Курсовая работа по тмм
.doc
Федеральное агентство морского и речного транспорта
Федеральное государственное образовательное учреждение
высшего профессионального образования
Волжская государственная академия водного транспорта
Кафедра прикладной механики
и подъемно-транспортных машин
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
Исследование семизвенного механизма и синтез эвольвентного зубчатого зацепления
К КУРСОВОЙ РАБОТЕ
Студент ________ Цибизов М М ________________________ /
Руководитель ______ Торнопольская Т И _____________________ /
2013 г.
|
Содержание
Содержание 2 Техническое задание 3 1. Структурное исследование плоского механизма 4 Гр3 7 7 2.2. План скоростей механизма 8 2.3. План ускорений механизма 11 3. Синтез эвольвентного зубчатого зацепления 14 Список использованной литературы 17
|
|||||||||||||||
|
|
|
|
|
|
Курсовая работа по ТММ |
||||||||||
|
|
|
|
|
|
|||||||||||
|
Изм. |
Лист. |
№ докум. |
Подпись |
Дата |
|||||||||||
|
Разраб. |
Цибизов |
|
|
Структурное и кинематическое исследование механизма. Синтез эвольвентного зубчатого зацепления. |
Лит. |
Лист |
Листов |
||||||||
|
Проверил |
Торнопольская |
|
|
1 |
|
|
2 |
20 |
|||||||
|
Принял |
|
|
|
ВГАВТ ДСМ-21 |
|||||||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
||||||||||||
|
Техническое задание Вариант 1.3
1. Выполнить структурное исследование плоского механизма. 2. Выполнить кинематическое исследование плоского механизма. 3. Выполнить синтез эвольвентного зубчатого зацепления.
