

Paragraf_5
.pdf§ 5. Ориентация плоскости и пространства
Рассмотрим задачу. На плоскости или в пространстве даны два базиса. Требуется найти зависимость между координатами одного и того же вектора в этих базисах. Эти зависимости и носят название формул перехода от одного базиса ко второму. Условимся,
координаты вектора в первом базисе снабжать индексом 1, а во втором - индексом 2;
например, a{ 1; 2}1; b{ 1; 2}2. Все рассуждения проведем вначале для случая плоскости, затем рассмотрим пространственный случай.
Пусть даны два базиса e1,e2 и e1,e2. Известны координаты векторов второго базиса относительно первого: e1{a1;a2}1;e2{b1;b2}1:
(5.1)
Эти координаты представляют необходимые для решения задачи данные о взаимном расположении базисов друг относительно друга. Так как векторы e1 и e2 линейно независимы, то
a1 |
a2 |
0. |
(5.2) |
b1 |
b2 |
|
|
Пусть a - произвольный вектор плоскости, координаты которого относительно данных
базисов равны: a{ 1; 2}1,a{ 1; 2}2 . |
Вектор а представим в виде: a 1e1 2e2. |
Заменим векторы второго базиса e1 и |
e2 на их разложения по векторам первого (см. |
(5.1)): |
|
a1(a1e1 a2e2 ) 2(b1e1 b2e2 ) (a1 1 b1 2 )e1 (a2 1 b2 2 )e2.
Сдругой стороны, a 1e1 2e2. Из теоремы о разложении вектора плоскости по
векторам базиса (см. теорему 2 § 3) следует, что
|
|
, |
1 a1 1 |
b1 2 |
|
|
|
(5.3) |
2 a2 1 b2 2.
Соотношения (5.3) представляют собой искомые формулы перехода от первого базиса ко второму. Если известны координаты a во втором базисе, то с помощью этих соотношений можно вычислить его координаты в первом. Наоборот, если даны координаты a в первом базисе, то рассматривая формулы перехода (5.3) как систему
1

двух линейных уравнений с неизвестными 1 и 2, решив ее, найдем координаты вектора во втором. Заметим, что в силу (5.2) такая система всегда совместна.
Определение 1. Даны два базиса. Матрица, столбцы которой равны
координатам векторов второго базиса относительно первого, называется матрицей перехода от первого базиса ко второму.
|
|
Если первый базис обозначать как B1, а второй - |
B2 , то матрица перехода будет |
||||||||||||||||||||||
обозначаться нами как (B1 |
|
B2 )а ее определитель - |
|
B1 |
|
B2 |
|
. Таким образом, если B1 :e1,e2, |
|||||||||||||||||
|
|
|
|
||||||||||||||||||||||
а B |
|
:e |
|
,e |
|
|
} ,e |
|
{b ;b } , то |
(B |
|
B |
|
) |
|
a1 |
b1 |
|
. Если известна матрица |
||||||
|
|
|
|
||||||||||||||||||||||
|
2 |
1 |
|
2 |
1 1 |
2 1 |
|
|
2 1 2 1 |
1 |
|
|
2 |
|
|
|
|
a |
|
|
b |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
перехода, то можно составить формулы перехода (5.3). Из соотношения (5.2) вытекает,
что B1 B2 0.
Докажем свойства матриц перехода.
Свойство 1. Пусть даны базисы B1,B2 , и B3. Тогда (B1 B3 )=(B1 B2 )(B2 B3 ).
