

Динамика
Закон сохранения импульса
Силы |
внутренние F (i) |
|
внешние |
F (e) |
|
В случае замкнутых (изолированных) систем внешние силы отсутствуют F (e) 0
Для замкнутых систем существуют такие функции от координат и скоростей частиц, которые не изменяют свои значения при их движении. Таких функций, называемых интегралами движения, имеется три:
1)энергия
2)импульс
3)момент импульса
Динамика
Закон сохранения импульса
|
|
dp1 F (i) F (e) |
, |
|
|
|
|
|
|
|
||
|
|
dt |
1 |
1 |
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
(i) |
(e) |
||||
+ |
|
dp2 |
|
|
|
|
|
|
pi |
Fi |
Fi |
|
|
|
|
|
|
|
|||||||
|
F2(i) F2(e) |
, |
|
dt |
i |
|
i |
i |
||||
|
dt |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
........................ |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
= 0 по 3 закону Ньютона |
|
|||||
|
F i(i) Fij |
1 (Fij Fji ) |
|
F i(i) 0 |
|
|||||||
|
|
|
i, j |
2 i, |
j |
|
|
|
|
|
|
|
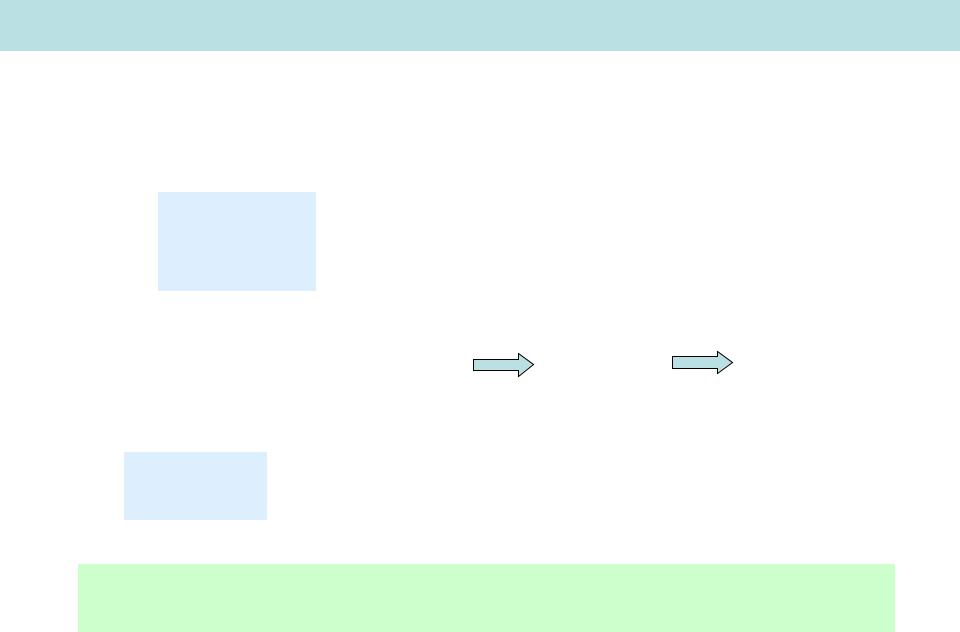
p pi |
– импульс системы |
i |
|
F (e) Fi(e) |
– результирующая внешних сил |
i |
|
Динамика
Закон сохранения импульса
dp |
F (e) |
– закон изменения импульса |
dt |
|
(неофициально) |
|
|
|
Для замкнутых систем F (e) 0 |
dp |
0 |
|
dt |
|||
|
|
p const |
– закон сохранения импульса |
|
(для замкнутых систем) |
Импульс замкнутой системы материальных точек остается постоянным.
