

4. Перспективные технологии повышения безопасности движения и маневровой работы на станции
Анализ столкновений, произошедших в 2005 – 2006 г.г. на станциях Северной ж.д. и Горьковской ж.д. показал, что все они были обусловлены одинаковыми причинами:
не наблюдение за показаниями светофоров,
не соблюдение скоростного режима,
отсутствие у машиниста информации о расстоянии до запрещающего сигнала или тупиковой призмы.
В настоящее время разработана технология повышения безопасности на базе, которой разработаны технические средства Маневровой автоматической локомотивной сигнализации (МАЛС), а также станционные устройства многоуровневой системы управления и обеспечения безопасности (МС), позволяющие взаимодействовать с маневровыми (оборудованными МАЛС) и поездными локомотивами (оборудованными КЛУБ-У) по цифровому радиоканалу.
Ниже, на основе разбора столкновений, произошедших на станциях Лоста, Ярославль – Главный Северной ж.д., ст. Балезино Горьковской ж.д. проведено моделирование использования технологии повышения безопасности движения на основе МАЛС и МС.
4.1. Разбор столкновения произошедшего на станции Лоста Северной ж.Д. 27.10.2005 года.
Поездная ситуация представлена на рис.1.
1. Маневровый локомотив ЧМЭ3 №6379 находился на участке пути Г4П. Грузовой поезд №2627 находился на 4 пути парка А.
2. ДСП задал маршрут отправления грузовому поезду №2627 с 4 ого пути парка А через светофор ЧМ2. Одновременно ДСП задал маршрут маневровому локомотиву от светофора Г4 в сторону сортировочного парка.
3. Машинист, получив команду о заданном маршруте, привёл локомотив в движение. При этом он не проконтролировал правильность направления движения локомотива (реверсор локомотива находился в положении «назад»; локомотив начал двигаться в сторону светофора М103) и не убедился в показаниях сигналов (М103 – запрещающее показание, Г4 – разрешающее показание).
4. В это время грузовой поезд №2627следовал по стрелкам 125 и 123. В результате проезда маневровым локомотивом запрещающего сигнала М103 произошло столкновение маневрового
При моделировании ситуации события развивались бы следующим образом.
1. Поездная ситуация на станции контролируется системой и отображается на экране монитора АРМ ДСП системы МАЛС (рис.2). На плане станции отображается местоположение подвижных единиц, а в верхней части представлена информация о локомотивах, находящихся в системе, указано расстояние в метрах до запрещающего сигнала, находящегося со стороны, определяемого положением реверсора локомотива.
2. При задании ДСП маневрового маршрута от светофора Г4 в сторону спускной части горки бортовая аппаратура получает маршрутное задание по цифровому радиоканалу. При этом в системе заложен контроль следующих параметров с отображением их на блоке индикации машиниста (рис.3):
Расстояние до сигнала Г4 (100 м) отображается в левом верхнем углу локомотивного блока индикации (БИ);
Допустимая скорость движения для заданного маршрута - 25 км/ч - согласно ТРА для данной секции отображается в верхней части БИ;
Расстояние до запрещающего сигнала (75 м) отображается в левом нижнем углу БИ;
Допустимая скорость движения в сторону сигнала М103 ограничена 5 км/ч с учётом кривой торможения, заложенной в память бортовой аппаратуры.
В системе заложена возможность движения в пределах изолированной секции, на которой находится локомотив, но с контролем выхода на кривую торможения и снижением допустимой скорости вплоть до остановки локомотива перед запрещающим сигналом для предотвращения проезда.
3. В случае начала движения локомотива в сторону сигнала М103 (рис.4), то есть в противоположную сторону заданному маршруту система предупреждает машиниста сигналом проверки бдительности о «неправильном» направлении движения. С учётом того, что расстояние до сигнала уменьшается (60 м) система снижает допустимую скорость локомотива с 5 до 3 км/ч, для того, чтобы тормозной путь локомотива при экстренном торможении не превысил 60 м и не произошло проезда запрещающего сигнала. Длина тормозного пути для локомотива ЧМЭ3 при скорости 5 км/ч составляет 30 метров.
4. В случае если машинист не реагирует на сигналы предупреждения и локомотив продолжает движение в сторону сигнала М103 (рис.5) происходит сокращение расстояния до запрещающего сигнала и возникает угроза проезда сигнала М103. Система инициирует автоматическое включение экстренного торможения локомотива и останавливает его.

Рис.1.
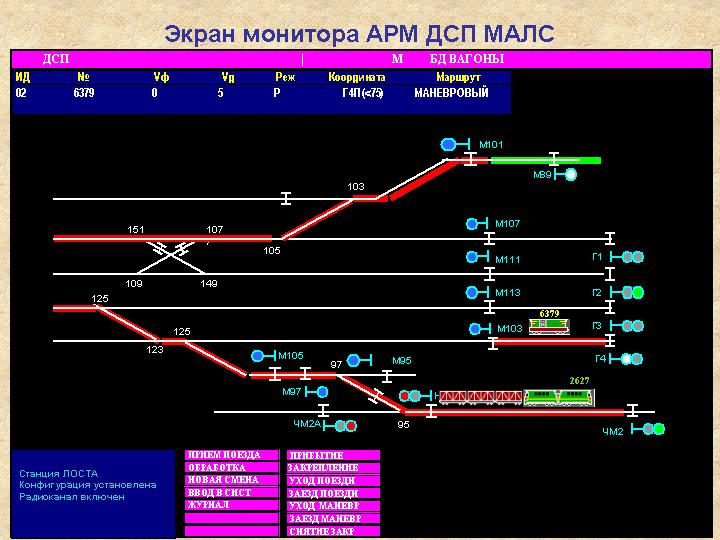
Рис.2
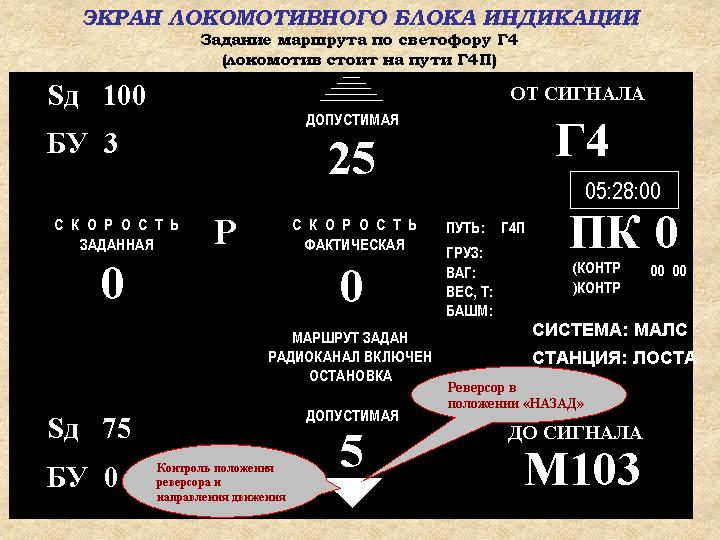
Рис. 3

Рис.4

Рис.5
Выводы:
В случае оборудования станции Лоста Севрной ж.д. и эксплуатируемых на ней маневровых локомотивов аналогом системы МАЛС (для сортировочных станций – ГАЛС Р), столкновение, произошедшее 27.10.05 удалось бы избежать, так как маневровый локомотив ЧМЭ3 №6379, движущийся в сторону запрещающего сигнала М103 был бы автоматически остановлен системой на расстоянии 30 м до сигнала. Система предотвратила бы проезд запрещающего сигнала и последовавшее за этим столкновение с грузовым поездом.