Доказательство. |
Пусть базисы B1,B2 , и B3 состоят из векторов |
|||
|
|
;B3 |
|
, а матрицы перехода имеют следующий вид: |
B1 :e1,e2;B2 :e1 |
,e2 |
:e1,e2 |
||
(B |
|
B |
|
a |
b |
|
, (B |
|
|
|
c |
d |
1 |
|
||
|
|
) |
1 |
1 |
|
|
|
B ) |
1 |
|
. |
|||||
1 |
|
|
2 |
a |
2 |
b |
|
|
2 |
|
3 |
c |
2 |
d |
2 |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||
Отсюда |
|
e1 a1e1 a2e2 , |
(5.5) |
e2 b1e1 b2e2. |
|
e1 c1e1 c2e2 , |
(5.6) |
e2 d1e1 d2e2. |
Подставим выражения (5.5) в формулу (5.6):
e1 c1(a1e1 a2e2 ) c2(b1e1 b2e2 ) (c1a1 c2b1 )e1 (c1a2 c2b2 )e2 , e2 d1(a1e1 a2e2 ) d2(b1e1 b2e2 ) (d1a1 d2b1 )e1 (d1a2 d2b2 )e2 ,
Мы нашли коэффициенты разложения векторов e1 и e2 по векторам первого базиса,
следовательно,
(B |
|
|
c a |
c |
|
b |
c a |
2 |
c |
|
b |
|
|
|||||
|
B ) |
1 1 |
2 1 |
1 |
|
|
2 2 |
. |
||||||||||
1 |
|
3 |
d a |
d |
2 |
b |
d |
a |
2 |
d |
2 |
b |
2 |
|
||||
|
||||||||||||||||||
|
|
|
|
1 |
1 |
|
1 |
1 |
|
|
|
|
|
|||||
Полученная матрица совпадает с произведением:
2

(B |
|
B |
|
)(B |
|
|
|
a |
b |
c |
d |
1 |
|
c a |
c |
|
b |
c a |
2 |
c |
|
b |
|
||||
|
|
|
|
B ) |
1 |
1 |
|
1 |
|
|
|
1 1 |
2 1 |
1 |
|
|
2 2 |
. |
|||||||||
1 |
|
|
2 |
|
2 |
|
3 |
a |
2 |
b |
c |
2 |
d |
2 |
|
d a |
d |
b |
d |
a |
2 |
d |
b |
|
|||
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
1 1 |
|
2 1 |
1 |
|
|
|
2 2 |
|
|||||
Свойство доказано.
Из курса алгебры известно, что определитель произведения двух квадратных
матриц равен произведению их определителей. Поэтому из свойства 1 следует: |
|
||||||||||||||||||||||
Свойство 2. Определитель матрицы перехода от базиса B1 к базису |
B3. равен |
||||||||||||||||||||||
произведению определителей матриц перехода от B1 к B2 и от B2 к B3: |
|
||||||||||||||||||||||
|
B1 |
|
B3 |
|
|
|
|
B1 |
|
B2 |
|
|
|
B2 |
|
B3 |
|
. |
(5.7) |
||||
|
|
|
|
|
|
|
|
|
|||||||||||||||
Cвойство 3. Для любого базиса В |
|
||||||||||||||||||||||
|
|
|
|
|
|
B |
|
B |
|
1. |
(5.8) |
||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
Доказательство. Пусть базис В составляют векторы e1,e2. Столбцы матрицы BB
образуют координаты векторов e1,e2 в базисе e1,e2 Но e1{1;0}1,e2{0;1}1. Поэтому
B |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
0 |
B |
|
B |
|
1. |
|
|||||||||||||||||||||||||
B |
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Свойство 4. Пусть даны базисы B1 |
и B2. Тогда |
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
B |
|
B |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
. |
|
|
(5.9) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
B |
2 |
|
B |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||||
Доказательство. Из равенства (5.7) имеем: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
B1 |
|
B2 |
|
|
|
B2 |
|
B1 |
|
|
|
B1 |
|
B1 |
|
. |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
Отсюда из формулы (5.8) следует, что |
|
B1 |
|
B2 |
|
|
|
B2 |
|
B1 |
|
1. Равенство (5.9) доказано. |
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
Определение 2. Два базиса называются одинаково ориентированными, если определитель матрицы перехода от первого базиса ко второму положителен.
