

1. Лекция 1.1. Пространство R3 (1 с.) +
.pdf1
ЛЕКЦИЯ 1.1
Трёхмерное евклидово пространство
Понятие вектора. Считаем, что имеется интуитивное понимание размерности обычного пространства. Примером двумерного пространства – плоскости,
является учебная доска. |
A, B точек обычного трёхмерного про- |
Под упорядоченной парой |
странства (или плоскости) будем понимать такую пару точек, для которой указано, какая точка является первой, а какая второй.
|
При таком соглашении по определению полагают, что вектор – это на- |
правленный отрезок AB , соединяющий между собой элементы упорядоченной |
|
пары |
A, B точек пространства. Обозначаются векторы либо двумя боль- |
|
|
шими |
латинскими буквами со стрелкой вверху, например AB , либо одной ма- |
|
|
лой латинской буквой со стрелкой вверху, например a (рисунок 1. а). Точка A |
|
|
|
называется началом вектора AB , а точка B – концом вектора AB . |
|
Если соединить начальные точки векторов отрезком прямой линии и пере- |
|
двигать один из них вдоль этого отрезка с сохранением его направления до совпадения начальных точек обоих векторов, будем говорить о параллельном переносе этого вектора. Два вектора считаются равными, если они могут быть полностью совмещены как направленные отрезки путём параллельного переноса.
|
|
|
|
|
|
|
Так, на рисунке 1. а векторы AB и A' B' очевидно равны. |
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
Длиной |
AB |
|
|
|
вектора AB называется длина определяющего его направ- |
|
|
|
|
|
|
|
|
ленного отрезка AB . Величина вектора по определению равна его длине, взятой со знаком «плюс», если его направление совпадает с выбранным направлением оси, на которую он помещён, и со знаком «минус» – в противном случае.
Для векторов определяются две операции – умножение вектора на число
|
|
|
|
(обозначается a |
или AB , где R ) и сложение векторов (обозначает- |
||
|
|
|
|
ся a |
b |
или AB CD ). |
|
При умножении вектора на некоторое число R его длина умножается на абсолютную величину этого числа, направление при 0 не изменяется,
а при 0 изменяется на противоположное. На рисунке 1. б вектор AC есть

2
результат умножения вектора AB на некоторое число 0, что записывается
|
|
|
|
|
|
|
так: |
AC AB . |
|
|
|
|
|
|
Сложение двух векторов осуществляется по известному из школьного курса |
|||||
|
|
|
|
|
|
|
правилу параллелограмма. Например, вектор AD c на рисунке 1. в является |
||||||
|
|
|
|
|
|
|
суммой векторов AB a и |
AC b . Кроме этого, легко видеть, что так как |
|||||
|
|
|
|
|
|
|
AC BD , сложение векторов может производиться по правилу треугольника: |
||||||
|
|
|
|
|
|
|
начало вектора |
b путём параллельного переноса совмещаем с концом вектора |
|||
|
|
|
|
|
a , получаем вектор c |
AD , который и является суммой векторов a и b . |
|||
Отметим, что операция сложения векторов является алгебраической, так как она каждым двум векторам трёхмерного пространства (плоскости) ставит в соответствие третий вектор того же пространства (плоскости). Кроме этого, операция сложения векторов коммутативна
|
|
|
|
|
|
|
AD |
AB AC AC AB , |
|
|
|||
ассоциативна |
|
|
|
|
|
|
|
|
|
|
|
|
|
AB BD |
DC AB BD DC |
|||||
|
|
|
|
|
|
|
(рисунок 1. в), и имеет обратную операцию, которая называется вычитанием
|
|
|
|
|
векторов (рисунок 1. в): вектор d |
a |
b |
– это разность векторов a и b . |
|
В отличие от операции сложения |
векторов операция умножения векто- |
|||
ра на число является внешней бинарной операцией, так как определена для пары, один элемент которой принадлежит множеству векторов пространства
|
|
|
C |
B |
C |
|
B |
B' |
|
||
|
B |
|
|
||
|
|
|
|
|
|
A |
A' |
A |
A |
|
D |
|
а |
|
б |
|
в |
|
|
|
|
||
|
|
|
Рис. 1.1. |
|
|
Декартова система координат. Координаты точек и векторов. Ортого-
нальной декартовой системой координат в пространстве (на плоскости) назы-
вается совокупность трёх (двух) пересекающихся, взаимно перпендикулярных осей и точки их пересечения – начала координат. Напомним известное из средней школы построение декартовой системы координат для случая плоскости.
