

praktikum
.pdfФедоровА.Ф., БаженовД.А.«Системыуправления химико-технологическимипроцессами», лабораторныйпрактикум, 2009 г
Требования к содержанию отчета студента по лабораторной работе
Отчет должен содержать:
1.Формулировкуцелиисследований. Планпроведенияисследований.
2.Функциональную схему лабораторного стенда.
3.Краткое математическое описание двухпозиционной САР и изложение сути анализа и синтеза САР методом припасовывания.
4.Графики экспериментальной переходной функции и процессов регулирования для всех выполненных заданий.
5.Определение параметров динамической модели объекта регулирования.
6.Вычисления теоретических параметров установившихся автоколебаний регулируемой величины.
7.Определение на основе выполненных экспериментов численных значений параметров установившихся автоколебаний регулируемой величины.
8.Анализ результатов исследований, обобщения; выводы, рекомендации.
Контрольные вопросы
1.Какие САР называются нелинейными, релейными, двухпозиционными?
2.Как может описываться динамика промышленных объектов регулирования?
3.Что характеризует переходная функция объекта?
4.Что характеризует постоянная времени объекта?
5.Как интерпретировать понятие коэффициента передачи объекта?
6.Какие бывают разновидности статических характеристик релейных регуляторов?
7.Почему статическая характеристика регулятора называется двухпозиционной?
8.Каков характер установившегося режима двухпозиционной САР, какими параметрами он характеризуется?
9.На какие показатели установившихся автоколебаний регулируемой величины и как влияет инерционность объекта?
10.Как влияет на отклонение регулируемой переменной от заданной величина зоны неоднозначности?
Ответы на поставленные вопросы можно найти в литературных источниках [3, 4, 7].
38

ФедоровА.Ф., БаженовД.А.«Системыуправления химико-технологическимипроцессами», лабораторныйпрактикум, 2009 г
4. ИССЛЕДОВАНИЕ АВТОМАТИЧЕСКИХ СИСТЕМ РЕГУЛИРОВАНИЯ НА ЭВМ
4.1. Основы теории автоматического регулирования
Технологический процесс, при протекании которого производится максимальное или определенное количество продукта с заданными свойствами при минимальных затратах сырья или энергии, является оптимальным. Чтобы обеспечить оптимальные условия процесса, им надо управлять. В общем случае различают управляющие воздействия (x) – параметры, с помощью которых можно влиять на объект управления, и управляемые величины (y) – параметры, на которые влияют управ-
ляющие воздействия (рис. 4.1).
Рис. 4.1. Схема объекта управления
Для химических процессов под управлением понимают такое целенаправленное изменение управляющих воздействий, которое обеспечивает оптимальные условия проведения процесса.
Различают 3 вида управления:
1.Регулирование – разновидность управления, при котором цель достигается за счет стабилизации управляемых параметров (y = const).
2.Автоматическое программное управление – цель управления
достигается за счет изменения управляющих параметров по определенной программе [y = f (τ)].
3.Следящее управление – цель управления достигается за счет
поддержания управляемых параметров в малой окрестности других независимых параметров[y = f ( y1)].
4.1.1.Разновидности автоматических систем регулирования
Вобщем случае различают разомкнутую (см. рис. 4.2) и замкнутую (см. рис. 4.3) системы регулирования.