В этом случае будем также говорить, что ориентации базисов совпадают, или они имеют одну и ту же ориентацию. Если базисы не имеют одинаковой ориентации, то говорят, что их ориентации различны или противоположны.
Пример 2. Дан треугольник АВС, О - точка пересечения его медиан. Найти матрицу перехода от базиса e1 AB, e2 AC к базису e1 OC,e2 OA. Выяснить,
имеют ли эти базисы одинаковую ориентацию.
3

Решение.
Найдем координаты векторов e1 OC,e2 OA в
базисе e1 AB, e2 AC . Пусть М и N - середины
сторон АВ и ВС (рис. 1). Тогда MC 1e1 e2. Так
2
|
2 |
|
1 |
|
2 |
||
как OC |
|
MC , то OC |
|
e1 |
|
|
e2 . |
3 |
3 |
3 |
|||||
B
|
|
|
|
|
e1 |
|
|
M |
N |
|
|
|
|
O |
|
|
|
|
|
|
e |
e |
|
2 |
1 |
|
|
A |
|
|
C |
|
|
||
|
|
|
|
|
|
e2 |
|
|
|
Рис. 1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
1 |
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Таким образом, |
e1 |
{ |
|
|
|
; |
|
}. |
AN |
|
e1 |
|
|
e2 |
, |
OA |
|
|
AN. |
|
|
|
|
Следовательно, |
||||||||||||||
3 |
3 |
2 |
2 |
3 |
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|||||
|
|
|
1 |
e |
|
1 |
e .e { |
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
; |
}. Искомая матрица перехода имеет вид: |
3 |
3 |
. |
||||||||||||||||||||||||||||||
OC |
||||||||||||||||||||||||||||||||||||||
3 1 |
3 2 2 |
3 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|||||
Ее определитель равен 1. Так как он положителен, то базисы имеют одинаковую
3
ориентацию.
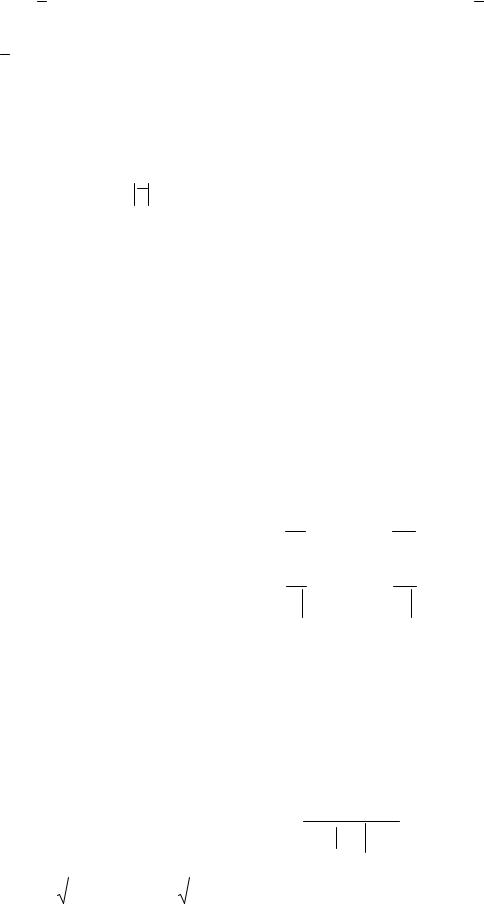
Пример 2. Даны два базиса e1,e2 и e1 ,e2 , удовлетворяющие следующим
требованиям: векторы e1 и e1 сонаправлены, и если векторы этих базисов отложить
от одной точки О, то e2 и e2 лежат в различных полуплоскостях относительно
прямой, проходящей через О и параллельной e1. Доказать, что ориентации базисов противоположны.
Решение.