Динамика
Закон сохранения импульса
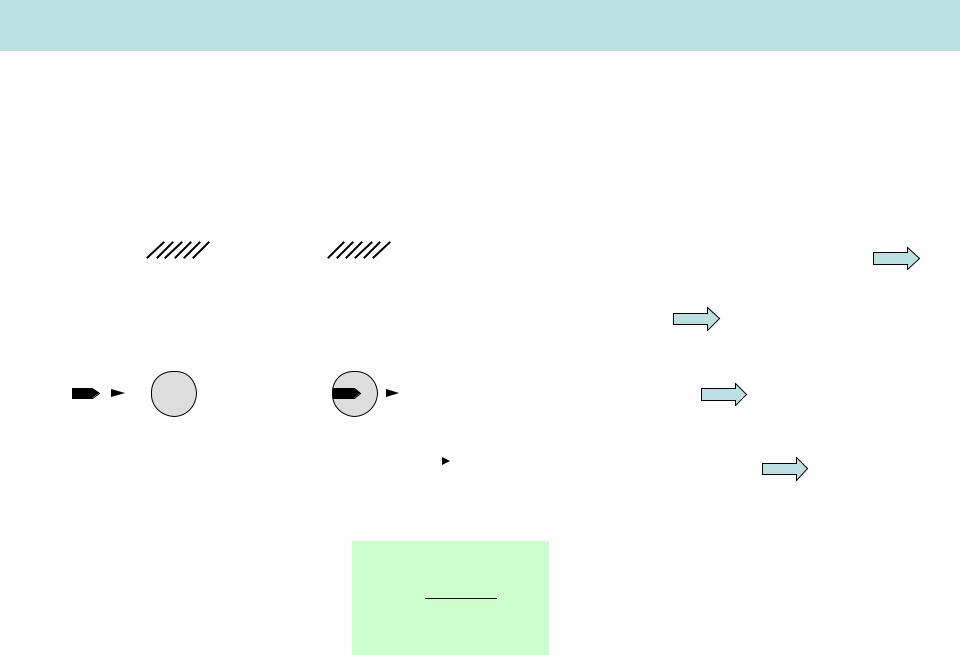
Баллистический маятник
|
|
|
|
|
|
|
|
|
|
|
|
Внешние (для шара и пули) силы: |
|
|
|
|
|
|
|
|
|
|
|
|
сила тяжести и сила натяжения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F (e) 0 |
|
|
|
|
|
|
|
|
|
|
|
|
t |
m v |
|
M |
M+m |
|
|
|
u = ? |
pt const |
||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||||||
|
|
mv (M m)u |
|
t |
|||
|
|||
u m v m M
Динамика
Теорема о движении центра масс
|
r |
mi ri mi ri |
– центр масс |
|||||
|
С |
mi |
m |
|
||||
|
d |
|
mrC |
d |
miri |
mvC mivi p |
||
dt |
dt |
|||||||
|
d |
mvC dp |
F (e) |
|
||||
|
|
|
||||||
|
dt |
|
dt |
|
|
|||
m |
dvC |
F (e) |
– теорема о движении центра масс |
|
dt |
||||
|
|
|
||
|
|
|
|
Центр масс системы движется как материальная точка, масса которой равна массе системы, а действующая сила – результирующей внешних сил, действующих на систему.
