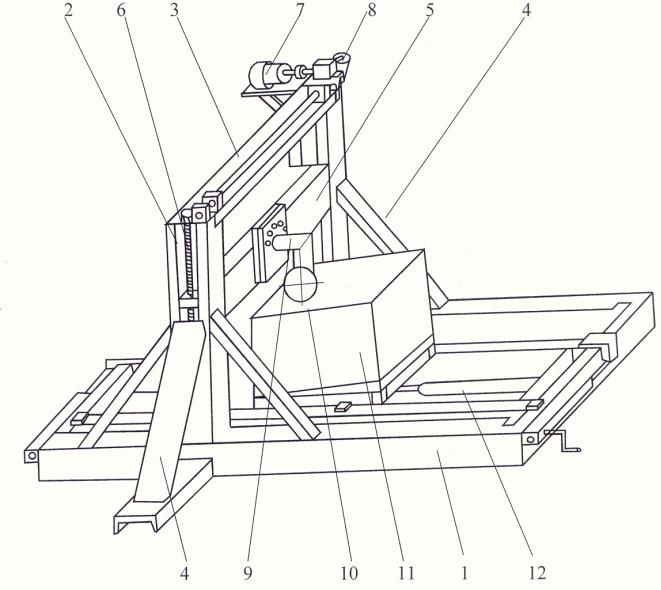
Конструкция объемного лабораторного стенда для исследования процесса разрушения горных пород одиночным разрушающим инструментом представлена на рис. 2.1.
Неподвижная часть стенда состоит из сварной рамы 1, к которой присоединены две боковые стойки 2, образующие совместно с поперечиной 3 портал. Жесткость портала обеспечивается укосинами 4. В стойках 2 выполнены направляющие для траверсы 5, которая при помощи ходовых винтов 6 может перемещаться в вертикальном направлении. Привод ходовых винтов осуществляется от электродвигателя через червячный редуктор, цепную 7 и вторую червячную передачу 8.
В средней части траверсы установлена плита с тензометрической головкой 9, на которой крепится породоразрушающий инструмент 10 (резец или дисковый скалывающий инструмент).
Разрушаемый породный блок закреплен на тележке 11, которая через катки опирается на продольные направляющие, расположенные
3
внутри рамы 1. Привод тележки с блоком в направлении резания осуществляется гидроцилиндром 12, для работы которого используется насосная маслостанция производительностью 50 или 100 л/мин. Поперечное перемещение блока совместно с направляющими и гидроцилиндром производится винтовыми домкратами с ручным приводом.
Рис. 2.1. Стенд для моделирования процесса разрушения массива рабочим инструментом:
1 – основание стенда; 2 – боковые стойки; 3 – поперечина; 4 – укосины; 5 – траверса; 6 – ходовой винт; 7 – цепная передача; 8 – червячная передача; 9 – тензометрическая головка; 10 – рабочий инструмент; 11 – тележка с угольным блоком; 12 – гидроцилиндр привода тележки
4
Работает стенд следующим образом. При помощи винтов поперечной подачи 2 устанавливается требуемый шаг резания, а перемещением траверсы 5 с тензометрической головкой и инструментом при помощи механического привода задается требуемая глубина резания.
При подаче жидкости в гидроцилиндр разрушаемый блок перемещается в направлении портала и вступает в контакт с инструментом, происходит резание массива.
Усилия, возникающие на инструменте в процессе резания массива, воспринимаются тензостержнями и регистрируются аппаратурой, включающей шлейфовый осциллограф К-115 и усилитель "Топаз".
После рабочего хода блока траверса поднимается на высоту, исключающую контакт инструмента с разрушающим массивом, и блок возвращается в исходное положение. Затем при помощи измерительного инструмента определяются фактические параметры осуществленного реза ( глубина и шаг резания) по всей длине стружки и производится настройка на новый цикл.
Конструкция крепления блока на тележке позволяет изменить угол наклона разрушаемой поверхности в направлении резания. За счет этого можно получить переменную глубину реза и имитировать переменное сечение стружки, наблюдаемое при работе исполнительных органов горных машин.
Поворотом тензометрической головки с инструментом относительно оси, совпадающей с направлением резания, можно имитировать угловые резы, наблюдаемые в кутковой части исполнительных органов горных комбайнов.