Проводим на плоскости две взаимно перпендикулярные прямые и обозначаем точку их пересечения буквой O (рисунок 1.2). На горизонтальной и верти-

3
кальной прямых откладываем отрезки OE1 и OE2 одной и той же длины. Упорядочим тройку точек O; E1; E2 так, чтобы кратчайший поворот отрезка OE1 до совмещения с отрезком OE2 осуществлялся против часовой стрелки – это направление принимаем за положительное.
Прямую, проходящую через точки O и E1 , назовём осью OX 1 , а прямую,
проходящую через точки O и E2 назовём осью OX 2 . На каждой оси поместим действительные числа, отмечая их положение пропорционально величине соот-
ветствующего числа: число 0 поместим в точку O , число 1 в точки E1 и |
E2 , |
|||||
и так далее. |
|
|
|
|
|
|
X 2 |
|
|
P |
|
|
|
|
|
|
|
|
|
|
E1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
E1 |
X 1 |
|
|
|
|
|
Рис. 1.2. |
|
|
|
|
Теперь каждой упорядоченной паре чисел |
x1; x2 R2 |
ставится |
во |
|||
взаимно однозначное соответствие точка плоскости, в проекции которой на оси OX k находится число xk k 1, 2 . Таким образом, между точками плоскости и парами действительных чисел – их координатами x1 на оси OX 1 и x2 на оси OX 2 , установлено биективное соответствие, то есть плоскость является прямым произведением R R R2 . По этой причине плоскость называется про-
странством R2 (читается “пространством эр два”). Поясним, что речь идёт о модели плоскости, но слово модель обычно опускают.
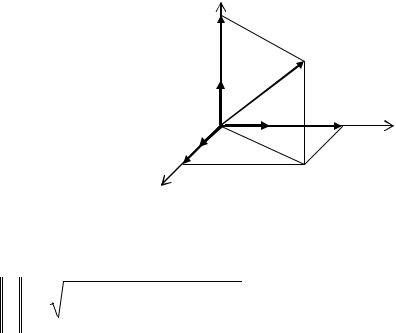
Если ортогональная декартова система координат введена в трёхмерном пространстве, то точке P ставятся в соответствие три действительных числа –
декартовы координаты, которые по определению равны величинам коорди-
натных проекций OA, OB и OC радиус-вектора OP точки P , началом ко-
торого является начало системы координат, а концом – точка P . На рисунке 1.3
величины x1, x2 , x3 – это координаты точки P и её радиус-вектора OP . Нача-
лу системы координат O ставится в соответствие нуль-вектор – направленный отрезок с совпадающими начальной и конечной точками и, следовательно,
имеющий нулевую длину. Для нуль-вектора направление не определено.
|
4 |
|
X 3 |
C |
|
|
|
P |
|
3 |
|
O |
|
B |
|
|
|
A |
2 |
X 2 |
|
1 |
|
X 1 |
Рис. 1.3. |
|
Применяя теорему Пифагора, нетрудно показать, что длина или норма ра-
диус-вектора x в трёхмерном пространстве вычисляется по формуле
def |
x1 2 x2 2 x3 2 . |
|
x |
(1.1) |
В случае плоскости в формуле отсутствует третья координата.
|
|
|
|
|
|
|
|
1, 2 , 3 , которые |
Направление вектора x определяется тремя углами |
||||||||
этот вектор образует с положительными полуосями координат OX 1 , OX 2 , |
||||||||
OX 3 , причём 0 |
i |
i 1, 2, 3 , или направляющими косинусами: |
||||||
|
|
|
|
|
|
|
|
|
cos |
|
|
|
xi |
i 1, 2, 3 . |
|
||
i |
|
|
|
|||||
|
|
|
|
|
|
|
||
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
Нетрудно видеть, что обычное трёхмерное пространство является произве-
дением R R R R3 . Как и в случае плоскости, речь идёт, вообще говоря, о
модели трёхмерного пространства.
Представление радиус-вектора в виде разложения по базисным векто-
рам. Рассмотрим случай радиус-векторов, причём для простоты и наглядности ограничимся случаем векторов на плоскости. Сначала рассмотрим представление радиус-вектора через его координаты.
На рисунке 1.4 представлен радиус-вектор x в декартовой системе коорди-
|
|
|
|
|
|
нат X 1OX 2 . Векторы OA и OB – это составляющие вектора x по осям коор- |
|||||
динат. Очевидно, что в соответствие с правилом параллелограмма |
|||||
|
|
|
|
|
|
x |
OA OB . |
|
|
|
|
|
|
|
|
|
|
Векторы |
e1 и |
e 2 , расположенные на осях OX 1 |
и OX 2 соответственно, |
||
направленные в положительных направлениях осей и имеющие единичную дли-

5
ну, составляют канонический базис декартовой системы координат (глубокий смысл этого важнейшего понятия будет выяснен в ближайшее время).