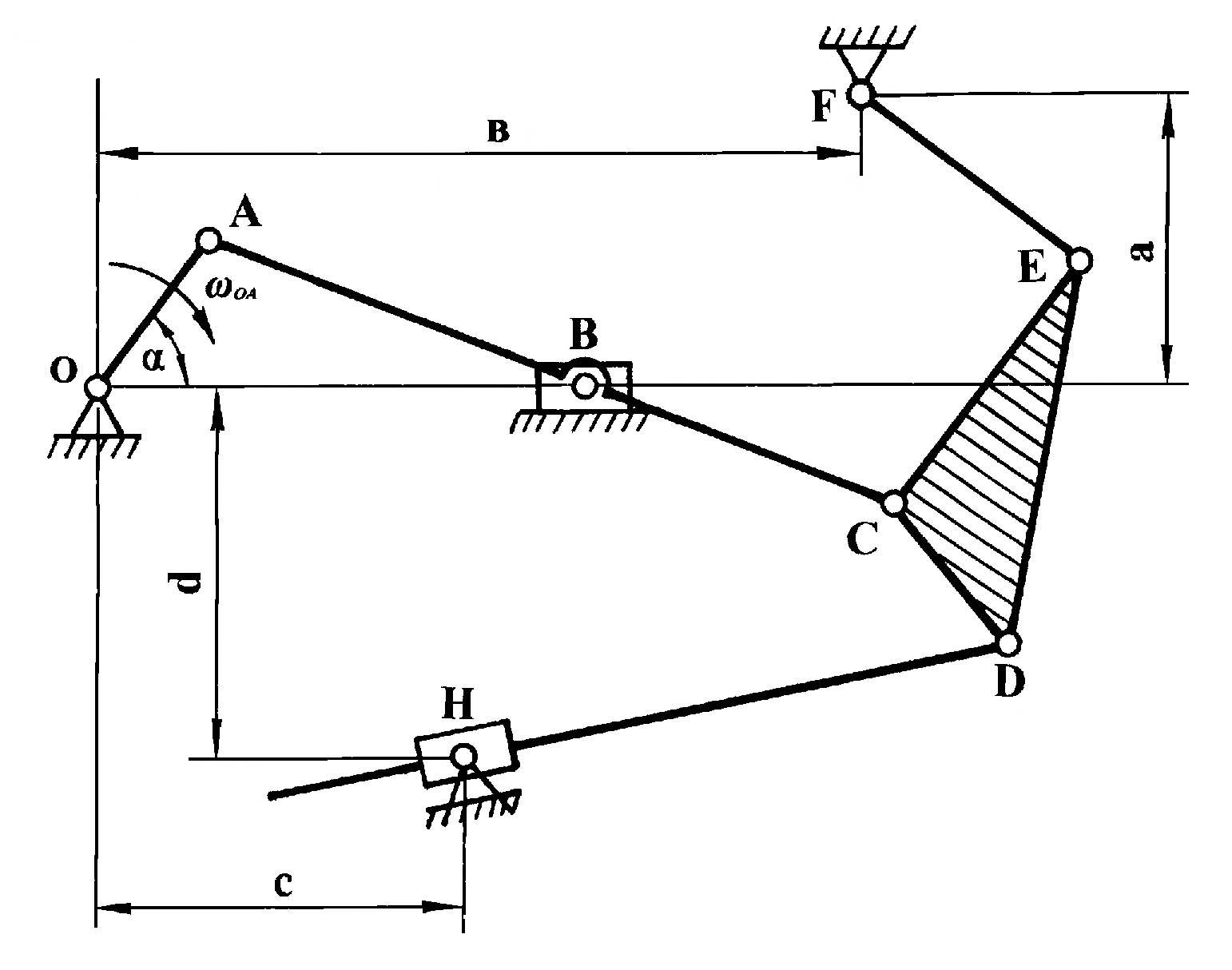
Исходные данные: LOA = 0,15 м; LАВ =0,58; LВС = 0,23 м; LCE = 0,33 м; LEF = 0,27 м; LCD = 0,15 м; LED = 0,37 м; La = 0,42 м; Lb = 0,80 м; Lc = 0,50 м; Ld = 0,35 м; m = 8 мм; α = 195°; nвщ = 450 об/мин; nвд = 320 об/мин.
|
|||||||||||||||
|
|
|
|
|
|
Курсовая работа по ТММ |
Лист |
|||||||||
|
|
|
|
|
|
3 |
||||||||||
|
Изм. |
Лист |
№ докум. |
Подпись |
Дата |
|||||||||||
|
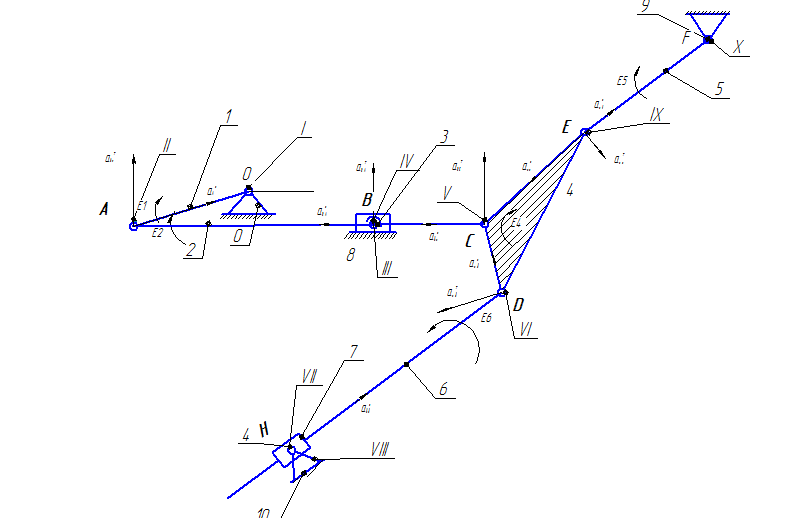
1. Структурное исследование плоского механизма
Структурная схема заданного механизма представлена на рисунке 1.
Рис. 1
Выполним анализ кинематических пар (табл. 1). Для каждой пары определим какими звеньями она образована; какие относительные движения звеньев ее образующих; ее класс; высшая или низшая; наименование пары
|
||||||
|
|
|
|
|
|
Курсовая работа по ТММ |
Лист |
|
|
|
|
|
|
4 |
|
|
Изм. |
Лист |
№ докум. |
Подпись |
Дата |
||

|
ТАБЛТЦА 1: ОСНОВНЫЕ ВИДЫ ЗВЕНЬЕВ МЕХАНИЗМА
2 Анализ Кинематических пар Таблица 2: Анализ кинематических пар
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
Курсовая работа по ТММ |
Лист |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
5 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Изм. |
Лист |
№ докум. |
Подпись |
Дата |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
) W=3n-2p=3*7-2*10=1 P2 – число кинематических пар II класса, P1 – число кинематических пар I класса. Разделим механизм на структурные группы Ассура и первичный механизм (табл. 2; рис. 2).
