

02 АЗЭ Лекционный материал / лекция 14
.pdfЛекция №14 4.1. Дифференциальные уравнения электромеханических переходных
процессов в электрических системах, алгоритмы и способы их решения. Аналитическая и численная реализация критериев статической и динамической устойчивости. Алгоритмы частотного метода анализа переходных процессов.
Составление исходных уравнений Рассмотрим составление математических моделей элементов ЭЭС, необ-
ходимость и существо их преобразований первоначально для наиболее про-
стого случая: ЛЭП, расчетная схема которой состоит из индуктивностей и ак-
тивных сопротивлений (без учета емкостных проводимостей).
В соответствии с расчетной схемой уравнения переходных процессов в
этом элементе, связывающие падение u |
|
L |
|
dia |
M |
|
dii |
M |
|
dic |
r i |
|
, |
|||||||||||||||||||
|
|
|
ab dt |
ac dt |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
a |
dt |
|
|
a |
a |
|
||||
u b M ba |
di a |
L b |
di b |
|
M bc |
|
di c |
rb i b |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
dt |
|
dt |
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
u |
|
M |
|
|
di a |
M |
|
|
|
di b |
L |
|
di c |
r i, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
c |
ca |
|
cb |
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
dt |
|
|
|
|
dt |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где, в соответствии с принципом взаимности для коэффициентов взаимо-
индукции M ab M ba , M bc M cb, M ac M ca.
Эти уравнения в матричном виде выглядят следующим образом:
ua |
La M ab M ac |
|
|
||
|
|
|
|
d |
|
ub |
M ab Lb M bc |
|
|
||
dt |
|||||
|
|
|
|
||
|
|
||||
ub |
M ac M bc Lc |
|
|
||
ia |
ra 00 |
ia |
|||
|
|
|
|
|
|
ib |
0rb 0 |
ib . |
|||
|
|
|
|
|
|
ic |
00rc |
|
ic |
||
Для симметричного элемента примем
La Lb Lc L, Mab Mbc Mac M , ra rb rc r.
Тогда

uaubu
c
LML |
|
|
ia |
|
|
|
|
|
d |
|
|
MLM |
|
ib |
|||
dt |
|||||
MML |
|
|
|
|
|
|
|
i |
|
||
|
|
|
|
c |
|
r00 |
ia |
|
|
|
|
0r0 |
ib |
|
00r |
|
|
i |
||
|
|
c |
,
или в матричных обозначениях
u di R i . dt
При этом в установившемся режиме
ia I m sin 0t , Ib I m sin 0t 120o , ic I m sin 0t 120o .
Аналогично можно записать падение напряжений .
Для установившегося синусоидального режима уравнения рассматривае-
мого элемента могут быть записаны в комплексных величинах с использова-
нием действующих значений напряжения и точа U Um 

 2 и I Im
2 и I Im 

 2
2
U |
a |
Z |
|
|
|
|
|
||
|
|
|
|
|
U b |
|
Z |
||
U |
|
|
Z |
|
|
c |
|
|
|
Z
Z
Z
Z |
|
I |
|
|
|
|
|
Z |
I |
||
Z |
|
|
I |
|
|
|
|
a
b
c
,
где Z r j 0 L, Z j 0 M , 0
частота сети .
Или в матричных обозначениях
U z I .
Устойчивость в электрических системах и простейшие методы ее иссле-
дования.
Электрическая система, обеспечивающая своим нормальным функциони-
рованием работу промышленности, транспорта, быта населения - всю жиз-
ненную деятельность городов, районов и всей страны, должна работать надежно.
Основным условием надежной работы является ее устойчивость, под ко-
торой понимают способность системы восстанавливать свое исходное со-
стояние - нормальный рабочий режим или режим, практически близкий к
нему, после какого-либо нарушения этого режима, иначе называемого воз-
мущением различают два вида устойчивости:
статическую устойчивость, рассматриваемую в двух аспектax:
-как свойство заданного установившегося режима самовосстанавливаться при ничтожно малых отклонениях параметров его режима ПР от исходных значений, а не «сползать» от них;
-как свойство постепенно ухудшающегося установившегося режима про-
тивостоять малым отклонениям и малым колебаниям вплоть до некоторого
предельного режима. Эти два варианта подхода к устойчивости показаны на простейшем тилизованном аналоге на рис. 14.1, а, б;
-динамическую устойчивость, рассматриваемую при больших (обычно нелинейных) отклонениях параметров ЯР, часто сопровождающихся измене-
ниями конфигурации и параметров электрической системы (числа, работаю-
щих элементов) и значений их параметров.
