

Міністерство освіти і науки України
Одеський державний інститут вимірювальної техніки
Білоцерківська філія
Загальна фізика
Методичні вказівки до практичної роботи
.Механіка. Кінематика точки
для спеціальностей: 5.05100103 «Механічні вимірювання»
5.05100102 (Електротеплотехнічні вимірювання»
Методичні вказівки розглянуті та рекомендовані у навчальний процес
цикловою комісією БЦфОДІВТ
Протокол №____ ____________ 200__р.
Голова цилової комісії ________ Т.В.Христюк
Біла Церква – 2010 рік
Практична робота №1
Тема: Механіка. Кінематика точки.
Мета: Перевірити засвоєння знань студентами з теми «Механіка. Кінематика точки». Набути вміння розв’язувати задачі з механіки на рух матеріальної точки та аналізувати одержані результати.
Теоретичні відомості
Механіка – це наука про механічний рух, механічні взаємодії і рівновагу тіл. Механічним рухом називають зміну взаємних положень тіл у просторі з плином часу. За підходом до вивчення механічних рухів механіка поділяється на кінематику, динаміку і статику. У кінематиці розглядають геометричний аспект руху незалежно від причин, які зумовили цей рух. У динаміці вивчають механічні взаємодії тіл, які спричиняють зміну руху або приводять до зміни механічного стану тіл. У статиці розглядають умови рівноваги тіл. Одна з основних задач механіки полягає у визначенні положення тіла і його щвидкості в будь-який момент часу за відомими початковими умовами.
Кінематика – вивчає геометричні властивості механічного руху тіл, встановлює зв’язок між просторовими характеристиками руху і часом без урахування взаємодій між тілами. Усі тіла навколо нас рухаються або перебувають у стані відносного спокою. Ми не помічаємо руху Землі і звикли вважати поверхню Землі нерухомою, а тіла, які переміщаються по цій поверхні – рухомими. Проте тіло, яке нерухомо лежить на поверхні Землі, обертається навколо осі земної кулі і рухається по орбіті навколо Сонця.У природі не існує абсолютного руху, ні абсолютного спокою – неможливо вибрати одне «зручне» тіло відносно якого можна було б розглядати всі рухи. Можна лише умовно прийняти яке-небудь тіло за нерухоме і розглядати рух чи стан спокою інших тіл відносно нього. Тіло або система тіл, відносно яких визначають положення інших тіл називають тілом відліку. Положення тіла у просторі визначають як відстань від тіла відліку. Простір і час основні поняття фізики. Простір виражаєвідокремленість об’єктів і їхню протяжність. Час характеризує послідовність існування явищ і відокремленість різних стадій розвитку, тривалість, періодичність та швидкість процесів. Простір і час – абсолютні, незалежні від матеріальних об’єктів. Основним об’єктом кінематики є матеріальна точка. Матеріальною точкою називається макроскопічне тіло, розмірами якого в даній задачі можна знехтувати і вважати, що вся маса тіла зосереджена в одній геометричній точці. Конкретне тіло в одних задачах можна вважати матеріальною точкою в інших таке спрощення неприпустиме.
Для
описання руху, а також будь-яких фізичних
явищ, що відбуваються, необхідна система
відліку, яка поєднує просторову систему
відліку і спосіб відліку часу. У такій
системі відліку кожну подію можна
характеризувати місцем, де вона відбулась
і часом коли вона відбулась. У класичній
механіці для описання руху користуються
часом, єдиним для всієї системи відліку.
Для характеристики простору, в якому
відбувається рух матеріальної точки,
з тілом відліку зв’язують
просторову систему координат. Просторова
система координат
– це три лінійно незалежні н
Рис. 1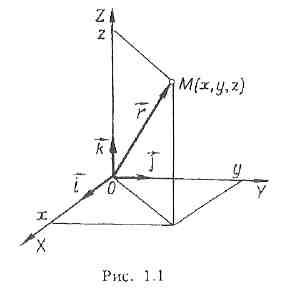 апрямлені
відрізки прямих (координатні осі), які
виходять з однієї точки (початок відліку)
Рух матеріальної точки буде описано
повністю, якщо буде відомо її положення
у
апрямлені
відрізки прямих (координатні осі), які
виходять з однієї точки (початок відліку)
Рух матеріальної точки буде описано
повністю, якщо буде відомо її положення
у
![]() ,
проведеним від початку координат О до
цієї точки (рис.1). Проекції радіуса-вектора
на координатні осі OX,
OY,
OZ
дорівнюють координатам x,
y,
z
точки М:
,
проведеним від початку координат О до
цієї точки (рис.1). Проекції радіуса-вектора
на координатні осі OX,
OY,
OZ
дорівнюють координатам x,
y,
z
точки М:
![]() ,
,
де
![]() -
одиничні вектори (орти), які задають
масштаб довжини і напрями координатних
осей. Отже, положення точки М задається
трьома числамиx,
y,
z:
М=М(x,y,z).