2.2. Тензометрическая головка
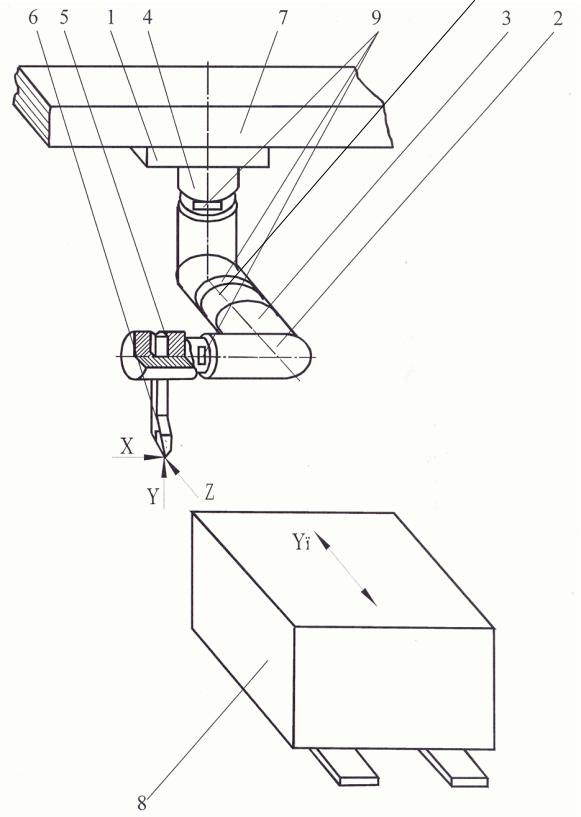
Тензометрическая головка (рис. 2.2) включает основание 1, с которым жестко соединены три взаимно перпендикулярных стержня 2-4.
Стержень 2 является одновременно опорой, на которой с помощью стопора 5 крепится резец 6 (или дисковый скалывающий инструмент). Основание 1 жестко крепится к траверсе 7 лабораторного стенда, которая в зависимости от конструкции рабочего органа или стенда мо-
5
жет быть неподвижной при перемещающемся блоке 8 породы или угля либо подвижной при жестком закреплении блока.
Каждый из стержней 2-4 имеет проточки для наклейки тензодатчиков 9, регистрирующих крутящие и изгибающие моменты в каждом стержне, возникающие при разрушении блока инструментом.
Стержни с наклеенными тензодатчиками являются тензостержнями. Ось тензостержня 2 параллельна боковому усилию X, тензостержня 3 – усилию резания Z, а ось тензостержня 4 – усилию подачи Y.
При исследовании процесса разрушения на стенде блок 8 угля или породы перемещается в направлении скорости подачи VП или усилия резания Z. При этом инструмент 6 осуществляет резание, и на нем возникают усилия X, Y и Z, под действием которых в тензометрических стержнях возникают упругие деформации, приводящие к изменению сопротивления тензодатчиков 9, что позволяет произвести регистрацию крутящих и изгибающих моментов в тензостержнях 2-4.
Получаемый электрический сигнал усиливается в усилителе 8АНЧ-7м, преобразуется в световой сигнал с помощью гальванометров типа М004, шлейфового осциллографа К-115 и регистрируется на светочувствительной бумаге.
Для исключения взаимного влияния одновременно возникающих деформаций кручения, сжатия и растяжения датчики, регистрирующие деформации кручения, наклеиваются под углом 450 к оси тензостержней и включаются по мостовой схеме.
Поскольку модуль упругости металлов не зависит от скорости нагружения, тарировка тензометрических датчиков проводится в статических условиях. Для определения степени влияния составляющих усилия разрушения на регистрируемые деформации тензодатчиков при тарировке каждой из составляющих включается вся схема.
Отклонения, возникающие при взаимном влиянии составляющих разрушения, не должны превышать 0,5 %. Тарировочные графики для всех составляющих должны быть прямолинейными.
Для учета влияния упругих деформаций, возникающих в тензометрических стержнях, на точность измерений определяют жесткость тензометрической головки.