Различают два вида динамической устойчивости:
синхронную устойчивость — сохранение режима при больших колебани-
ях, но без проворота (180—360°) ротора генератора;
результирующую устойчивость — восстановление режима после кратко-
временного нарушения (например, при работе в течение некоторого времени генераторов электрической системы или ее частей несинхронно), но при вос-
становлении нормальной синхронной работы после нескольких проворотов ротора. Это восстановление может происходить самостоятельно в силу внутренних свойств системы или под действием специальных устройств си-
стемной автоматики.
На рис. 14.2, а, б показаны простейшие стилизованные аналоги двух ви-
дов динамической устойчивости.
Для обеспечения устойчивости система должна работать с некоторым за-
пасом, характеризуемым коэффициентом запаса К3, т. е. при таких парамет-
рах режима, которые отличаются в К3 > 1 раз от критических - тех, при кото-
рых может произойти нарушение устойчивости. Для определения запаса

устойчивости в, данной (работающей или прогнозируемой) системе, пара-
метры которой известны, и для выбора мероприятий, улучшающих устойчи-
вость, необходим анализ (расчеты) устойчивости с определением критиче-
ских параметров.
В ряде случаев необходим переход к задачам синтеза, например к нахож-
дению изменении параметров режима во времени: Пр = f(t), т. е. установле-
нию вида переходного процесса с выявлением вносимых с помощью устройств системной автоматики воздействий, которые придадут переходно-
му процессу желательный по тем или иным соображениям характер.
Выбор устройств и мероприятии действующих во время протекания про-
цесса, например таких, которые способствуют восстановлению синхронизма после его нарушения и обеспечивают этим результирующую устойчивость,
относится к задаче управления переходным процессом.
В настоящей главе будут рассмотрены простейшие случаи устойчивости режима по условиям сползания и синхронная динамическая устойчивость.
Рис. 14.1 Статическая устойчивость (стилизованные аналоги) положения (режима):
а-устойчивое 1 и неустойчивое 2 положения; б - колебательная устойчивость 1 и не-
устойчивость в процессе колебаний 2 с выходом из режима 3

Рис. 14.2. Динамическая устойчивость (стилизованные аналоги):
а-синхронная устойчивость: В - возмущение; 1 - неустойчивый процесс 2-колебания б-результирующая устойчивость: возвращение в исходное состояние 2 из неустойчи-
вого 1
Совмещение расчетов нормального режима и оценки его статической
устойчивости.
Если в процессе расчета нормального режима системы, обычно проводи-
мого итеративно на каждом его этапе, то прохождение его через нуль будет сразу же указывать на физическую неустойчивость данного режима, прояв-
ляющегося в виде сползания или текучести.
Математически D = 0 должно означать нарушение сходимости (устойчи-
вости) математического решения. Связь между сходимостью (математиче-
ской устойчивостью) и физической устойчивостью заключается в том, что при подходе к предельному режиму "ухудшается обусловленность матрицы,
что, в свою очередь, ухудшает сходимость.
Однако такой подход к оценке устойчивости встречает трудности. В при-
нятой практике расчетов нормального режима эти расчеты связаны с итера-
тивными решениями системы нелинейных уравнений, имеющих в векторной записи вид:W(x, у)=0,
где W - вектор-функция небалансов мощностей в узлах системы; х, у-
векторы зависимых и независимых переменных.
Итеративные решения (например, по методу Ньютона) не всегда облада-
ют вычислительной устойчивостью - сходимостью в физически устойчивом,
установившемся режиме - и, наоборот, могут быть вычислительно устойчи-
выми в режиме физически неустойчивом. Поэтому для выявления устойчи-
вости итеративные расчеты установившихся режимов выполняются при до-
полнительных условиях.
Простейшая оценка устойчивости перехода от одного режима к
другому (динамическая устойчивость).