4
Так как e1 e1 (рис. 2), то координаты вектора
e1 в первом базисе имеют вид: e1 { ;0}1, где
. Пусть OA e2 . Обозначим через а прямую,
проходящую через О, параллельную e2 , а через b - прямую, содержащую А и параллельную e1.
Будем считать, что а и b пересекаются в точке A .
|
OA |
|
|
Тогда e2 |
|
A A. Так как по построению |
e2 e1 e2. Числа и - координаты вектора
e2
|
|
|
|
e |
e |
||
1 |
|
1 |
|
O |
|
|
|
|
|
||
|
e |
|
|
|
|
2 |
|
A |
A |
|
Рис. 2 |
OA e1 , то |
A A e1,OA e2 и |
e2 в первом базисе. Так как векторы
e2 и e2 , отложенные от точки О, лежат в разных полуплоскостях относительно прямой,
проходящей через О и параллельной e1, то векторыe2 и OA противоположно
направлены. Поэтому < 0. Матрица перехода от первого базиса ко второму имеет вид:
|
|
|
|
|
. |
|
0 |
|
|
|
|
Число служит ее определителем. Так как , а < 0, то < 0. Ориентации базисов различны.
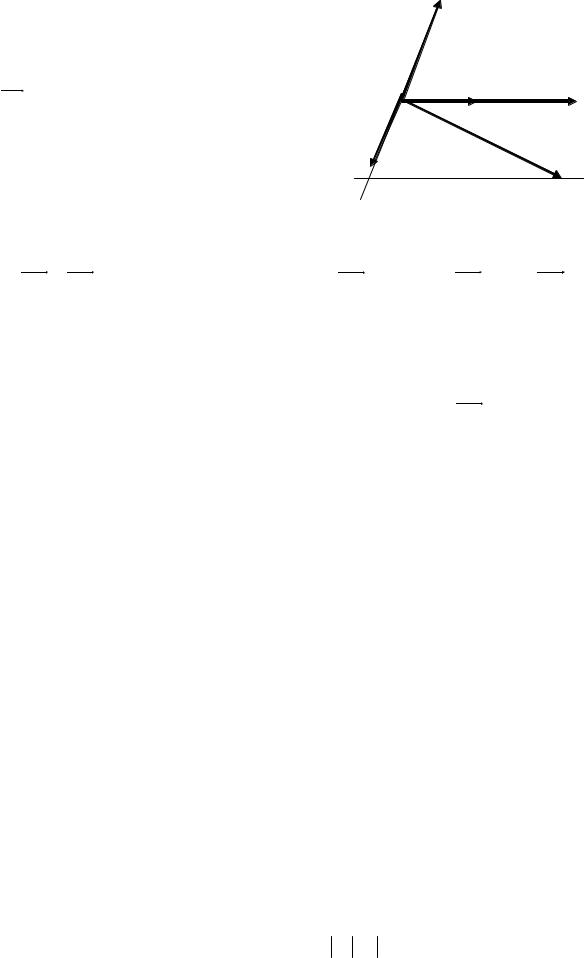
Справедливо утверждение, которое позволяет по чертежу определить, имеют ли два базиса одну и ту же ориентацию или она у них различна. Отложим векторы e1 и e2
первого базиса от точки О, а второго e |
иe |
- от точки O’. Если кратчайшие повороты от |
|||||
|
|
|
|
|
1 |
2 |
|
e |
к e |
2 |
и от e |
к e |
либо одновременно видны по ходу движения часовой стрелки, либо |
||
1 |
|
1 |
2 |
|
|
|
|
против ее движения, то ориентация базисов совпадают. Если для одного базиса такой поворот виден по ходу движения часовой стрелки, а для другого - против движения, то их ориентации различны. Это утверждение примем без доказательства.
Определим на множестве базисов следующее бинарное отношение. Базис B1
находится в бинарном отношении с B2 , если их ориентации одинаковы. Таким образом, B1 B2 в том и только в том случае, когда B1 B2 0.