39
ФедоровА.Ф., БаженовД.А.«Системыуправления химико-технологическимипроцессами», лабораторныйпрактикум, 2009 г
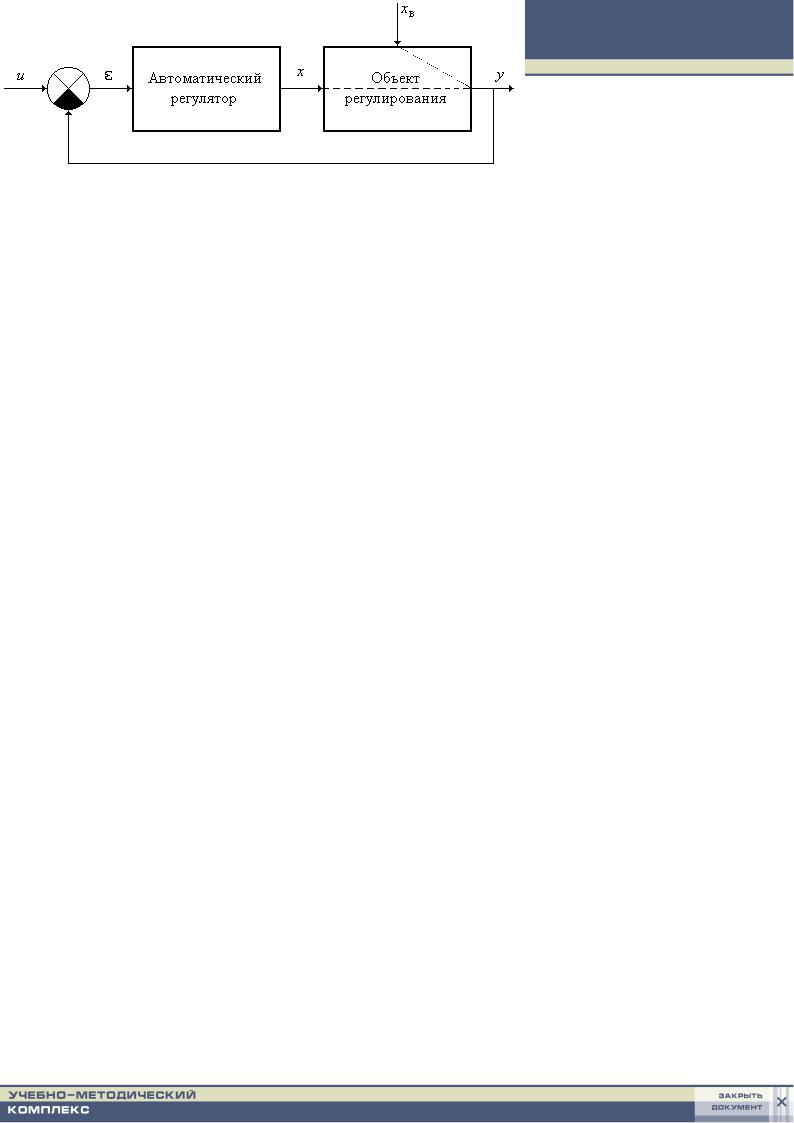
Рис. 4.2. Схема разомкнутой системы регулирования
Система регулирования должна обеспечивать условия, когда ошибка рассогласования (ε = u – y) не превышает заданного значения, которое определяется технологией и свойствами продукта.
Разомкнутая система регулирования обладает рядом недостатков:
–автоматический регулятор не получает информацию о результатах работы;
–для обеспечения регулирования необходимо заранее известные свойства объекта заложить в регулятор.
В химическом производстве свойства объекта постоянно меняются и заложить их в автоматический регулятор нельзя, поэтому в химической промышленности разомкнутые системы регулирования не применяются.
В замкнутых системах регулирования используются регулирование по отклонению и регулирование по возмущению.
Регулирование по отклонению. Системы регулирования по отклонению (рис. 4.3) имеют обратную связь, с помощью которой передается информация о выходных параметрах на элемент сравнения. Элемент
сравнения формирует сигнал рассогласования (ε = u – y), который поступает в автоматический регулятор. Таким образом, при регулировании по отклонению информация на регулятор поступает в виде отклонения.
Рис. 4.3. Схема замкнутой системы регулирования по отклонению
Регулирование по возмущению. Регулирование по возмущению используется в случае, когда на ход технологического процесса оказывают влияние внешние воздействия, которые изменяются произвольно и независимо от технологического процесса. Для упреждения влияния возмущающего параметра на объект строится система регулирования
40
ФедоровА.Ф., БаженовД.А.«Системыуправления химико-технологическимипроцессами», лабораторныйпрактикум, 2009 г
(рис. 4.4), в которой величина возмущающего сигнала сравнивается с номинальным значением, и ошибка рассогласования подается на регулятор. Однако данная система не лишена недостатков:
–отсутствует информация о результатах воздействия;
–необходимо строить столько систем регулирования, сколько существует возмущений.