Выше были рассмотрены условия устойчивости системы, которая подвер-
галась в установившемся режиме случайным, очень малым возмущениям
(отклонениям режима), т. е. условия статической устойчивости. Для их опре-
деления применялись практические критерии, основанные на совместном рассмотрении статических характеристик электрических и механических мощностей (вращающих и тормозящих моментов). Статические характери-
стики, полученные при очень медленных изменениях режима, отражают установившееся его состояние. Они не зависят от скоростей изменения пара-
метров режима и характеризующих эти скорости параметров системы (по-
стоянные инерции, постоянные времени контуров ротора вращающихся машин).
При появлении в системе больших возмущений (резких изменений режи-
ма), таких как короткие замыкания, отключения или включения нагрузок, ге-
нераторов, трансформаторов, линий передач и других элементов системы,
вместо статической задачи (статической устойчивости) приходится рассмат-
ривать задачу динамическую (динамическую устойчивость).
При этом необходимо учитывать нелинейности основных характеристик
[Р = φ(δ), Q = ψ(δ) и т. д.] и, рассматривая движение системы, учитывать ее инерционные параметры, определяющие скорости изменения параметров режима.
При больших возмущениях, связанных с резкими изменениями режима, э.
д. с. генераторов не будут неизменными, как это с достаточным основанием принималось при рассмотрении малых возмущений (статической устойчиво-
сти). Однако учет изменения э. д. с. во времени [Е =f(f)] сильно осложняет расчеты п в первом приближении их можно упрощенно проводить, учитывая генераторы квазипереходными (квазидинамическими) характеристиками мощности, т. е. при Е = Е' = const.
Х
1 |
а) |
|
|
|
|
U=const |
|
|
|
|
|||
|
|
|
|
|
||
1 |
1 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1
б)
U=const
1 1
Рис.14.3 Исследуемая схема простейшей системы «станция-шины»
а – исходная схема I; б – схема после отклю-
чения
Тогда для простой системы (рис. 14.3, а) запишем
P E 2 y sin |
11 |
EUy sin( |
12 |
) |
(14.1.а) |
||
11 |
|
12 |
|
|
|
||
Если активное сопротивление не учитывается, то |
|
|
|
||||
P EUy sin или P |
EU |
sin |
|
|
(14.2.б) |
||
|
|
|
|||||
12 |
|
|
x12 |
|
|
|
|
|
|
|
|
|
|
||
где y12 1/ x12 . В простейшем случае х12 |
=х∑ - суммарное сопротивление |
||||||
цепи от точки приложения э. д. с. Е до шин U (рис. 14.3 б).
Электромагнитный момент, действующий на валу генератора и опреде-
ляющий характер его движения, находится как М = Р/ω, однако в тех элек-
тромеханических процессах, которые будут рассматриваться в этом парагра-
фе, можно без большой погрешности принять 0 0 .
Основанием для этого является то, что скорость в начале процесса
вследствие большой инерционности ротора изменяется медленно
(100-200 град/с) и составляет, следовательно, не более 1—2% по отноше-
нию к синхронной скорости (ω0 = 360*50 = 18 000 град/с).
В условиях таких малых изменений скорости для приближенных расчетов устойчивости обычно принимают, что при записи в относительных единицах
(при ω0 = 1) изменения момент* численно равны изменениям мощности:М Р /( 0 ) Р / 0 или М* Р* соответственно М* - Р*.
Заметим, что далее на рисунках и в формулах звездочка будет опускаться.
Рассмотрим резкое изменение режима в системе (рис. 14.3 а, б), вызван-
ное отключением одной из параллельных цепей электропередачи. Предполо-
жим сначала, что активное сопротивление не учитывается, и построим со-
гласно (14.1 характеристики режима (рис. 14.3 а).
Из рассмотрения этих характеристик следует, что резкое изменение пара-
метров системы приводит к переходу ее из режима I, соответствующего схе-
ме I, в режим II,отвечающий схеме II. Это вызывает изменение электромаг-
нитного |
момента |
|
на валу каждого генератора системы от, М I M |
T |
до |
|||||
|
|
|
|
|
|
|
|
0 |
|
|
M II |
M |
T |
(рис. 14.3, а). Появившийся небаланс между ускоряющим момен- |
|||||||
0 |
|
|
|
|
|
|
|
|
|
|
том турбины M 0 |
и тормозящим электромагнитным моментом генератора |
|||||||||
( M |
0 |
M |
T |
M II |
) приводит к тому, что генератор начинает изменять ско- |
|||||
|
|
|
|
|
|
|
|
|
||
рость.