Теорема 1. Бинарное отношение является отношением эквивалентности.
5
Доказательство. Проверим, что отношение подчиняется условиям
рефлексивности, симметричности и транзитивности.
Рефлексивность. Необходимо проверить, что любой базис находится в отношении
сам с собой. Согласно свойству 3, для любого базиса В плоскости выполнено
соотношение |
|
B |
B |
1. Следовательно, |
B |
B |
|
0, т.е. B B. |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
Симметричность. Даны базисы B1 |
|
|
и B2 , для которых известно, что B1 B2 . |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Требуется доказать, чтоB2 B1. По условию |
|
B1 |
|
B2 |
|
0. Но из свойства 4 |
вытекает, что |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
B |
|
|
B |
|
|
|
|
|
1 |
|
|
|
|
. Поэтому |
|
|
|
B |
|
|
B |
|
|
|
|
0 и B |
|
|
B . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
2 |
|
1 |
|
|
|
|
B |
|
B |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
Транзитивность. Даны |
базисы B1,B2 ,B3, |
удовлетворяющие условиям B1 B2, |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
B2 B3. Требуется доказать, |
|
|
|
что |
B1 B3. |
Нам дано: |
|
B1 |
|
B2 |
|
0 и |
|
B2 |
|
B3 |
|
|
0. Согласно |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
свойству 2, |
|
|
B1 |
|
B3 |
|
|
|
B1 |
|
B2 |
|
|
|
B2 |
|
|
|
B3 |
|
|
. Поэтому |
|
|
B1 |
|
B3 |
|
0. Теорема доказана. |
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так как - отношение эквивалентности, то множество всех базисов плоскости разбивается на классы эквивалентностей. Два базиса принадлежат одному классу в том и только в том случае, когда они одинаково ориентированны. Докажем, следующую
теорему.
Теорема 2. Число классов эквивалентности, на которое отношение разбивает
множество базисов плоскости равно двум.
Доказательство. Пусть В - произвольный базис плоскости. Обозначим через K1
тот класс эквивалентности, которому он принадлежит. Базис B содержится в K1 тогда и только тогда, когда B B . Теорема будет доказана, если мы покажем, что все базисы,
ориентация которых противоположна В, также принадлежат одному классу эквивалентности. Предположим, что ориентации базисов B1 и B2 противоположны
ориентации В. Тогда |
B |
B1 |
0 и |
B2 |
B |
0. |
Но из равенства (5.7) следует, что |
|||||||||||||||||||||||
|
B2 |
|
B1 |
|
|
|
B2 |
|
B |
|
|
|
B |
|
B1 |
|
. Таким образом, |
|
|
B2 |
|
B1 |
|
0. |
Любые два базиса, противоположно |
|||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ориентированные базису В, эквивалентны между собой, т.е. содержатся в одном классе.
Теорема доказана.
Определение 3. Плоскость называется ориентированной, если на множестве ее базисов зафиксирован один из классов эквивалентности.
6
В этом случае также говорят, что на плоскости задана ориентация. Базис,
принадлежащий выбранному классу, называют правым. Если он не принадлежит этому классу, то носит название левого. При задании ориентации классы эквивалентности абсолютно равноправны. Ориентацию на плоскости можно задать, выбрав некоторый базис. Тем самым будет зафиксирован класс эквивалентности, которому этот базис принадлежит. Обычно ориентацию задают с помощью такого базиса, для которого поворот от первого базисного вектора ко второму, при условии, что они отложены от одной точки, виден против движения часовой стрелки. Тогда все базисы, обладающие этим свойством, являются правыми. Если при этом для базиса такой поворот виден по
ходу движения часовой стрелки, то он левый.
Рассмотрим, как вводится понятие ориентации пространства. Все рассуждения в случае пространства аналогичны соответствующим рассуждениям, проведенным для
базисов плоскости.