Рис. 4.4. Схемаупреждения влияния возмущающего параметра на объект
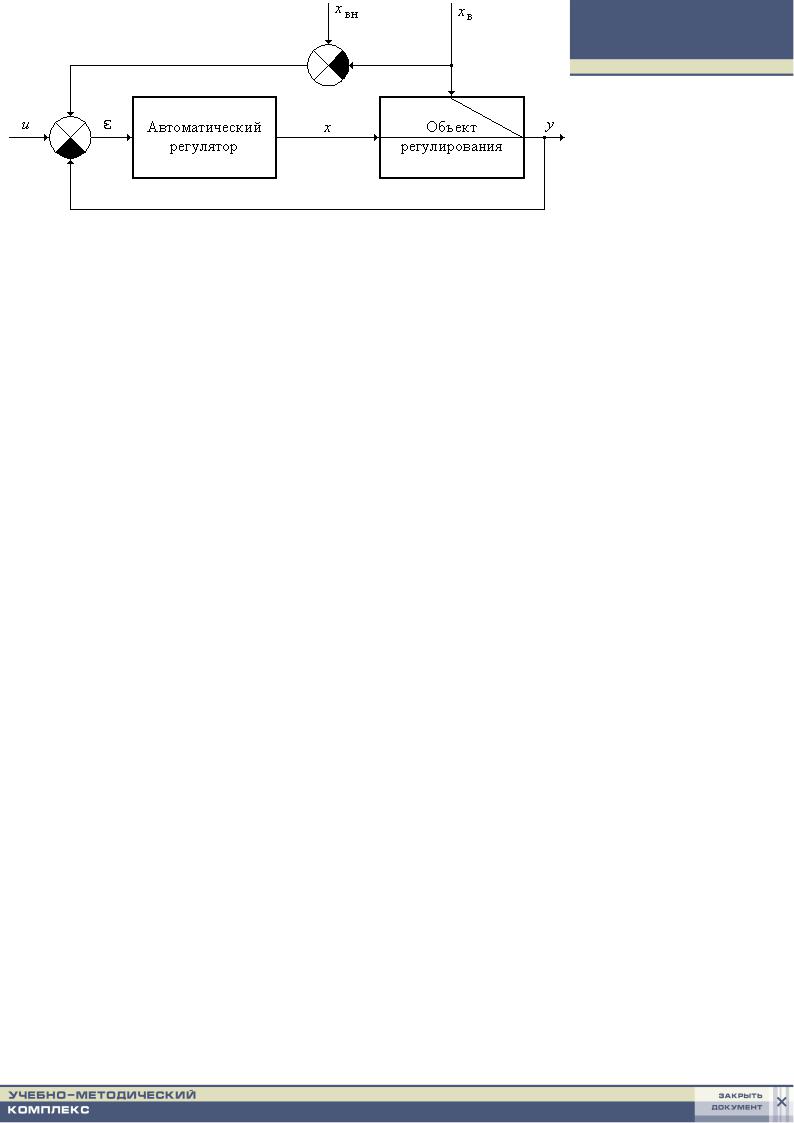
Для исключения этих недостатков строят комбинированные системы регулирования (рис. 4.5), в которых используются одновременно принципы регулирования по отклонению и возмущению.
Рис. 4.5. Схема комбинированной системы регулирования
В теории АСР для исследования систем приняты типовые воздейст-
вия:
1)единичное импульсное воздействие x(τ) = 1′(τ);
2)единичное ступенчатое воздействие x(τ) = 1(τ);
3)периодическое воздействие x = Aвхei(ωτ+ϕвх).
