

РГР14
.docx
ФЕДЕРАЛЬНОЕ
АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ (ФГБОУ ВПО ИрГУПС)»
Кафедра: «Управление техническими системами»
Расчетно-графическая работа
по дисциплине
«Гидро- и пневмоприводы автоматического оборудования»
Выполнил: Проверил:
студент гр. МР-10-1 доцент каф. УТС
Чехин П.Н. Ковыршин С.В.
___________________ ___________________
«__» _________ 2013 г. «____» ________ 2013 г.
Иркутск 2013
Техническое задание
Тележка приводится в движение с помощью транспортирующего пневмоцилиндра. Цилиндр должен иметь рабочий ход 1.5 м и развивать усилие не менее 500 Н.
В системе предусмотреть главный включатель, аварийный стоп и одиночный режим работы. В левой позиции кран опускает на тележку груз, затем тележка движется вправо. В крайнем правом положении остановка, задержка на 5 с, кран поднимает груз до концевого выключателя, задержка на 2 с, затем тележка движется влево.
Задача заключается в разработке проекта соответствующей системы управления. Требования к системе представим в виде таблицы 1.
Диаграмма шаг-перемещение
Таблица 1
|
Место оператора |
Необходимые элементы управления |
|
|
Необходимые режимы работы |
Одиночный цикл |
|
|
Сигнализирующие устройства |
Сигнальные лампы включения одиночного цикла и аварийного останова |
|
|
Исполнительные механизмы |
Число приводов |
3 |
|
Функции приводов |
|
|
|
Необходимое усилие |
500 Н для 1А |
|
|
Необходимый ход |
1500 мм для 1А |
|
|
Скорость, развиваемая приводом |
Скорость цилиндров не регулируется |
|
|
Торможение |
Не регулируется |
|
|
Расположение в пространстве |
1А – горизонтально 2А – вертикально 3А – вертикально |
|
|
Доп.функции |
Демпфирование в конечных положениях |
|
|
Исходное положение |