У процесі руху матеріальної точки її
координати змінюються з часом. Рух буде
визначено, якщо відома функціональна
залежність координат точки від часу t:
-
одиничні вектори (орти), які задають
масштаб довжини і напрями координатних
осей. Отже, положення точки М задається
трьома числамиx,
y,
z:
М=М(x,y,z).
У процесі руху матеріальної точки її
координати змінюються з часом. Рух буде
визначено, якщо відома функціональна
залежність координат точки від часу t:
x=x(t), y=y(t), z=z(t) (1)
або якщо буде знайдена одна векторна функція:
![]() (2)
(2)
Векторне рівняння (2) еквівалентне системі трьох скалярних рівнянь (1). Рівняння (1), або (2) називають кінематичними рівняннями руху точки. Лінія, яку описує матеріальна точка під час руху, називається траєкторією. За формою траєкторії рухи поділяються на прямолінійні і криволінійні. Форма траєкторії залежить від вибору системи відліку. Відстань між двома заданими точками, відрахована вздовж траєкторії називається шляхом. Шлях – скалярна величина. Пройдений матеріальною точкою шлях залежить від часу і може лише збільшуватися у процесі руху незалежно від його напрямку.
Рис. 2 озглянемо
рух матеріальної точки по довільній
траєкторії. Нехай у момент часуt
матеріальна точка перебуває в положенні
М1,
яке визначається радіус-вектором
озглянемо
рух матеріальної точки по довільній
траєкторії. Нехай у момент часуt
матеріальна точка перебуває в положенні
М1,
яке визначається радіус-вектором
![]() (рис.
2) і протягом наступного проміжку часу
∆t
проходить шлях
∆S,
перемістившись у радіус-вектор якого
положення М2,
радіус-вектор
якого
(рис.
2) і протягом наступного проміжку часу
∆t
проходить шлях
∆S,
перемістившись у радіус-вектор якого
положення М2,
радіус-вектор
якого
![]() .
Вектор Δ
.
Вектор Δ![]() ,
проведений із початкового положення
матеріальної точки за проміжок часу
Δt.
Його можна виразити через зміну
радіуса-вектора точки:
,
проведений із початкового положення
матеріальної точки за проміжок часу
Δt.
Його можна виразити через зміну
радіуса-вектора точки:
Δ![]() (3)
(3)
або через відповідні зміни її координат:
Δ![]() Δ
Δ![]() +Δ
+Δ![]() +Δ
+Δ![]() ,
(4)
,
(4)
де Δx=x2-x1, Δy=y2 –y1, Δz=z2-z1. Вектор переміщення є функцією часу.
Модуль
вектора переміщення |Δ![]() |
між
двома точками траєкторії в загальному
випадку не збігається з довжиною дуги
траєкторії між цими точками (шляхом
∆S).
Лише при нескінченно малому переміщенні
модуль |
|
між
двома точками траєкторії в загальному
випадку не збігається з довжиною дуги
траєкторії між цими точками (шляхом
∆S).
Лише при нескінченно малому переміщенні
модуль |![]() |=dS
і в разі прямолінійного руху в одному
напрямі |Δ
|=dS
і в разі прямолінійного руху в одному
напрямі |Δ![]() |=ΔS.
|=ΔS.
Швидкістю
називається
вектор
![]() ,
який дорівнює похідній від радіус-вектора
матеріальної точки за часом і напрямлений
по дотичній до траєкторії у напрямі
руху. Швидкість є функцією часу.
,
який дорівнює похідній від радіус-вектора
матеріальної точки за часом і напрямлений
по дотичній до траєкторії у напрямі
руху. Швидкість є функцією часу.
![]() (5)
(5)
У
декартових координатах вектор![]() можна
виразити через проекції на координатні
осі:
можна
виразити через проекції на координатні
осі:
![]() =vx
=vx
![]() +vy
+vy
![]() +vz
+vz
![]() ,
де
,
де
vx
=![]() ;
vy=
;
vy=![]() ;
vz=
;
vz=![]() (6)
(6)
За правилом векторної алгебри модуль вектора швидкості:
![]() (7)
(7)
Якщо відома залежність пройденого шляху від часу, то модуль швидкості дорівнює похідній від шляху за часом:
![]()
![]() (8)
(8)
Скалярною середньою швидкістю називають відношення пройденого тілом шляху до часу проходження:
![]()
![]() (9)
(9)
У
загальному випадку матеріальна точка
рухається нерівномірно, а отже її
швидкість змінюється за модулем і
напрямком. Такий рух називають змінним
і характеризують прискоренням.
Прискоренням
називають вектор
![]() ,
який дорівнює першій похідній від
вектора швидкості або другій похідній
від вектора переміщення за часом:
,
який дорівнює першій похідній від
вектора швидкості або другій похідній
від вектора переміщення за часом:
![]() (10)
(10)
У проекціях на координатні осі вектор прискорення:
![]() (11)
(11)
Прискорення
має дві складові: тангенціальне (дотичне)
і нормальне (доцентрове прискорення).