41
ФедоровА.Ф., БаженовД.А.«Системыуправления химико-технологическимипроцессами», лабораторныйпрактикум, 2009 г
Реакция системы на единичное импульсное воздействие называется импульсной переходной или весовой функцией ϖ(τ). Реакция системы на единичное ступенчатое воздействие называется временной характеристикой h(τ). В случае периодического входного сигнала на выходе формиру-
ются колебания выходного сигнала y = Aвых ei(ωτ+ϕвых).
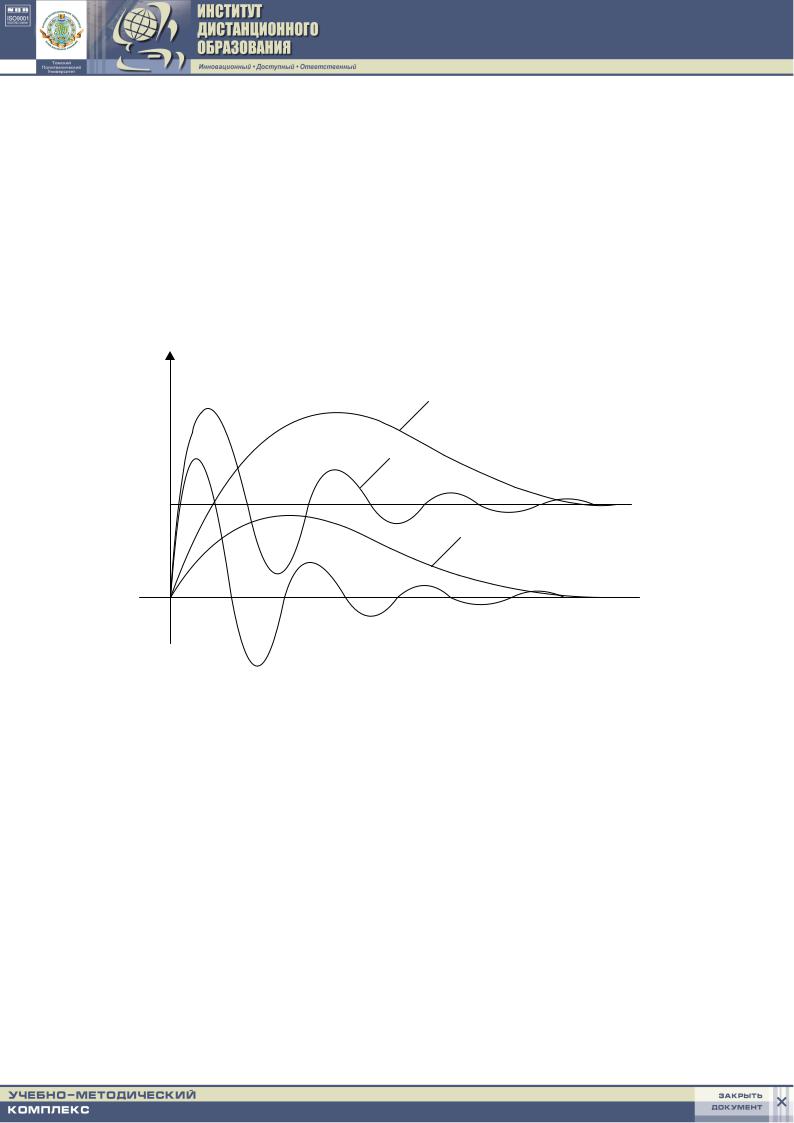
Изменение выходного сигнала от момента приложения входного сигнала до установления стационарного состояния называется переходным процессом. Различают два вида переходных процессов: колебательный и апериодический (рис. 4.6) Для обеспечения работоспособности системы необходимо обеспечить качество переходных процессов.
h(τ)
1
2
1
3
 τ
τ
 4
4
Рис. 4.6. Типовые переходные процессы в АСР:
1 – апериодический по каналу управления; 2 – колебательный по каналу управления; 3 – апериодический по каналу возмущения; 4 – колебательный по каналу возмущения
4.1.2.Качество переходных процессов
Вобщем случае можно сформулировать две задачи управления:
1.Если на вход системы (рис. 4.7) подан управляющий сигнал (хв = 0, u ≠ 0) – канал управления, то система должна воспроизвести его с максимально возможной точностью, определяемой динамическими свойствами системы.
