

ГОУВПО
Воронежский государственный технический университет
Факультет ____________________
Кафедра робототехнических систем
КУРСОВАЯ РАБОТА
По дисциплине " Теория автоматического управления "
Тема: Синтез линейных САУ
Расчетно-пояснительная записка
Разраб. студента
Группа инициалы, фамилия
Руководитель _____________ ___________________
подпись инициалы, фамилия
Члены комиссии ______________ ___________________
подпись инициалы, фамилия
______________ ___________________
подпись инициалы, фамилия
Нормоконтролер ______________ ___________________
подпись инициалы, фамилия
Защищен ______________ Оценка___________
Дата
2011 Г.
Воронежский государственный технический университет
Кафедра робототехнических систем
ЗАДАНИЕ
На курсовую работу по дисциплине
"Теория автоматического управления"
Тема работы:
Студент группы:
Номер варианта:
Технические условия:
Содержание и объем работы:
Сроки выполнения этапов:
Срок защиты курсовой работы:
Руководитель _______________________
Дата, инициалы и фамилия
Задание принял студент _______________________
Дата, инициалы и фамилия
Замечания руководителя
Содержание.
1. Исходные данные.
1.1. Электромеханическая система управления руки робота.
1.2. Расчетные формулы для определения параметров передаточной
функции двигателя.
2. Дифференциальные уравнения электромеханической системы.
2.1. Классическая форма записи уравнений.
2.2. Уравнения состояний системы управления и двигателя.
3. Структурная схема электромеханической следящей системы.
3.1. Блок-схема электромеханической следящей системы.
3.2. Структурная схема САР скорости с развернутой структурной схемой
двигателя.
3.3. Структурная схема электромеханической следящей системы с
свернутой структурной схемой двигателя.
3.4. Передаточные функции САР скорости по управлению в tf- форме и
разомкнутой и замкнутой электромеханической следящей системы.
4. Анализ электромеханической следящей системы.
4.1. Анализ устойчивости.
4.2. Анализ показателей качества по переходным характеристикам САР
скорости и следящей системы.
4.3. Анализ точности САР скорости и следящей системы.
5. Коррекция электромеханической следящей системы.
5.1. Коррекция САР скорости методом корневого годографа.
5.2. Коррекция следящей системы с П-регулятором.
6. Анализ чувствительности и точности САР скорости.
7. Коррекция электромеханической следящей системы в пространстве
состояний.
7.1. Структурная схема и матрично-векторное описание системы с доступом
к переменным состояний.
7.2. Структурная схема и матрично-векторное описание системы с
модальным регулятором.
7.3. Переходная характеристика исходной и скорректированной с
модальным регулятором систем.
8. Реализация цифрового модального регулятора.
8.1. Параметры блоков в цифровой форме.
8.2 Переходная характеристика системы.
9. Исследование электромеханической системы с наблюдателем.
Заключение.
Библиографический список.
I. Исходные данные
1.1. Электромеханическая система управления руки робота
На рис. 1 представлена схема электромеханической системы управления руки робота, в таблице 1 - параметры двигателя, в таблице 2 – параметры элементов системы, в таблице 3 – параметры качества регулирования системы
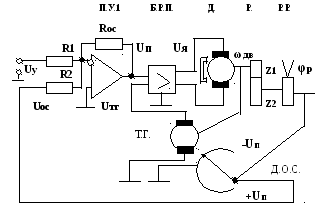
Рис.1
Рис. 1. Схема электромеханической системы управления поворота руки робота:
П.У.1 – предварительный усилитель;
Б.Р.П. – блок регулируемого электропривода (предварительный усилитель ПУ2 и усилитель мощности);
Д. – двигатель постоянного тока;
Р. – редуктор;
Р.Р. – рука робота;
Д.О.С. – датчик обратной связи (датчик угла поворота);
Т.Г. – тахогенератор (датчик скорости);
Uу – напряжение задания угла поворота руки [ В];
Uп – напряжение с выхода предварительного усилителя [В];
Uя – напряжение в якорной цепи двигателя [В];
![]() –угловая
скорость вращения вала двигателя
[рад./с.];
–угловая
скорость вращения вала двигателя
[рад./с.];
![]() –угол
поворота руки [рад.];
–угол
поворота руки [рад.];
+ Uп, -Uп – напряжение питания датчика обратной связи [В];
Uос – напряжение датчика обратной связи [В].
Uтг – напряжение тахогенератора. [В].
Таблица 1
Параметры двигателя
|
Вариант
|
Мощность, P, кВт
|
Напряжение, U, В
|
Частота вращения, n ,об/мин
|
КПД µ, %
|
Rя, Ом
|
Lя , мГн
|
J, кг*м2
|
|
24 |
0,5 |
220 |
1000 |
66 |
7,05 |
231 |
0,012 |
Таблица 2 Параметры элементов системы
|
Вариант |
Коэффициент передачи П.У.1 П.У.2
|
Коэффициент передачи усилителя (БРП)
|
Постоянная времени Усилителя (Б.Р.П)
|
Коэффициент Передачи тахогенератора
|
Коэффициент передачи редуктора
|
Коэффициент передачи Д.О.С.
|
|
24 |
Кпу1, Кпу2 |
Ку
|
Ту
|
Ктг
|
Кр
|
Кдос
|
|
2,2 |
10 |
0,04 |
0,0046 |
0,01 |
1 |
Таблица 3 Параметры качества регулирования системы
|
Вариант
|
Вид переходной характеристики САР |
Вид переходной Характеристики СС
|
Перерегулирование σ, %
|
Допустимое отклонение, ∆ |
|
24 |
колебательная
|
Апериодическая
|
4 |
0.04 |