6
Рис. 2. 2. Тензометрическая головка 1 – основание; 2-4 – тензостержни; 5 – стопор; 6 – резец
(скалывающий дисковый инструмент); 7 – траверса стенда; 8 – блок угля (породы); 9 – тензодатчики
7
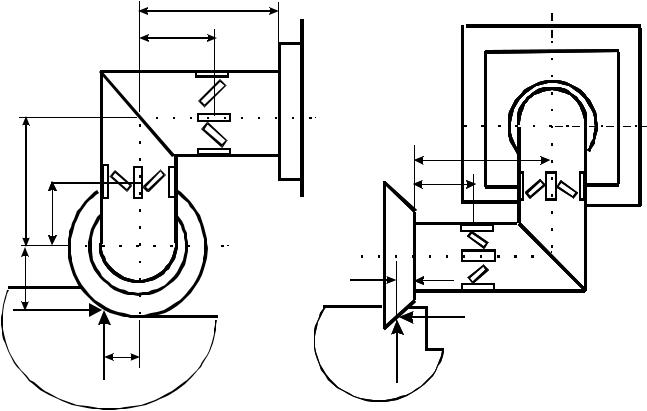
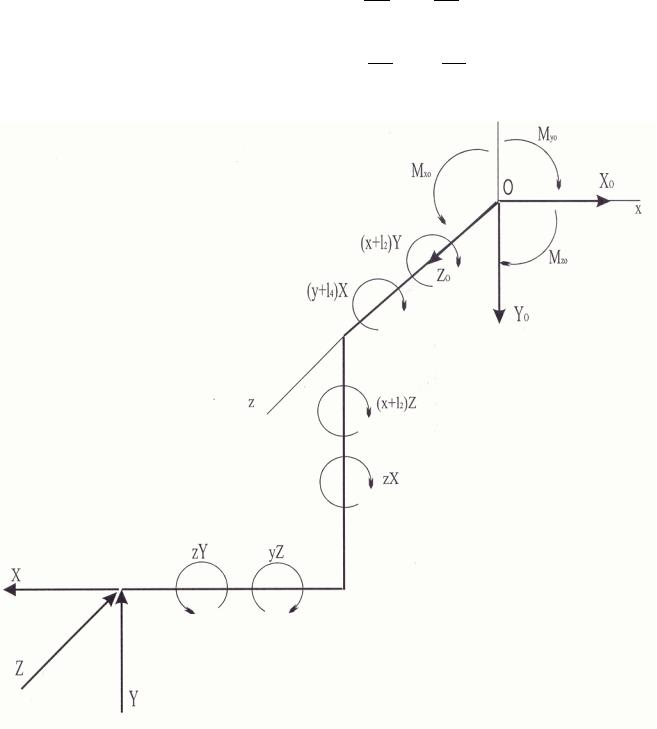
Для упрощения расчетной схемы нагрузки тензометрической головки система сил, приложенная в точке контакта инструмента с блоком (рис. 2.3), приведена к оси стержня (рис. 2.4).
Из условий равновесия определяют опорные реакции XО, YО, Z и изгибающие реактивные моменты МXо, МYо, МZо, возникающие в жесткой заделке (точка О – место крепления тензометрической головки к поперечине стенда):
X O = X ; YO = Y; ZO = Z; |
|
|
M Xo = (y +l4 )Z −(z +l6 )Y; |
(2.1) |
|
MYo = (x +l2 )Z +(z +l6 )X ; |
||
|
||
M Zo = (x +l2 )Y +(y +l4 )X . |
|
Эпюры опорных реакций и изгибающих реактивных моментов представлены на рис. 2.5, 2.6.
Кроме того, в стержнях тензоголовки возникают крутящие момен-
ты:
M крX |
= yZ − zY; |
|
Мкр |
= (x +l2 )Z + zX ; |
(2.2) |
Y |
|
|
МкрZ = (x +l3 )Y +(y +l4 )X . |
|
|
Эпюры крутящих моментов представлены на рис. 2.7.
Из универсального уравнения упругой линии определяют прогибы, возникающие в местах наклейки датчиков:
EI x y = EI x yo + EI xϕo z + ∑n1 mi |
(z − ai )2 |
+ n∑2 pi |
(z −bi )2 |
+ |
||||
|
|
i=1 |
|
2 |
|
i=1 |
6 |
(2.3) |
+ ∑n3 qi |
(z −ci )4 |
− n∑4 qi |
(z − di )4 |
|
|
|
||
, |
|
|
|
|||||
i=1 |
24 |
i=1 |
|
2 |
|
|
|
|
где mi – сосредоточенные моменты, Нм; pi – сосредоточенные силы, Н;
qi – интенсивности равномерно распределенных нагрузок, Н/м; yo – прогиб балки в начале координат, м;
z – координата рассматриваемого сечения, м;
8
ϕo – угол наклона касательной к упругой линии в начале координат, град;
ai, bi, ci, di – расстояния от начала координат до места приложения соответствующих внешних нагрузок, м;
E – модуль упругости первого рода, Па;
Ix – осевой момент инерции сечения относительно оси изгиба, м4. l6
l5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l2 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
l4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l1 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
l3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
z |
|
|
|||
|
|||
Z |
|
X |
|
|
|||
|
|||
|
|||
z |
|||
|
|||
Y |
|
Y |
|
Рис. 2.3. Тензометрическая головка с тензодатчиками и дисковым скалывающим инструментом
Так как начало координат взято в сечении, совпадающем с жесткой заделкой (точка О), имеем: ϕo = 0; xo = 0; yo = 0; zo = 0.
Учитывая координаты наклейки тензодатчиков, а также принимая во внимание уравнения равновесия тензоголовки, определяют прогибы в каждом стержне.
Для стержня I прогибы возникают по осям y и z:
9
EI zI yI = EI zI yo + EI zI ϕo x + M zo x22 +Yo x63 ;
(2.4)
EI yI zI = EI yI zo + EI yIϕo y + M yo x22 + Zo x63 ;
Рис. 2.4. Расчетная схема нагружения тензометрической головки