X 2
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
y |
|
|
|
|
|
|
|
||
e 2 |
|
|
|
|
|
O |
|
|
A |
X |
1 |
|
|
|
|||
|
e1 |
|
|
||
|
|
|
|
Рис. 1.4.
Обозначим длины составляющих вектора x по соответствующей оси
|
|
|
|
|
|
|
|
||||
x1 OA , x2 |
OB , |
||||
|
|
|
|
|
|
где фигурная скобка означает величину вектора. Тогда очевидно, что
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 e1 |
|
|
|
|
x2 e 2 . |
||||
OA OA e1 |
, OB OB e |
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Теперь вектор x с учётом правила параллелограмма представляется в виде следующей суммы:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 e1 x2 |
e 2 . |
|
|||||
x OA OB OA e1 |
OB e |
2 |
(1.2) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Формула (1.2) |
является важнейшей для дальнейшего изложения и называется |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, e 2 |
|
|
разложением вектора x по базисным векторам e1 |
. |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Переходя к случаю трёхмерного пространства, можем по аналогии с разложением (1.2) написать следующее равенство:
xOA OB OC
|
|
|
|
|
|
|
|
|
|
|
OA e1 |
OB e |
2 |
OC e |
3 |
||||||
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
x2 |
|
x3 |
|
e1 |
e 2 |
e 3 . (1.3) |
6
В качестве иллюстрации этого равенства можно обратиться к рисунку 1.3, на ко-
|
|
|
|
|
|
|
|
, e 2 |
, e 3 |
|
|
тором векторы базиса e1 |
указаны, но не подписаны. |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Величины составляющих радиус-вектора x по осям системы координат |
||||
|
|
|
|
|
|
OA и OB в равенстве (1.2) и OA, OB и OC в равенстве (1.3) совпадают, очевидно, с координатами конечной точки вектора и называются также координа-
тами радиус-вектора x .
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, e 2 |
, e |
|
В силу того, что векторы e1 |
3 являются обычными векторами |
|||||||
|
|
|
|
|
|
|
|
|
пространства R3 , из равенства (1.3) вытекают следующие разложения: |
||||||||
|
|
|
|
|
|
|
|
|
e1 |
q1 e1 q2 |
e 2 q3 |
e 3 , |
|
|
|
||
|
1 |
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
e 2 |
q1 |
e1 q2 |
e 2 |
q3 |
e 3 , |
|
|
(1.4) |
|
2 |
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
e 3 |
q1 |
e1 q2 |
e 2 |
q3 |
e 3 . |
|
|
|
|
3 |
3 |
|
3 |
|
|
|
|
Очевидно, что для координат этих векторов справедливы равенства:
q1 |
1, q2 |
0, q3 |
0 ; |
|
|
1 |
|
1 |
1 |
|
|
q1 |
0 |
, q2 |
1, q3 |
0 ; |
(1.5) |
2 |
|
2 |
2 |
|
|
q1 |
0 |
, q2 |
0, q3 |
1. |
|
3 |
|
3 |
3 |
|
|
Аналогичные равенства справедливы, естественно, и для пространства R2 . Кро- |
|||||
ме этого, нуль-вектор имеет, очевидно, нулевые координаты: |
|
||||
|
|
|
|
|
|
0 |
0 e1 |
0 e 2 0 e 3 . |
(1.6) |
||
Выражение операций над векторами через их координаты. Сначала вы-
ясним, как связаны координаты равных векторов. Для этого снова обратимся к
рисунку 1.4. На нём изображены равные векторы x и y , которые в соответствии с данным выше определением равенства векторов, совмещены как направленные
отрезки. Их составляющие по осям OX 1 и OX 2 очевидно также совпадают как
направленные отрезки. Следовательно, если x y , то
xOA
y1 |
|
|
|
y2 . |
|
|
(1.7) |
||||
, x2 OB |
|||||
|
|
|
|
|
|

7
Аналогичные (1.7) равенства справедливы, конечно, и в случае трёхмерного про-
|
|
|
|
странства, а именно, если x |
y , то |
|
|
x1 y1, x2 |
y2 , x3 |
y3 . |
(1.7’) |
Итак, если векторы равны, то и их координаты относительно декартовой системы координат также равны.
Справедливо очевидно и обратное, а именно: если координаты двух век-
торов относительно некоторой фиксированной системы координат равны,
то они равны в том смысле, что их можно полностью совместить как направленные отрезки путём параллельного переноса.