2.Если на вход системы (рис. 4.7) подано возмущение (хв ≠ 0, u = 0) – канал возмущения, то система должна как можно быстрее и с наимень-
42
ФедоровА.Ф., БаженовД.А.«Системыуправления химико-технологическимипроцессами», лабораторныйпрактикум, 2009 г
шими потерями ликвидировать последствия этого возмущения, т. е. вернуться в исходное стационарное состояние.
Рис. 4.7. Схема одноконтурной АСР
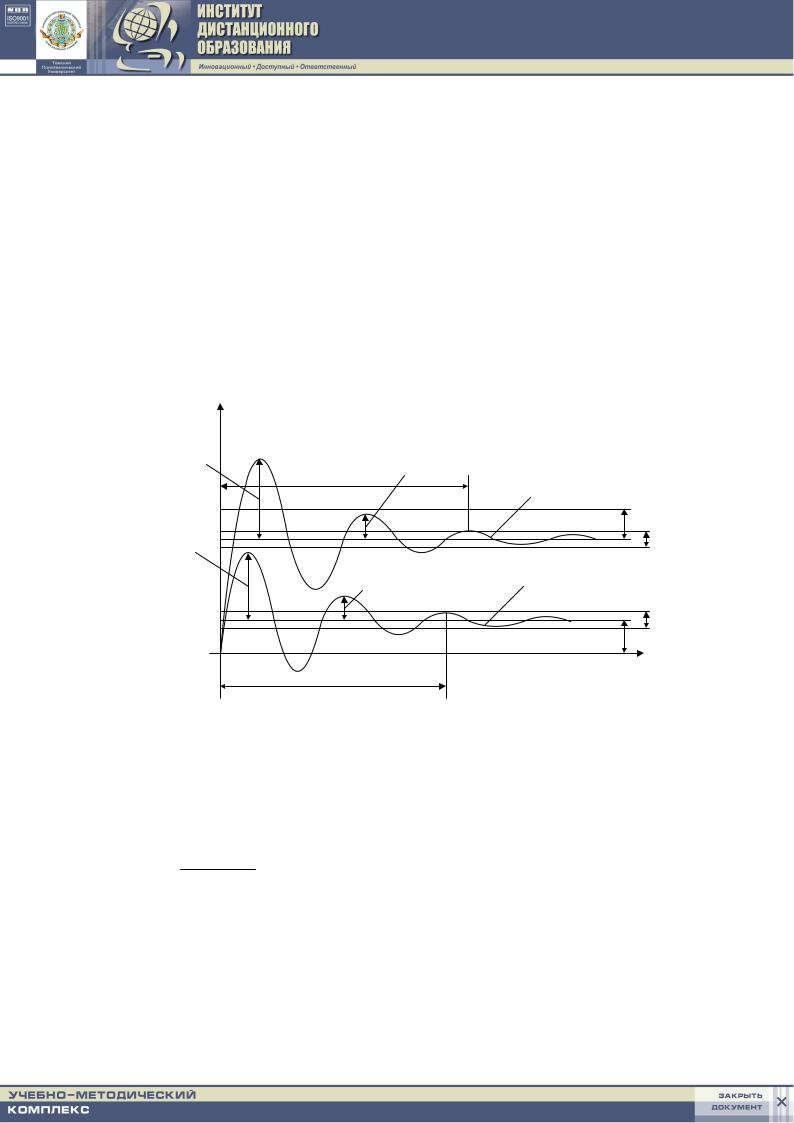
Абсолютное число систем относится к классу колебательных, поэтому переходныепроцессывсистемеимеютвид, представленныйнарис. 4.8.