Формулы перехода от одного базиса пространства к другому выводятся так же, как
и в случае плоскости. Если координаты векторов e |
,e |
,e |
второго базиса относительно |
|||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
2 |
3 |
|
|
первого равны: e {a ;a |
2 |
;a },e {b ;b |
;b },e {c ;c |
2 |
;c |
}, |
то формулы перехода, |
|||||||
1 |
1 |
3 |
2 |
1 |
2 |
3 |
3 |
1 |
|
3 |
|
|
||
связывающие координаты одного и того же вектора a относительно этих базисов, имеют
следующий вид:
|
|
|
|
|
, |
|
1 a1 1 |
b1 2 |
c1 3 |
|
|||
|
|
b2 |
|
|
|
(5.10) |
2 a2 1 |
2 |
c2 1, |
||||
|
|
b3 |
|
|
|
|
3 a3 1 |
2 |
c3 3. |
|
|||
где { 1; 2; 3} - координаты вектора a относительно первого базиса, { 1 ; 2 ; 3 } - его координаты относительно второго. Матрица
a |
b |
c |
|
|
|
|
||
|
1 |
1 |
|
1 |
|
|
|
|
a2 |
b2 |
c2 |
, |
|
|
|
||
a |
3 |
b |
c |
3 |
|
|
|
|
|
3 |
|
|
|
|
|
||
столбцы уоторой совпадают с координатами векторов e |
,e |
,e |
относительно первого |
|||||
|
|
|
|
|
1 |
2 |
3 |
|
базиса, является матрицей перехода от первого базиса ко второму. Ее определитель всегда отличен от 0, так как векторы e1 ,e2 ,e3 линейно независимы. Если этот
7
определитель положителен, то базисы имеют одинаковую ориентацию, если отрицателен, то ориентации различны.
Для базисов пространства аналогично случаю плоскости вводится бинарное отношение
. Если B1 |
и B2 базисы пространства, |
то B1 B2 в том и только в |
том случае, когда |
|||||
|
B1 |
|
B2 |
|
0. |
Также доказывается, что - |
отношение эквивалентности, |
которое разбивает |
|
|
|
||||||
|
||||||||
|
|
|
|
|
|
|
|
|
множество всех базисов пространства на два класса эквивалентности. Пространство называется ориентированным, если для него задан один из классов эквивалентности.
Базисы, принадлежащие выбранному классу, называются правыми, а находящиеся во
втором классе - левыми.
Справедливо следующее правило, которое примем без доказательства. Отложим векторы e1,e2 ,e3 первого базиса от точки О, а векторы e1 ,e2 ,e3 второго базиса от точки
O . Базисы имеют одинаковую ориентацию, если кратчайшие повороты от вектора e1 к e2 из конца вектора e3 и от e1 к e2 из конца вектора e3 видны либо одновременно по ходу движения часовой стрелки, либо против движения. Если один из этих поворотов виден по ходу движения, а другой против, то базисы имеют различные ориентации.
Обычно пространство ориентируют с помощью такого базиса, для которого этот поворот виден против движения часовой стрелки.
Определение 4. Пусть дана упорядоченная пара неколлинеарных векторов a и b .
Под ориентированным углом между векторами a и b будем понимать величину
углаab, взятую со знаком “+”, если базис a b правый, и со знаком “-”, если этот базис левый. Если векторы a и b сонаправлены, то ориентированный угол равен 0; если a и b противоположно направлены, то этот угол равен .
Ориентированный угол между векторами a и b будем обозначать через ab. Итак,
ab , |
(5.11) |
|
|
|
|
причем 0 ab , если ориентация базиса a b положительна и |
ab 0, если она |
отрицательна. |
|
Отметим некоторые свойства ориентированных углов. |
|
8

Свойство 1. Если векторы a и b не противоположно направлены, то |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ab = - ba. |
|
|
|
(5.12) |
||
|
|
|
|
|
|
|
|
Доказательство. Если |
|
|
|
|
|
|
|
a b , то |
согласно определению |
1, ab |
= |
ba |
= 0 |
и |
|
соотношение (5.12) выполнено. |
|
|
|
|
|
|
|
Если a и b не коллинеарны, |
то они образуют базис плоскости. |
Базисы |
a, |
b |
и b , |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
имеют разные ориентации, поэтому модули ориентированных углов abи ba совпадают,
а их знаки различны. Свойство доказано.