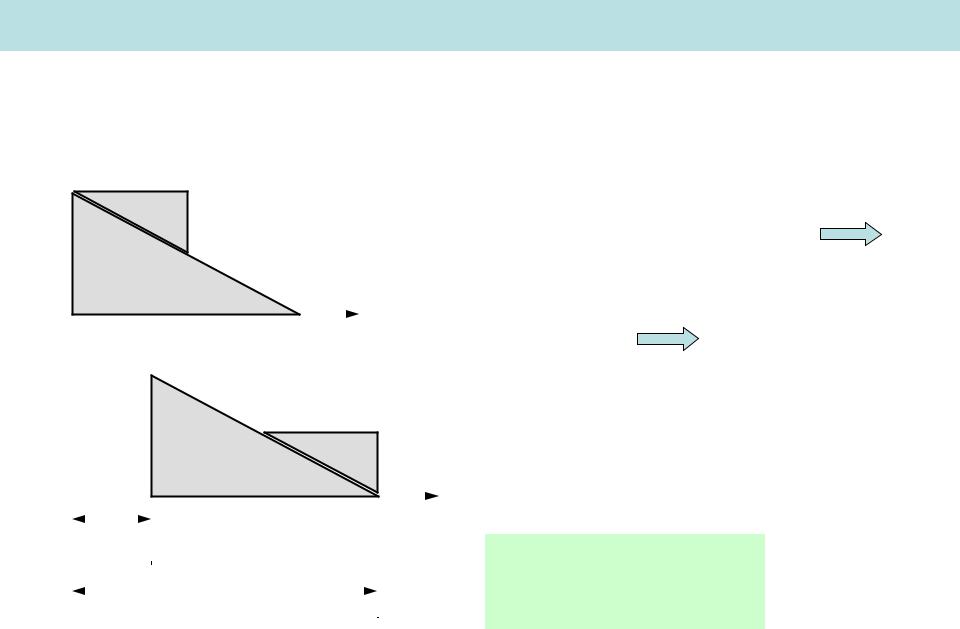
Динамика
Теорема о движении центра масс |
|
|
|
|
||||||||||||
|
|
a |
|
|
|
|
|
|
x – абсолютно гладкая поверхность. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
m |
|
|
|
|
|
|
Внешние силы – |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
сила тяжести и сила реакции x. |
|||
|
|
M |
|
|
|
|
|
|
Смещение ц.м. вдоль x = 0 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
mrC miri |
|
m rC mi ri |
|
|
|
|
|
|
|
A |
|
x |
|
|||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
rC, ri – смещения |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
M |
m |
В проекции на x |
m xC mi xi |
|||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
M xM m( xM A a) (m M ) xC 0 |
||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
x |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xM |
|
|
|
|
|
|
|
xM |
|
m |
(A a) |
|||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
m M |
|||
|
|
xm xM A a |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
xM < 0 M сдвинется влево.