h(τ) |
|
|
Адин |
τр |
А2 |
1 |
|
1 |
|
ст |
|
|
|
|
Адин |
|
2Δ |
|
|
|
|
А2 |
2 |
|
|
2Δ |
|
|
ст |
|
|
τ |
τр
Рис. 4.8. Колебательные переходные процессы в АСР:
1 – переходный процесс по каналу управления;
2 – переходный процесс по каналу возмущения
Переходные процессы характеризуются параметрами: Адин – динамическая ошибка;
ψ = Aдин − А2 – степень затухания переходного процесса. Опти-
Адин
мальная степень затухания находится в интервале 0,75÷0,9; τр – время регулирования. Переходный процесс считается закончен-
ным, если 1 – y(τ) ≤ , где – заранее заданная величина; ст – статическая ошибка.
43

ФедоровА.Ф., БаженовД.А.«Системыуправления химико-технологическимипроцессами», лабораторныйпрактикум, 2009 г
Статическая |
ошибка характерна |
для статических систем: |
lim h(τ)≠1 – для канала управления и lim h (τ)≠ 0 – для канала возму- |
||
τ→∞ |
τ→∞ |
в |
щения); если lim h(τ)=1 – для канала управления и lim h (τ)= 0 – для |
||
τ→∞ |
|
τ→∞ в |
канала возмущения, то система называется астатической.
Для оценки качества переходного процесса необходимо, чтобы параметры переходных процессов были оптимальными:
Адин → min;
ψ → ψзад;
τр → min; ст → min.
4.2. Лабораторная работа №8 Исследование звена второго порядка
Цель работы
Цель работы заключается в следующем:
1.Ознакомиться с методикой исследования звена второго порядка.
2.Получить практические навыки исследования звена второго порядка с помощью ЭВМ.
Звено второго порядка
Звено второго порядка описывается уравнением
T 2 |
d 2 y |
+T |
dy |
+ y = kx , |
(4.1) |
|
|
||||
2 dτ2 |
1 dτ |
|
|
||
где Т1 и Т2 – постоянные времени.
Статическая характеристика звена второго порядка y0 = Kx0 .
Применим к уравнению (4.1) операцию прямого преобразования Лапласа:
T 2 p2 y(p)+T py(p)+ y(p)= kx(p); |
|
|
2 |
1 |
(4.2) |
[T 2 p2 |
+T p +1]y(p)= kx(p). |
|
2 |
1 |
|
Решение в операторной форме может быть записано в виде
|
|
k |
|
|
y(p)= |
|
|
x(p). |
(4.3) |
T 2 p2 |
+T p +1 |
|||
2 |
1 |
|
|
|
Передаточная функция определяется выражением
44
ФедоровА.Ф., БаженовД.А.«Системыуправления химико-технологическимипроцессами», лабораторныйпрактикум, 2009 г
W (p)= |
y(p) |
|
= |
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.4) |
|||||||||||
x(p) |
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
2 p2 +T p +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Используя операцию обратного преобразования Лапласа, выразим |
|||||||||||||||||||||||||||||||||||||||||||||||
временную характеристику из уравнения (4.4): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|||||||||||
h(τ)= L−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
L−1 |
|
|
|
|
|
|
|
. (4.5) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T 2 |
|
|
|
|
T1 |
|
|
|
|
||||||||||||||||||||
T 2 p |
2 +T p +1 p |
|
|
|
|
|
|
|
|
|
2 |
|
|
1 p |
|||||||||||||||||||||||||||||||||
2 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
p |
|
+ |
|
|
p + |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T 2 |
T 2 |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|||||
Запишем характеристическое уравнение: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
p2 + |
T1 |
|
p + |
1 |
= 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
(4.6) |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
T |
2 |
|
|
|
|
|
|
T |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Выразим корни характеристического уравнения: |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