Рассмотрим теперь операцию сложения радиус-векторов по правилу параллелограмма для случая плоскости, которая представлена на рисунке 1.5. Вводя
обозначения для координат векторов x , y и z , записывая для векторов разло-
|
|
жения вида (1.2) и учитывая, что вектор z |
есть результат сложения векторов x и |
y по правилу параллелограмма, получаем:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e1 x2 e |
|
e1 y2 |
e |
|
||||||
z x y x1 |
2 |
y1 |
2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
||
|
x1 y1 e1 |
y2 |
e 2 |
z1 e1 |
z2 |
e 2 . |
|
|||||||
Учитывая равенства (1.7), получаем
z1 x1 y1, z2 |
x2 |
y2 . |
|
|
|
(1.8) |
|
X 2 |
|
|
|
|
|
|
G |
E |
|
C |
|
|
|
|
|
|
|
|
|
|
|
||
B |
|
|
|
|
|
|
|
|
|
z |
x |
y |
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
e 2 |
|
|
|
|
D |
|
|
O |
|
|
|
A |
F |
|
X 1 |
|
|
|
|||||
|
e1 |
Рис. 1.5. |
|
|
|
||
|
|
|
|
|
|||
Таким образом, при сложении радиус-векторов их координаты относительно канонического базиса складываются.

8
Конечно, аналогичный результат для суммы векторов справедлив с учётом (1.3), (1.7’) и в пространстве R3 :
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e1 x2 e 2 x3 |
e |
e1 y2 e 2 y3 |
e |
|
||||||
z x y x1 |
3 |
y1 |
3 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 y1 e1 |
x2 y2 e 2 |
x3 y3 e 3 |
z1 e1 |
z2 |
e 2 |
z3 |
e 3 , |
|
|
|
|
|
|
(1.9) |
|
z1 x1 y1, |
z2 x2 y2 , |
z3 x3 y3 . |
|
|
|
|
(1.10) |
Таким образом, при сложении векторов их соответствующие коорди-
наты относительно канонического базиса декартовой системы координат складываются.
Рассмотрим умножение вектора на число (рисунок 1.6), начиная снова для простоты со случая пространства R2 . Рассмотрим только координату вектора по оси OX 1 . Из подобия треугольников OCD и OAB , а также из того, что длины
|
|
|
|
|
|
|
|
z1 x1, z2 |
x2 . |
векторов x и z |
пропорциональны, следует что |
|
|
||||||
Поэтому, получаем, что |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
z z1 e1 |
z2 e 2 |
|
e1 x2 |
e 2 |
x1 e1 x2 e 2 . (1.11) |
||||
x x1 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
Аналогичное равенство имеет место и в случае пространства R3 :
|
|
|
|
|
|
|
|
|
|
|
|
z |
z1 e1 |
z2 e 2 |
z3 e 3 |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e1 x2 |
e 2 x3 |
e |
|
e1 x |
2 e 2 x3 e 3 . |
|
||||
|
x1 |
3 x1 |
(1.12) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
x |
|
|
|
|
|
z1 |
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
x |
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
x1 |
|
|
z1 |
X |
1 |
|
|
|
|
|
|
|
Рис. 1.6. |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
Из равенств (1.11) и (1.12) следует, что |
|
|
|
|
|||||||
z1 x1, |
z2 x2 , z3 x3 . |
|
|
|
|
|
(1.13) |
||||
9
Итак, при умножении вектора на число все его координаты относи-
тельно канонического базиса декартовой системы координат умножаются на это число.
|
|
|
|
|
|
, e |
|
, e |
|
Установим важное свойство системы векторов e1 |
2 |
3 (рассматри- |
||
|
|
|
|
|
ваем сразу пространство R3 ). Умножая каждый из векторов на соответствующий множитель 1, 2 , 3 , складывая получившиеся векторы и приравнивая результат к нулевому вектору, получаем:
|
|
|
|
|
|
1 e1 2 |
e 2 |
3 e 3 |
|
0 . |
(1.14) |
Учитывая (1.6), видим, что |
|
|
|
||
1 0, 2 0, 3 0 . |
|
(1.14’) |
|||
Векторная величина в левой части (1.13) называется линейной комбинацией
|
|
|
|
|
|
|
, e |
|
, e |
, 3 . Равенства |
|
векторов системы e1 |
2 |
3 с коэффициентами 1, 2 |
|||
|
|
|
|
|
|
(1.14’) означают, что линейная комбинация векторов канонического базиса имеет своим значением нулевой вектор только при их выполнении. Это свойство относится ко всей системе векторов канонического базиса и называется линейной независимостью системы. Свойство системы векторов быть линейно независимой выполняется не только для векторов канонического базиса, но и для бесконечного числа систем трёх некомпланарных (в случае плоскости – для бесконечного числа систем неколлинеарных) векторов.