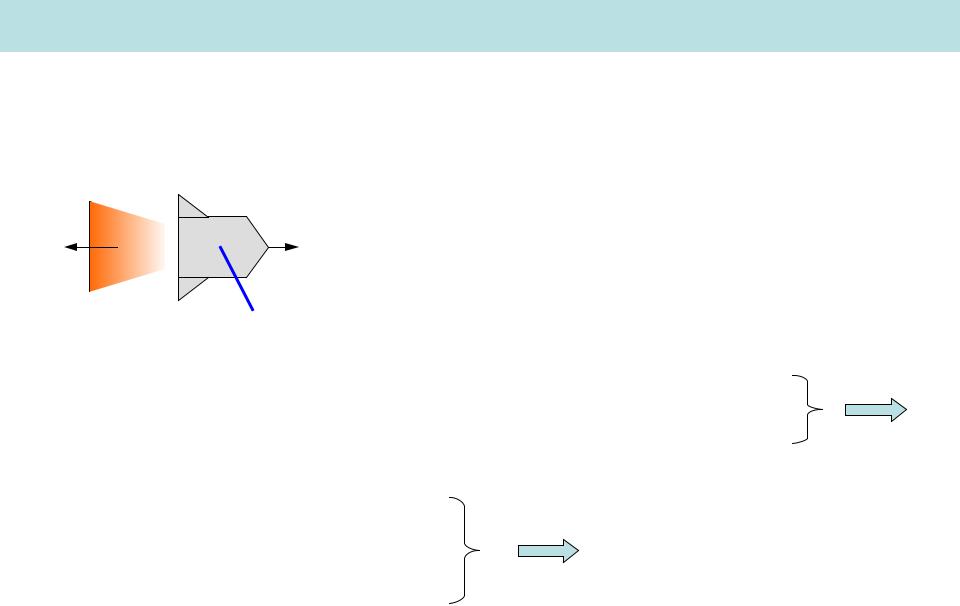
Динамика
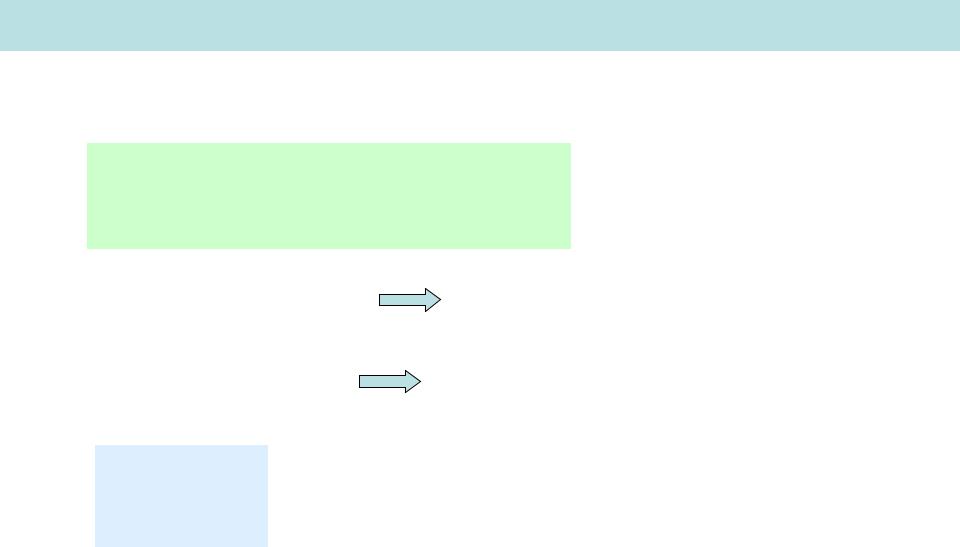
Движение тела переменной массы
m (t) m(t)
u |
v |
 F
F
v – скорость ракеты (основной массы), u – скорость газов (убывающей массы)
относительно ракеты, F – внешняя сила.
p(t) mv – импульс ракеты
p(t dt) (m dm)(v dv) dm (v u) – импульс ракеты и газов
dp mdv dm u dmdv
dm dm
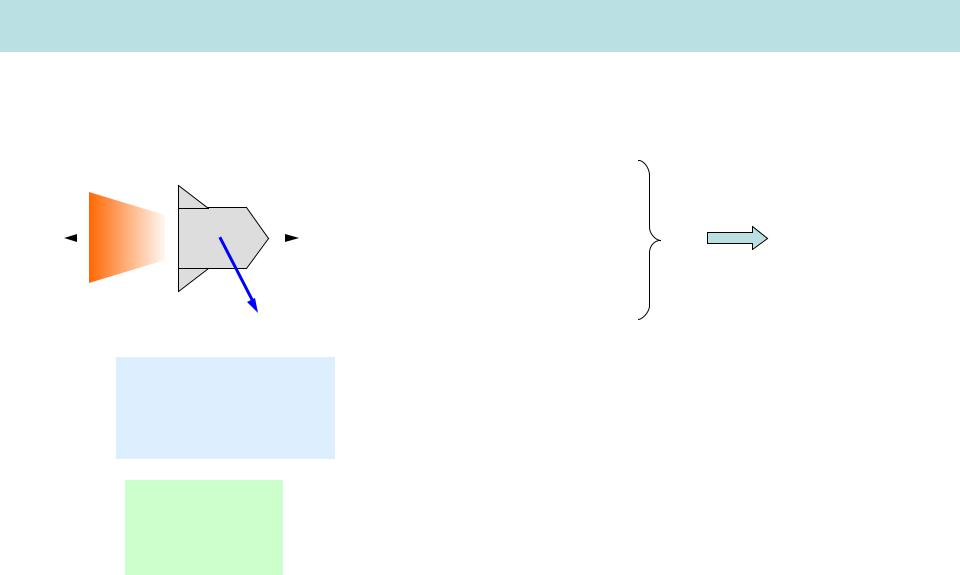
Динамика
Движение тела переменной массы |
|
|||||||||||||
|
|
|
|
m(t) |
|
|
|
|
|
|
|
|||
|
|
m (t) |
|
dp |
m |
dv |
dm u |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
dt |
dt |
||||
u |
|
|
|
|
|
|
v |
|
|
dt |
||||
|
|
|
|
|
|
|
|
dp |
F |
|
||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
F |
|
|
|
||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
dt |
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
m dv |
F dm u |
– основное уравнение динамики тела |
|||||||||
|
|
|
dt |
dt |
переменной массы (уравнение Мещерского) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
dm |
– реактивная сила |
|
|