4) Первичный
механизм
Гр 0
Гр 1
Гр 2
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
Курсовая работа по ТММ |
Лист |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
6 |
||||||||||||||||||||||||||||||||||||
|
Изм. |
Лист |
№ докум. |
Подпись |
Дата |
|||||||||||||||||||||||||||||||||||||





 w0=3*1-2*1=1
w1=3*2-2*3=0
w2=3*2-2*3=0
w0=3*1-2*1=1
w1=3*2-2*3=0
w2=3*2-2*3=0
|
Гр3
Данный механизм является рациональным у него нет избыточных связей. Унего : 7 подвизных звеньев и 3 неподвижные
II. Кинематическое анализ плоского механизма 2.1 План положений Для построения кинематической схемы исследуемого механизма выбираем масштаб длин 𝛍i:
По
горизонтали:
|
||||||
|
|
|
|
|
|
Курсовая работа по ТММ |
Лист |
|
|
|
|
|
|
7 |
|
|
Изм. |
Лист |
№ докум. |
Подпись |
Дата |
||
 w3=3*2-2*3=0
w=w0+w1+w2+w3=1+0+0+0=1
Рис.
2.
w3=3*2-2*3=0
w=w0+w1+w2+w3=1+0+0+0=1
Рис.
2.
|
Строим механизм в заданном положении. 2.2. План скоростей механизма
|
||||||
|
|
|
|
|
|
Курсовая работа по ТММ |
Лист |
|
|
|
|
|
|
8 |
|
|
Изм. |
Лист |
№ докум. |
Подпись |
Дата |
||

|
Механизм 1 класса – кривошип ОА связан со стойкой вращательной парой и совершает равномерное вращение вокруг центра О – угловая скорость кривошипа ОА определяется через частоту вращения n [об/мин] по формуле: ω1 = πn/30 = 3,14·320/30 = 3,5 рад/с. Скорость точки А1 начального звена: VA1 = VA2 = ω1 · lOA = 3,5 · 0,15 = 0,525 м/с Направлен вектор VA1 перпендикулярно ОА в сторону угловой скорости ω1. Выбираем 𝛍v – масштаб построения плана скоростей. Пусть
вектору скорости
Тогда масштаб построения плана скоростей: 𝛍v
= ра1
/VA1
= 0,525 /50= 0,0105
Строим план скоростей. Отложим
от полюса р отрезок ра1
в направлении скорости
Снимем с плана скоростей отрезок : ва=62 мм, рв=19мм; Замеряем, отрезки на плане скоростей и вычисляем модули скоростей:
АС=АВ+ВС=0,58+0,23=0,81м/с
|
||||||
|
|
|
|
|
|
Курсовая работа по ТММ |
Лист |
|
|
|
|
|
|
9 |
|
|
Изм. |
Лист |
№ докум. |
Подпись |
Дата |
||
|
Рассмотрим
зв 4.
Скорость точки Е получается
построение из полюса Е и стойки 9:
Снимем с плана скоростей отрезок :pe=368,8мм ce=338,8мм
Звено5 определяем
скорость точки D
с помощью полюса Е и полюса С
Снимем с плана
скоростей: ed=377,3мм
cd=154,7мм
Звено 6 точку Н мы определяем через полюс D и стойку 10
Снимем с плана скоростей: hd=24мм ph=219 мм
|
||||||
|
|
|
|
|
|
Курсовая работа по ТММ |
Лист |
|
|
|
|
|
|
10 |
|
|
Изм. |
Лист |
№ докум. |
Подпись |
Дата |
||
|
2.3. План ускорений механизма
Звено1Механизм
1 класса – кривошип ОА связан со стойкой
вращательной парой и равномерно
вращается вокруг центра О.
Принимаем:
Выбираем
масштаб ускорений 𝛍а
– масштаб построения плана ускорений.
Пусть вектору ускорения
𝛍=
Звено2 Рычаговый
кривошип
Модули:
|
||||||
|
|
|
|
|
|
Курсовая работа по ТММ |
Лист |
|
|
|
|
|
|
11 |
|
|
Изм. |
Лист |
№ докум. |
Подпись |
Дата |
||