p |
= − |
|
T |
|
± |
|
|
|
T 2 |
|
− |
|
1 |
. |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
T |
2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
1,2 |
|
|
|
|
|
|
2T 2 |
|
|
|
|
|
4T 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
В зависимости от вида корней уравнение (4.5) меняет свои свойства. |
|||||||||||||||||||||||||||||||||||||||||||||||
Рассмотрим различные случаи решения уравнения (4.5). |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
Корни уравнения (4.6) действительные разные |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
2 |
|
|
|
|
|
|
T1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
T1 |
|
> |
|
4 и |
|
> 2 , то корни уравнения (4.6) действи- |
|||||||||||||||||||||||||||||||||||||||||
В случае если T |
|
|
|
T |
|||||||||||||||||||||||||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
T |
2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
тельные разные, так как |
|
1 |
|
|
|
− |
|
|
|
|
|
|
> 0 . В общем случае получаем корни |
||||||||||||||||||||||||||||||||||
4T |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
4 |
|
|
T 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уравнения: p1 = −α1 и p2 = −α2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Используя теорему Безу, запишем уравнение (4.5) в виде |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
h(τ)= |
k |
|
−1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
L |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
(4.7) |
||||||||||||||||||||||||||||
T |
2 |
|
(p − p1)(p − p2 ) |
|
p |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для решения уравнения (4.7) воспользуемся теоремой разложения |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
h(τ)= |
|
B(0) |
|
|
|
∑ |
|
|
B(p j ) |
|
|
|
p |
τ |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
j |
|
|
. |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
A(0) |
|
|
p j A (p j ) |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
В рассматриваемом случае |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
В(рj) = 1; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.8) |
|||||||||
А(рj) = (p – p1)(p – p2) = p2 – (p1 + p2) p + p1p2; |
|||||||||||||||||||||||||||||||||||||||||||||||
А′(р) = 2р – р1 – р2;
45
ФедоровА.Ф., БаженовД.А.«Системыуправления химико-технологическимипроцессами», лабораторныйпрактикум, 2009 г
А′(р1) = 2р1 – р1 – р2 = р1 – р2; А′(р2) = 2р2 – р1 – р2 = р2 – р1.
Учитывая (4.8), запишем выражение для временной характеристики:
h(τ)= |
|
|
k |
|
|
|
|
1 |
|
|
+ |
|
|
|
|
1 |
|
|
|
|
|
e p1τ + |
|
|
|
|
|
1 |
|
|
|
|
|
e p2τ |
|
. |
(4.9) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
T |
2 |
|
|
p p |
|
|
|
p |
|
(p |
|
− p |
|
) |
|
p |
|
(p |
|
− p |
|
) |
|||||||||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Из уравнения (4.6) распишем выражение для произведения р1р2: |
|||||||||||||||||||||||||||||||||||||||||||||||
p p = |
|
− |
|
T |
|
|
+ |
|
|
T 2 |
|
− |
|
1 |
|
− |
T |
− |
|
T 2 |
|
− |
1 |
|
|
= |
|
|
|
|
|||||||||||||||||
|
1 |
|
|
|
|
1 |
|
T |
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
1 2 |
|
|
|
|
2T 2 |
|
|
|
4T 4 |
|
2 |
|
|
|
2T 2 |
|
|
|
4T |
4 |
T |
2 |
|
|
|
|
|
|
(4.10) |
||||||||||||||||||
T 2 |
|
|
|
|
|
|
|
2 |
|
T 2 |
|
|
2 |
|
|
|
2 |
|
|
|
2 |