Заметим, что в силу (5.11) соотношение (5.12) для противоположных векторов не
выполняется.
Свойство 2. Если a и b произвольные векторы, то
|
|
|
|
|
|
|
|
|
|
cos ab = cos ba . |
(5.13) |
|||
Справедливость равенства (7.3) непосредственно следует из свойства четности |
||||
функции у = соs х. |
|
|
|
|
Свойство 3. Для любых векторов a, b и c справедливы соотношения: |
||||
|
|
|
|
|
|
|
|
||
cos ab bc |
|
cos ac , |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.14) |
|
|
||||
|
|
|
|
|
sin ab bc |
sin ac . |
|||
|
|
|
|
|
|
|
|
|
|
В дальнейшем будем предполагать, что любой рассматриваемый базис - правый.
Теорема 3. Пусть координаты вектора в прямоугольном декартовом базисе i , j
имеют вид a{ 1; 2}. Тогда
|
1 |
|
|
|
a |
|
cos(ia), |
|
|
|
|
(5.15) |
||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
1 |
|
a |
|
sin(ia ). |
|
в виде: a 1i |
2 j. Так как i , j - |
|||||||||
Доказательство. Представим данный вектор a |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
прямоугольный декартовый правый базис, то |
i |
|
j |
|
1,ij |
. Скалярно умножив вектор |
||||||||||
|
2 |
|||||||||||||||
a на базисные вектора, получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ai ( 1i 2 j )i 1,aj ( 1i 2 j )j 2 . |
|
|||||||||||||||
9
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Но ai |
|
a |
|
cos(ia ), поэтому из (5.13) следует, что |
1 |
|
a |
|
cos(ia ). Аналогично, |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
a |
|
|
cos( ja ). Используем соотношения (5.14) и равенство |
ji |
: |
|
|
|
|||||||||
|
|
|
|
2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos ja |
|
cos ji ia |
|
cos ia |
|
|
sin ia |
. |
|||||||
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Отсюда следует: 2 a sin ia . Теорема доказана.
Выведем формулы, выражающие значения синуса и косинуса ориентированного угла между векторами через их координаты. Они позволят по координатам векторов определить значение ориентированного угла между ними. Так как ориентированный угол лежит на полуинтервале ( – ; ], то для его вычисления как раз необходимо знать значения двух тригонометрических функций.
Будем предполагать, что на плоскости выбран правый прямоугольный декартовый базис i , j . Рассмотрим векторы a{ 1; 2} и b{ 1; 2}. Из соотношений (5.15) следует,
что
|
1 |
|
2 |
|||||
|
|
|
|
|
|
|
|
|
cos(ia ) |
|
|
|
;sin(ia) |
|
|
|
, |
|
|
a |
|
|
|
|
a |
(5.16) |
|
|
|
|
|
|
|||
|
|
|
||||||
cos(ib ) |
|
1 |
|
;sin(ib ) |
|
|
2 |
. |
|
|
b |
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Воспользуемся соотношениями (5.14): sin ab |
sin ai |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
ib |
||||
. Так как |
ai |
ia, то |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin(ab ) sin(ib ia ) sin(ib )cos(ia ) cos(ib )sin(ia ).
Подставим в полученное выражение соотношения (5.16):
sin(ab ) 1 2 2 1 . a
 b
b
|
a |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
12 |
22 |
|
12 |
22 , 1 2 |
|
|
|
||||||||
Так как |
|
, |
b |
|
2 1 |
|
, то окончательно имеем: |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
10