

Элементарная теория следящей сау
Для того чтобы показать, как работают совместно рассмотренные выше типовые узлы, и облегчить изложение действия узлов с различными внутренними обратными связями, в настоящем параграфе рассматривается простейший вариант линейной непрерывной следящей САУ, имеющей только одну главную обратную связь (с пропорциональным регулированием).
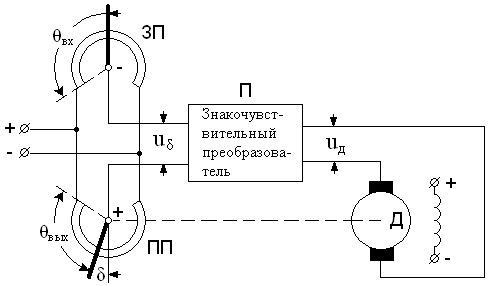
Рис. 1.
Простейшая следящая САУ представлена на рис. 1. Она состоит из потенциометрического измерительного элемента, включающего задающий и приемный потенциометры ЗП и ПП, знакочувствительного усилителя или преобразователя П и электродвигателя независимого возбуждения Д. Вал двигателя приводит в движение из показанный на рисунке управляемый объект и соединен непосредственно или через редуктор с осью приемного потенциометра.
Если углы θвх и θвых равны нулю, то uδ = uд =0 и двигатель неподвижен. Если теперь переместить ползушку задающего потенциометра ЗП от его нулевого положения на угол θвх, то на выходе измерительного элемента появится напряжение, пропорциональное разности между входным и выходным углами или ошибке δ [см.(1)]. Следовательно, измерительный элемент преобразует ошибку в пропорциональное ей по величине напряжение uδ:
uδ = К1δ (1)
Напряжение uδ управляет знакочувствительным преобразователем, обеспечивающим напряжение определенной полярности на якоре двигателя uд, пропорциональное напряжению uδ. Этот преобразователь конструктивно может быть любым из описанных в главе 2 и 7, в том числе электронным, полупроводниковым, электромашинным или магнитным. Принято, что он имеет постоянный коэффициент усиления по напряжению К2 и считается нами безынерционным. Тогда с учетом (1)
uд = К2 uδ = К1К2δ. (2)
Уравнение движения
![]()
![]() (3)
(3)
![]()
![]()
Момент двигателя без учета электромагнитной инерции якорной цепи
![]() (4)
(4)
Здесь b = ∆M/∆Ω— коэффициент жесткости механической характеристики
двигателя;
Мк и Iк — момент и ток короткого замыкания двигателя;
rя — сопротивление якорной цепи;
См — коэффициент.
Подстановка из (4) и (2) в (3) дает:
![]() (5)
(5)
Получаем линейное дифференциальное уравнение, связывающее входной угол θвх и ошибку δ,
![]() (6)
(6)
Здесь
![]()
В уравнении (6) для большей общности коэффициент Ь заменен коэффициентом F. Последний при наличии в системе вязкого трения является суммой коэффициентов жесткости механической характеристики двигателя b и вязкого трения F1, пропорционального скорости вращения выходной оси,
![]() (7)
(7)
Если можно пренебречь статическим моментом Мс и принять, что имеет место режим «постоянной заводки» θвх = Ωуt∙l(t), где Ωу =const, то (6) превращается в дифференциальное уравнение ошибки
![]() (8)
(8)
Ошибку в настоящей линейной системе можно рассматривать как сумму установившейся и свободной составляющих
![]() (9)
(9)
Установившаяся ошибка получается из (8) при производных, равных нулю,
![]() (10)
(10)
Свободная ошибка может быть найдена при решении (8) с правой частью, равной нулю,
![]() (11)
(11)
Характеристическое уравнение
![]() (12)
(12)
Корни этого уравнения
![]()
(13)
Решение уравнения (8):
![]() (14)
(14)
Проведем небольшое исследование (14).
1. Предположим, что в системе отсутствует затухание.
При этом
![]()
![]()
Тогда
![]() (15)
(15)
В этом
случае в системе возникают незатухающие
колебания с максимальной ошибкой
![]() и собственной частотой колебании
и собственной частотой колебании
![]()
Графики ошибки входного и выходного углов приведены на рис. 2а.
2. Пусть теперь коэффициент затухания F равен критическому значению Fкp, «разделяющему» колебательные и апериодические процессы.
Положим
![]() .При
этом ω = 0,
.При
этом ω = 0,
![]()
и
![]() .
(16)
.
(16)
В этом случае ошибка изменяется апериодически и при малейшем уменьшении F переходный процесс получает колебательный характер. Увеличение затухания до критического приводит к большей ошибке в установившемся режиме и более медленному протеканию переходного процесса.
Графики ошибки входного и выходного углов для второго случая приведены на рис. 2,6.
3. Обычно коэффициент затухания F выбирается меньшим критического, поэтому переходные процессы при ступенчатом возмущении получаются колебательными с амплитудой, уменьшающейся с течением времени. Характер переходного процесса в рассматриваемой системе для F < Fкp принципиально показан на рис. 9-9,в.
Если подать на вход системы ступенчатый сигнал θвх0 ∙ l(t), где θвх0 =const, и изменять коэффициент затухания, то переходные процессы можно представлять
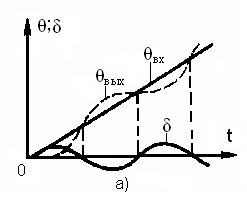

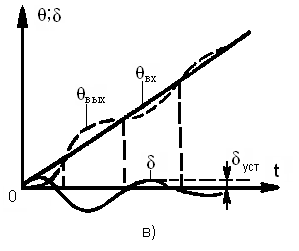
Рис. 2.