1А в крайнем правом положении 2А в верхнем положении 3А в верхнем положении |
|
|
Последовательность перемещений |
Порядок перемещения |
2А+ 2А-1А+ 3А+ 3А- 1А- |
|
Число шагов в рабочем цикле |
6 |
|
|
Условия выполнения шага |
Кнопка, сигналы от датчиков положения, реле задержки по переднему фронту |
|
|
Необходимое время ожидания |
После 1А+ 5 с, после 3А- 2 с |
|
|
Необходимое время цикла |
– |
|
|
Связь с другими системами управления |
– |
|
|
Датчики/сигналы |
Необходимые датчики положения |
Контроль конечных положений цилиндров 1А, 2А и 3А |
|
Необходимые датчики и реле давления |
– |
|
|
Другие входные и выходные сигналы |
– |
|
|
Окружающие условия |
Пространство для установки |
Не оговаривается |
|
Поведение при потере питания |
Все цилиндры должны остановиться и оставаться в текущем положении |
|
|
Поведение при аварийной остановке |
Все цилиндры должны остановиться и оставаться в текущем положении |
|
|
При прочих неисправностях |
Так же, как при аварийной остановке |
|
|
Окружающие условия |
Установка эксплуатируется при комнатной температуре, защита от влаги и пыли не требуется |
|
|
Необходимые меры защиты |
Главный включатель устанавливается в запирательный шкаф |
|
|
Другие требования |
– |
Пневматическая схема заданной автоматической системы
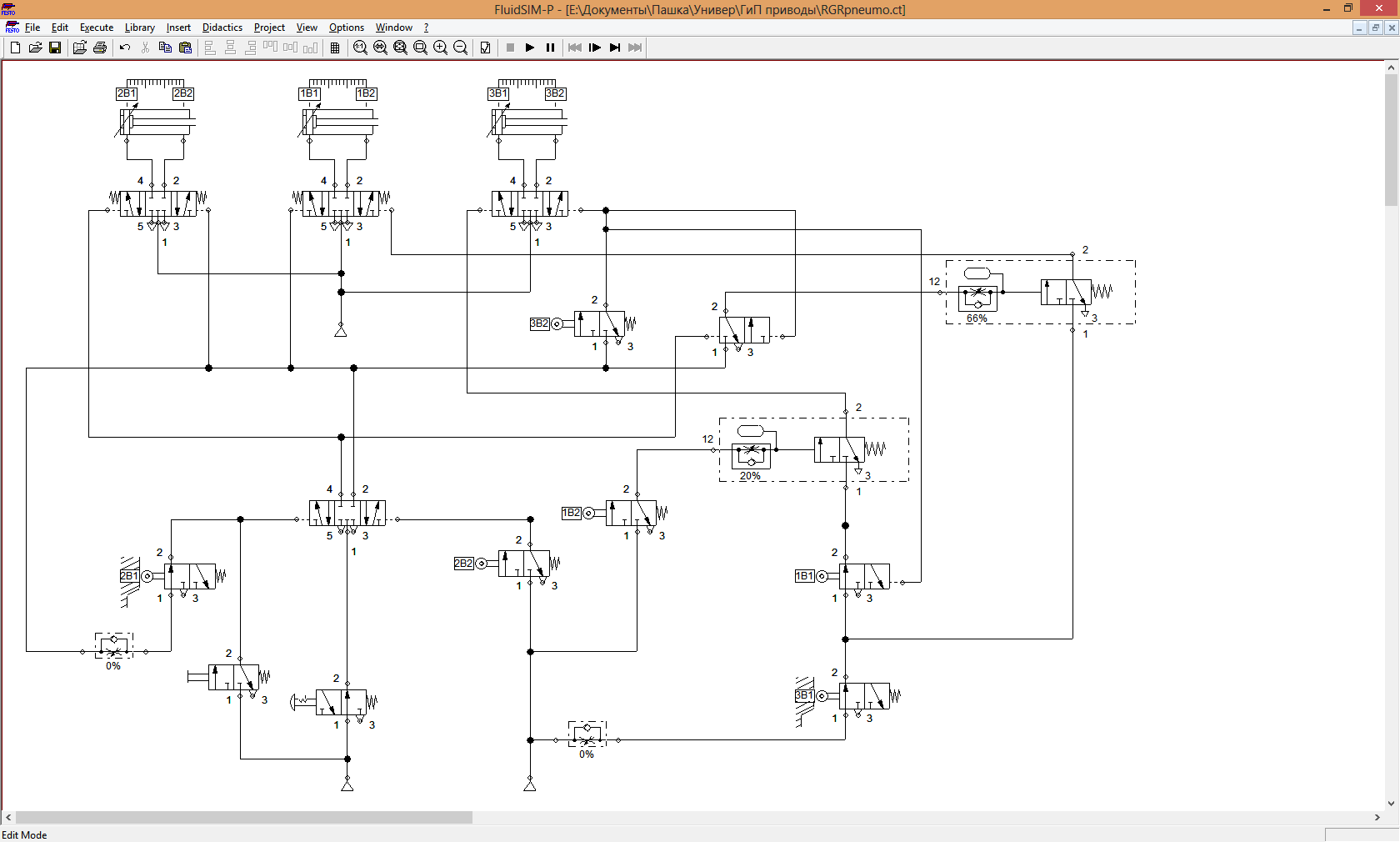
Пошаговое описание работы
Шаг 1 начинается с нажатия кнопки S1. Главный распределитель 1S0 переключается в левое положение, задействуя распределитель 2S0 и 2S1, который в свою очередь переключается в левое положение и шток цилиндра 2А опускает груз в тележку.
Когда сработает концевик 2B2, начинается шаг 2: главный распределитель 1S0 переключается в правое положение, активируется распределитель 2S1, шток цилиндра 2А поднимается.