Повне прискорення дорівнює векторній
сумі:![]()
![]() (12)
(12)
Тангенціальне прискорення характеризує зміну вектора швидкості за модулем. Вектор тангенціального прискорення напрямлений до траєкторії у даній точці і чисельно дорівнює проекції вектора повного прискорення на напрям вектора швидкості:
![]() (13)
(13)
Модуль нормального прискорення:
![]() ,
(14)
,
(14)
де R – радіус кривизни траєкторії. Нормальне прискорення характеризує зміну вектора швидкості за напрямом. Вектор нормального прискорення напрямлений вздовж радіуса кривизни траєкторії до миттєвого центра кривизни. Модуль вектора прискорення визначають за формулою:
![]() (15)
(15)
Рівнозмінним називають рух, при якому за будь-які рівні проміжки часу швидкість змінюється на однакову величину. Основні рівняння кінематики для рівнозмінного руху у скалярній формі мають вигляд:
![]()
![]()
![]() (16)
(16)
Рух
матеріальної точки по колу навколо
нерухомої осі. Нехай матеріальна точка
М рухається по колу радіуса R.
Початок О прямокутної системи координат
XYZ
розмістимо на осі обертання
![]() і
спрямуємо вісьOZ
вздовж цієї осі (рис.). Тоді площина кола
буде паралельна координатній площині
XOY
і
положення точки М у просторі визначатиметься
радіус-вектором:
і
спрямуємо вісьOZ
вздовж цієї осі (рис.). Тоді площина кола
буде паралельна координатній площині
XOY
і
положення точки М у просторі визначатиметься
радіус-вектором:
![]() (17)
(17)
Переміщення
точки по колу протягом часу t
характеризують кутом
![]() повороту вектору
повороту вектору![]() ,
проведеного із центра коло О1
до
точки М, тобто
,
проведеного із центра коло О1
до
точки М, тобто
![]() дорівнює радіусу кола. Кут
дорівнює радіусу кола. Кут![]() відраховують від площиниXOZ
і називають кутовим
переміщенням.
Швидкість
відраховують від площиниXOZ
і називають кутовим
переміщенням.
Швидкість
![]() ,
з якою матеріальна точка рухається по
колу, називаютьлінійною.
Для кінематичного описання обертального
руху кутове переміщення матеріальної
точки за скінченний малий проміжок часу
,
з якою матеріальна точка рухається по
колу, називаютьлінійною.
Для кінематичного описання обертального
руху кутове переміщення матеріальної
точки за скінченний малий проміжок часу
![]() зображують
у вигляді вектора малого кута повороту
зображують
у вигляді вектора малого кута повороту![]() .
Модуль цього вектора дорівнює кутовому
переміщенню за даний проміжок часу
.
Модуль цього вектора дорівнює кутовому
переміщенню за даний проміжок часу![]() .
Рух точки по колу характеризують вектором
кутової швидкості
.
Рух точки по колу характеризують вектором
кутової швидкості![]() .Кутовою
швидкістю
називають вектор, що дорівнює похідній
від вектора кута повороту за часом:
.Кутовою
швидкістю
називають вектор, що дорівнює похідній
від вектора кута повороту за часом:
![]() (18)
(18)
Зв’язок
між кутовою швидкістю
![]() і лінійною швидкістю
і лінійною швидкістю![]() матеріальної
точки:
матеріальної
точки:
![]() (19)
(19)
При обертанні по колу нормальне прискорення можна виразити через кутову швидкість:
![]() ,
(20)
,
(20)
або
у векторній формі:
![]() ,
,
де
знак мінус показує, що вектори
![]() і
і![]() мають
протилежні напрями.
мають
протилежні напрями.
Періодом обертання називають проміжок часу Т, протягом якого матеріальна точка здійснює один оберт:
![]() (21)
(21)
Частота обертання дорівнює числу обертів за одиницю часу:
![]() або
або
![]() (22)
(22)
Кутовим
прискоренням
називають вектор
![]() ,
який дорівнює першій похідній від
вектора кута повороту за часом:
,
який дорівнює першій похідній від
вектора кута повороту за часом:
![]() (23)
(23)
Вектор
![]() за
напрямом збігається з вектором
за
напрямом збігається з вектором![]() ,
якщо швидкість обертання збільшується,
а при сповільненому обертанні напрями
цих векторів протилежні. Співвідношення
між кутовим прискоренням
,
якщо швидкість обертання збільшується,
а при сповільненому обертанні напрями
цих векторів протилежні. Співвідношення
між кутовим прискоренням![]() та
тангенціальним
та
тангенціальним![]() :
:
![]() (24)
(24)
Основні рівняння кінематики обертального руху:
![]()
![]() (25)
(25)
де
t0
– початковий
момент часу; при рівноприскореному
обертанні
![]() >0,
а при рівносповільненому
>0,
а при рівносповільненому
![]() <0.
Кутове прискорення в СІ вимірюється в
рад./с2
<0.
Кутове прискорення в СІ вимірюється в
рад./с2