Если M II MT , то скорость будет увеличиваться сверх синхронной на величину (рис. 14.3, б). Избыточный момент M при этом будет уравно-
вешиваться не только электромагнитным моментом, соответствующим отда-
ваемой генератором В сеть электроэнергии, но и моментом, отвечающим накапливаемой ротором кинетической энергии, определяемой как
Md A.
Уравнение движения генератор в простейшем случае (без учета демпфи-
рования и действия регулирующих устройств) запишется следующим образом:
M MT M II Tj d / dt
Здесь Tj - некоторый коэффициент, характеризующий инерцию ротора ге-
нератора; - изменение угловой скорости по отношению к синхронной
ω0; d / dt d 2 / dt - ускорение; δ - угол сдвига э. д. с. генератора по отношению к оси, вращающейся с угловой скоростью ωо.
Числовое значение и размерность коэффициента Tj зависят также от спо-
соба записи уравнения и размерности остальных его членов. В общем случае момент М является функцией скорости и изменяется при изменении режима
системы:
M II ( , )
В простейшем случае предполагается, что M II M II sin . Тогда запи- |
|||||||||
|
|
|
|
|
|
|
|
|
m |
шем T |
d |
2 / dt |
2 M |
0 |
M II sin , или, полагая М = Р, |
||||
|
|
j |
|
|
|
|
|
m |
|
T |
|
d 2 |
|
P |
P II |
sin |
(14.3) |
||
j dt |
|
||||||||
|
2 |
0 |
m |
|
|
|
|||
Любые начальные изменения режима получают отражение в изменении угла δ0, значениях мощности Р0, амплитуды характеристики Рm.
Частотный метод расчета импульсных процессов на примере по-
гружных электродвигателей(ПЭД).
Для исследования внутриобмоточных явлений ПЭД при импульсных воз-
действиях использован частотный метод анализа переходных процессов.
В схемах электроснабжения ПЭД с одним и с двумя трансформаторами анализ переходных процессов при импульсных воздействиях проводился экспериментально с помощью анализатора переходных процессов (АПП).
При этом были получены осциллограммы переходных процессов в разных точках схем. В частности, на входе кабеля (рис.14.4, а, точка 2, рис. 14.4.6, б,
точка 3) и на зажимах погружного электродвигателя (рис. 14.4, а, точка 3,
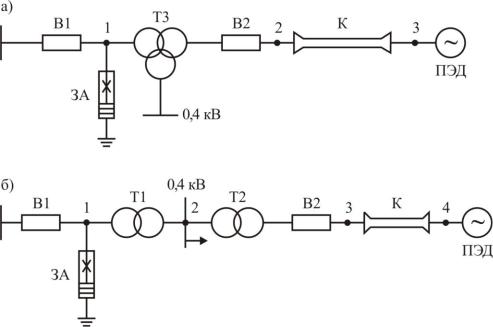
рис. 14.4, б, точка 4) при установке различных защитных аппаратов в различ-
ных точках.
Рис. 14.4. Принципиальные схемы электроснабжения ПЭД
а) с одним трансформатором; б) с двумя трансформаторами
Проведение исследований переходных процессов в обмотках ПЭД экспе-
риментально невозможно (ПЭД – маслонаполненная, герметичная система),
потому для исследования распространения волн и оценки градиентных пере-
напряжений внутри обмотки ПЭД использован частотный метод анализа пе-
реходных процессов.
Зная форму воздействия на кабель и форму кривой на зажимах ПЭД, по-
лученные экспериментально, можно оценить погрешность частотного мето-
да, для которого задача сводится к расчету переходных процессов в системе
«кабель – ПЭД». Анализ расчетов показывает, что частотный метод расчета переходных процессов не дает погрешности больше 10 % (рис. 14.5). Что ка-
сается оценки внутриобмоточных явлений ПЭД, задача сводилась к расчету переходных процессов в обмотке двигателя.