Шаг 3: концевик 2B1 переключает распределитель 1S1 и шток цилиндра 1А начинает движение. Когда сработает концевик 1B2, активируется реле задержки Т1.
Шаг 4: через 5 секунд включается распределитель 3S1, который активирует движение штока цилиндра 3А. Шток опускается.
Шаг 5: Когда срабатывает концевик 3B2, шток цилиндра 3А поднимает груз.
Шаг 6: когда срабатывает концевик 3B1, распределитель 2S0 переключается и срабатывает реле задержки Т2. Через 2 секунды распределитель 1S1 переключается в правое положение и шток цилиндра 1А втягивается, возвращая тележку в исходное положение. После срабатывания концевика 1B1 система возвращается в начальное состояние. Новый цикл можно начать, опять нажав кнопку S1.
Пневмоэлектрическая схема
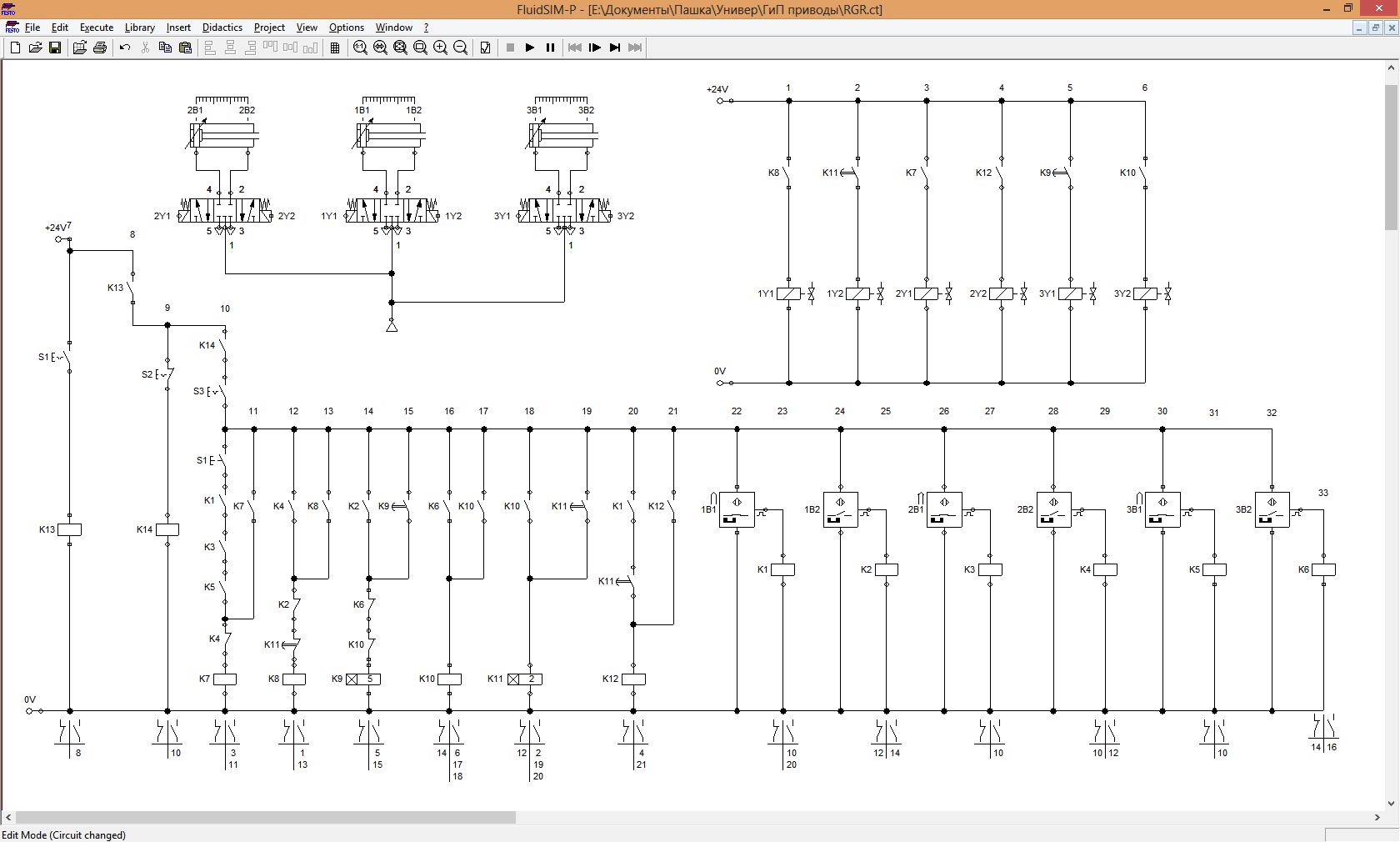
Пошаговое описание работы
В исходном положении цилиндры 1А, 2А, 3А находятся в задвинутом положении, активированы датчики 1B1, 2B1, 3B1.