dt u |
|
|||
|
|
|
||
|
|
|
dm |
|
Несколько каналов изменения m: |
|
|||
R |
ui |
|||
|
|
|
dt |
i |

Динамика
Движение тела переменной массы
|
|
|
|
m(t) |
|
|
Прямолинейное движение ракеты |
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
u |
|
|
|
|
|
v |
u = const, v(0) = 0 |
|
|
|
|
|
|
|
Уравнение Мещерского |
m dv |
dm u |
||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
dt |
dt |
dv u |
dm |
v u ln |
m |
|
m m ,то |
v u |
|||
|
|
|
|||||||
|
|
|
|
||||||
|
|
0 |
|
||||||
|
m |
|
|
m0 |
|
|
|
||
m m0 exp( v u) – формула Циолковского
u) – формула Циолковского
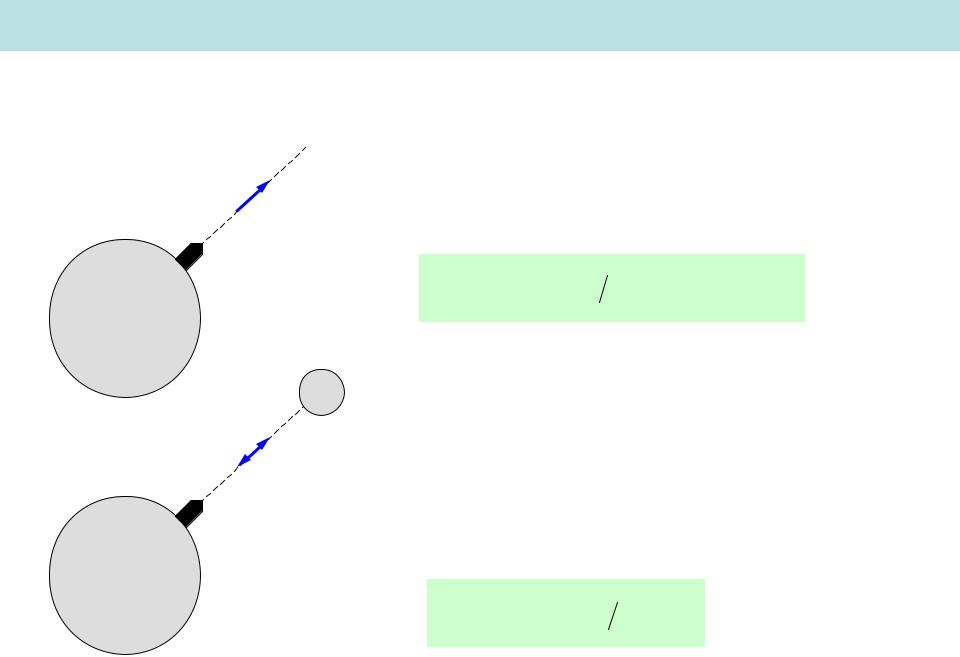
Динамика
Движение тела переменной массы
Путешествие по солнечной системе
2-я космическая скорость = 11.5 км/с u ~ 4 км/с
m m e 3 |
m 20 |
или 5% m |
0 |
0 |
0 |
|
Земля
|
Путешествие на Луну и обратно |
|
Луна |
2-я космическая скорость для Земли = 11.5 км/с |
|
|
2-я космическая скорость для Луны = 2.5 км/с |
|
|
u ~ 4 км/с |
|
Земля |
v ~ (11.5 + 2.5 + 2.5 + 11.5) км/с = 28 км/с |
|
|
|
|
|
m m e 7 |
m 1000 |
|
0 |
0 |