кривыми
δ/ θвх
(Рис. 3). Здесь введен относительный
коэффициент затухания![]() . С уменьшением ξ (начиная, например,
. С уменьшением ξ (начиная, например,
с ξ = 0,8) растет амплитуда колебаний, и ошибка системы медленнее входит в область заданной, например 5%-ной, точности. С увеличением ξ переходный процесс становится апериодическим. Время достижения установившейся ошибки δ уст при этом также затягивается. Следовательно, существует оптимальное затухание ξ ≈ 0,7, при котором время вхождения ошибки в область 5%-ных отклонений от установившегося значения является минимальным. Отметим, что коэффициент затухания F является параметром, сильно влияющим на характер переходного процесса.
Если не пренебрегать моментом статического сопротивления и считать его моментом трения Мс = const, то для нахождения максимальной ошибки в неподвижном состоянии системы или так называемой статической ошибки можно воспользоваться (6), откуда
![]() (17)
(17)
Отсюда следует, что статическая ошибка прямо пропорциональна моменту статического сопротивления Мс и обратно пропорциональна коэффициенту усиления K.
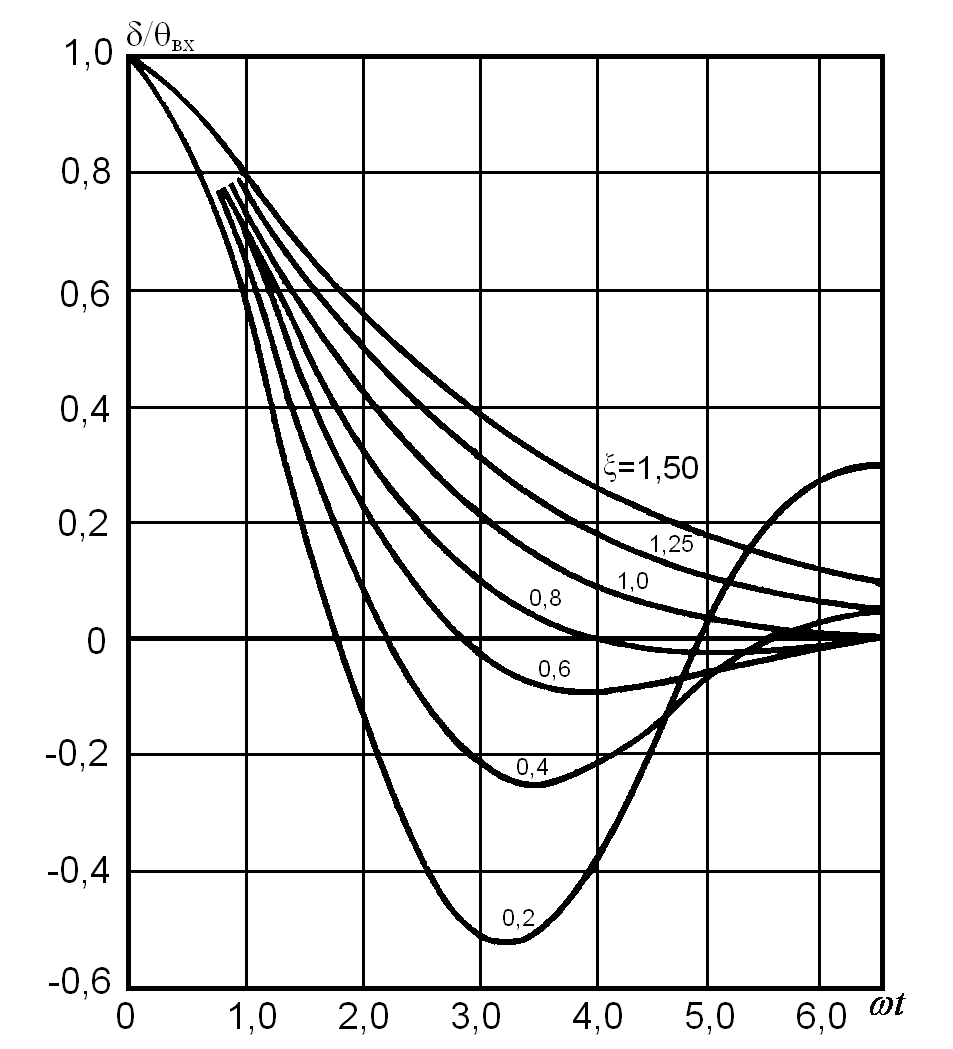
Рис. 3.
Из уравнения (6) можно получить также ошибку установившегося движения при прежнем Мс = const и установившейся скорости движения
Ωу =const. Действительно,
![]() (18)
(18)
Здесь к статической ошибке добавилась так называемая скоростная (кинетическая) ошибка δ ск
![]() (19)
(19)
Скоростная ошибка пропорциональна коэффициенту затухания и скорости заводки и обратно пропорциональна коэффициенту усиления К. Увеличение ошибки в (18) в сравнении с (17) физически объясняется тем, что при установившемся движении возникает противо-э. д. с. двигателя, для преодоления которой и создания необходимого установившегося тока в якоре нужно повысить напряжение на двигателе uд, а это согласно (2) приводит к возрастанию ошибки.