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
||||||||||||
− |
|
T |
|
|
|
|
− |
1 |
+ |
T |
|
|
|
T 2 |
− |
|
1 |
|
− |
T 2 |
|
+ |
1 |
= |
1 |
||||||||||||||||||||||
= |
1 |
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
1 |
T 2 |
1 |
|
|
T 2 |
T |
2. |
|||||||||||||||||||||
4T 4 |
|
|
|
2T 2 |
|
|
4T |
4 |
|
|
T 2 |
|
|
2T |
2 |
|
|
4T 4 |
|
|
|
|
4T |
4 |
|
|
|
|
|
|
|||||||||||||||||
|
2 |
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
2 |
|
|
2 |
|
|
|
2 |
|
|
2 |
|
|
|
|
|
2 |
|
|
2 |
||||||
Подставляя выражение (4.10) в уравнение (4.9), запишем общий случай решения уравнения (4.5) для случая простых корней:
h(τ)= k |
1 |
+ |
|
p2 |
|
|
|
e p1τ + |
|
|
p1 |
|
|
e p2 |
τ . |
(4.11) |
(p |
− p |
|
) |
(p |
|
− p |
) |
|||||||||
|
|
|
2 |
|
2 |
|
|
|
||||||||
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
||
Для рассматриваемого случая корни уравнения должны быть разные (не должно быть кратных и нулевых корней). Подставим в решение (4.11) вещественные корни р1 = –α1 и р2 = –α2:
h(τ)= k |
1 |
+ |
|
|
|
− α2 |
|
|
e−α1τ + |
|
|
|
− α1 |
|
|
e−α2 |
τ |
= |
|
|||||||||||||||||
|
− α + α |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
− α |
2 |
+ α |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
(4.12) |
||||||
= k 1 |
|
|
|
α2 |
|
|
|
e−α1τ |
|
|
|
α1 |
|
|
e−α2τ |
. |
|
|
|
|
|
|
||||||||||||||
− |
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
α |
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
2 |
− α |
|
|
|
|
|
|
|
|
2 |
− α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Графическая |
|
|
интерпретация |
|
уравнения |
(4.12) |
|
представлена на |
||||||||||||||||||||||||||||
рис. 4.9, кривая 1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Запишем выражение для передаточной функции: |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
W (p)= |
|
|
|
|
|
|
k |
|
|
|
|
|
= |
|
|
k |
|
|
|
1 |
|
|
|
|
. |
||||||||||
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
(p − p |
|
)(p − p |
|
|
) |
||||||||||||
|
|
|
|
|
|
|
|
T |
p |
+T p +1 |
|
T |
|
|
2 |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||
46

ФедоровА.Ф., БаженовД.А.«Системыуправления химико-технологическимипроцессами», лабораторныйпрактикум, 2009 г
Рис. 4.9. Временные характеристики для случаев, когда T1 ≥ 2 :
T2
1 – корни действительные разные, |
T1 |
> 2 ; 2 – корни кратные, |
T1 |
= 2 |
|
T |
|
T |
|
|
2 |
|
2 |
|
Учитывая, что р1 = –α1 |
и |
|
р2 = –α2, |
выражение |
для передаточной |
||||||
функции примет вид W (p)= |
k |
|
|
1 |
|
|
1 |
|
, т. е. |
звено представляет |
|
T |
2 |
|
|
p +α p +α |
2 |
||||||
|
|
|
|
|
|||||||
|
|
1 |
|
|
|
|
|
||||
|
2 |
|
|
|
|
|
|
|
|
|
|
собой последовательное соединение двух апериодических звеньев (см. рис. 4.10), поэтому оно не относится к элементарным типовым звеньям и его можно описать системой из двух дифференциальных уравнений.
Рис. 4.10. Структурная схема передаточной функции для случая, когда корни действительные разные
Уравнение (4.6) имеет кратные корни
|
Уравнение (4.6) имеет кратные корни |
p |
= p |
2 |
= − |
Т1 |
= −α, когда |
|||||
|
|
|||||||||||
|
|
|
|
|
|
1 |
|
|
2Т22 |
|
||
T 2 |
|
|
|
|
|
|
|
|
|
|
||
|
1 |
|
T |
|
|
|
|
|
|
|
||
1 |
− |
|
= 0 , и, следовательно, |
1 |
= 2 . Передаточная функция определя- |
|||||||
4T 4 |
T 2 |
|||||||||||
|
|
T2 |
|
|
|
|
|
|
|
|||
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
ется выражением
47