Шаг 1 начинается тогда, когда нажата кнопка S1. Включается реле К7, встает на самоподхват и активирует соленоид 2Y1. Соленоид переключает распределитель 2V1 и шток цилиндра 2А опускает груз на тележку.
Шаг 2 начинается тогда, когда шток 2А достигнет крайнего положения и сработает датчик 2B2. Ключ К4 замыкается, активируется реле К8. Включается соленоид 1Y1, распределитель 1V1 запускает в ход шток цилиндра 1А.
Шаг 3 начинается при выполнении следующих условий: как только шток 1А достигнет крайнего положения, срабатывает датчик 1В2, который активирует реле К2. Ключ К2 замыкается, включается реле К9 с задержкой в 5 секунд. Ключ К9 замыкается, включается соленоид 3Y1. Распределитель 3V1 переключается, шток цилиндра 3А опускается.
Шаг 4 начинается тогда, когда шток 3А опустится и сработает датчик 3В2. Включается реле К6, ключ К6 замыкается и включается реле К10. Ключ К10 активирует соленоид 3Y2 и распределитель 3V1 переключается. Шток цилиндра 3А поднимает груз.
Шаг 5 начнется после того, как сработает реле К11 с задержкой в 2 секунды. Ключ К11 активирует соленоид 1Y2 и распределитель 1V1 переключается. Шток цилиндра 1А возвращает тележку.
Шаг 6 начинается, когда тележка вернется и сработает датчик 1В1. Ключ К1 включает реле К12. Ключ К12 активирует соленоид 2Y2, распределитель 2V1 переключается и шток цилиндра 2А поднимается в исходное положение. Система готова к новому циклу.
Пневмоэлектрическая схема с использованием логического модуля
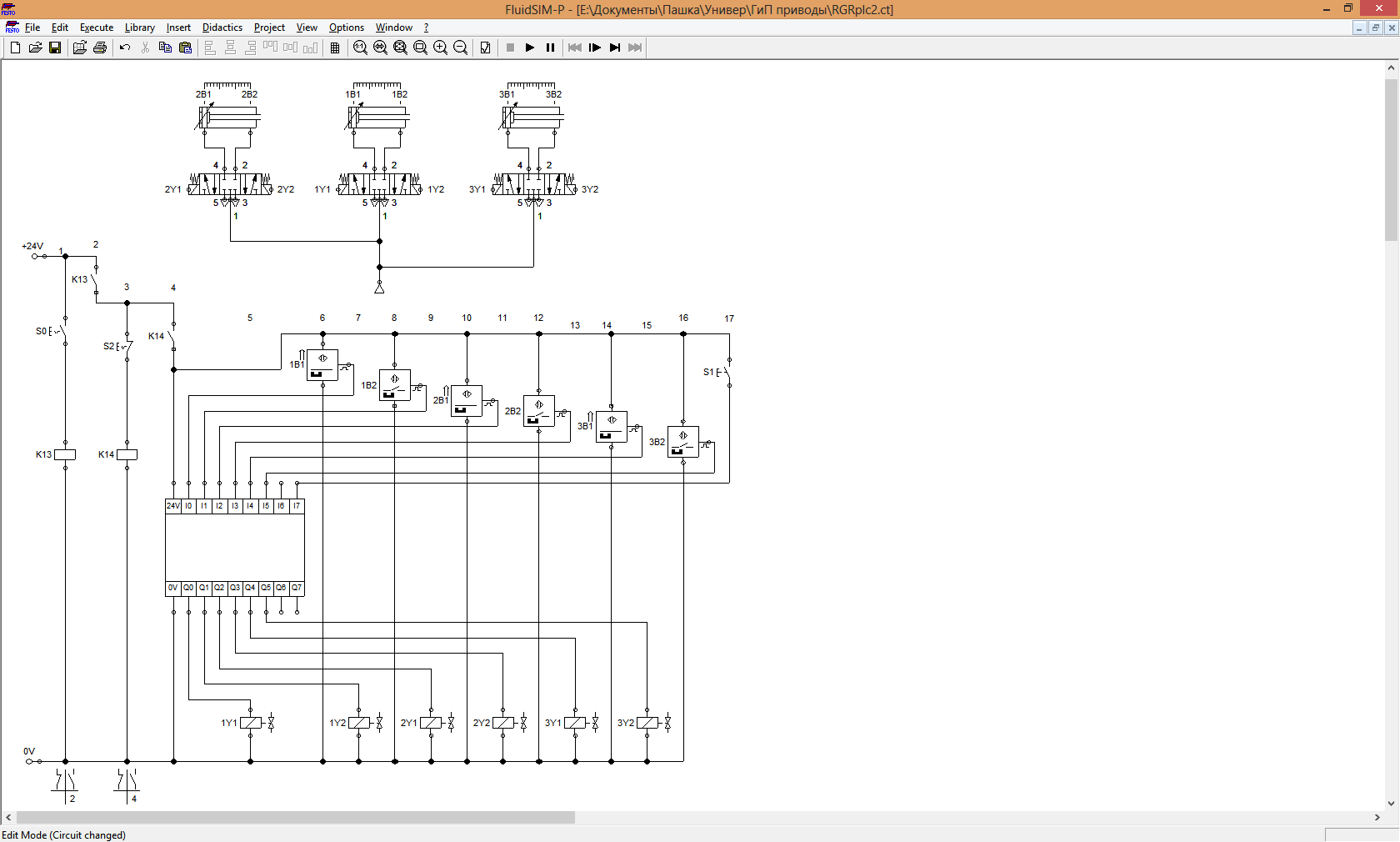
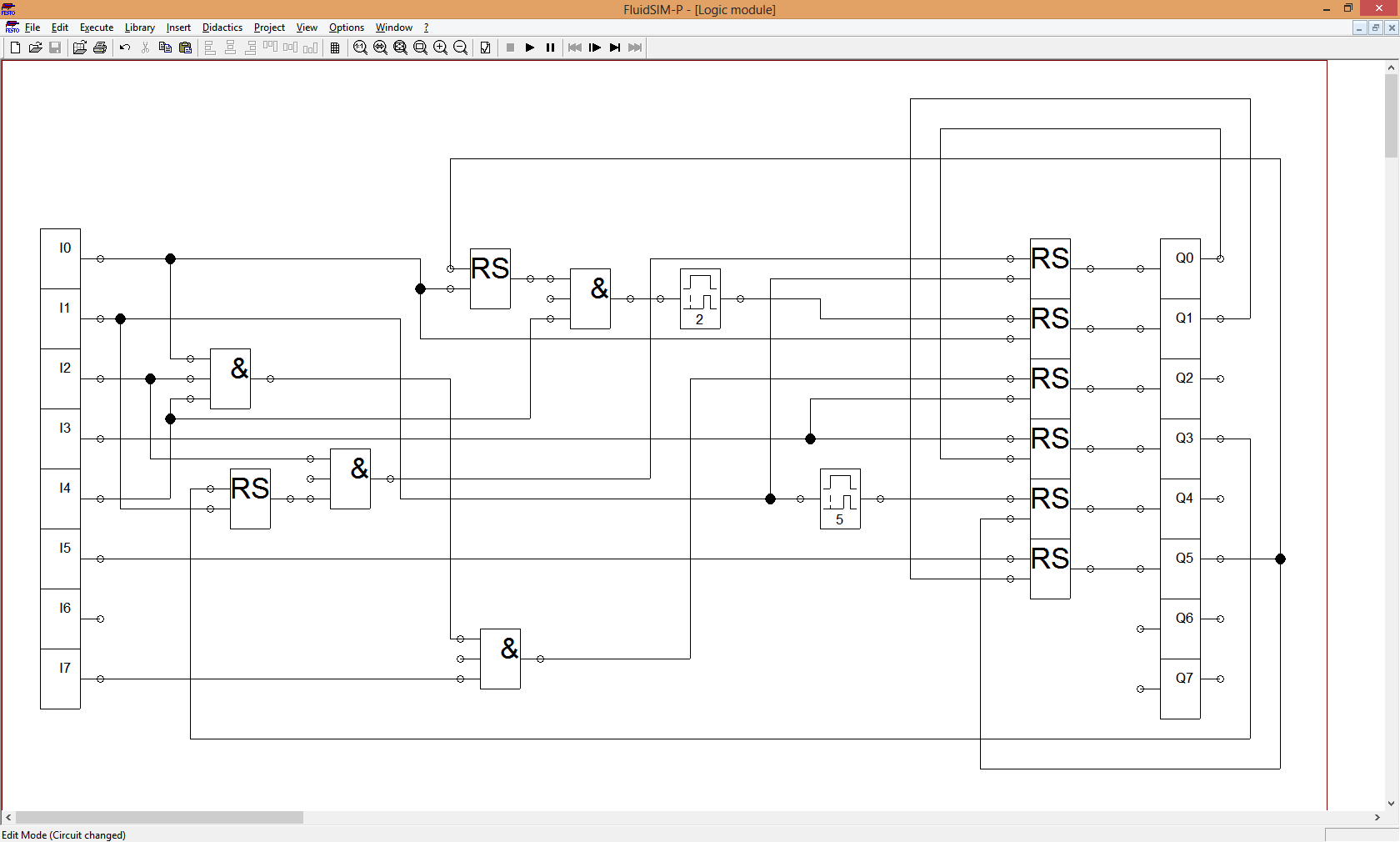
Пошаговое описание работы
Шаг 1 начинается с нажатия кнопки S1. Шток цилиндра 2А опускается.
Шаг 2 начинается, когда срабатывает датчик 2B2. Шток цилиндра 2А поднимается.
Шаг 3 начинается, когда срабатывает датчик 2B1. Шток цилиндра 1А перемещает тележку вправо.
Шаг 4 начинается после того, как сработает датчик 1B2 и сработает задержка 5 секунд. Шток цилиндра 3А опускается.
Шаг 5 начинается, когда срабатывает датчик 3B2. Шток цилиндра 3А поднимает груз.
Шаг 6 начинается после того, как сработает датчик 3B1 и сработает задержка 2 секунды. Шток цилиндра 1А возвращает тележку в исходное положение. После срабатывания датчика 1B1 система снова готова к циклу.
Список использованной литературы
-
Моделирование пневмосистем в среде FluidSIM: учебное пособие / Ковыршин С.В., Сегедин Р.А. — Иркутск: ИрГУПС, 2011. — 48 с.
-
Пневмоавтоматика. Основной курс TP101. Учебный курс / Festo Didactic. — 2006. — 145 с.