

Федеральное агентство морского и речного транспорта
Федеральное государственное образовательное учреждение
высшего профессионального образования
Волжская государственная академия водного транспорта
Кафедра информатики, систем управления
и телекоммуникаций
А.В.Преображенский
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Задания на выполнение курсовых работ для студентов очного и заочного обучения по специальности «Эксплуатация судового электрооборудования и средств автоматики»
Нижний Новгород
Издательство ФГОУ ВПО «ВГАВТ»
2010
УДК 681.5
Преображенский А.В.
Теория автоматического управления. Задания на выполнение курсовых работ/ А.В.Преображенский. - Н.Новгород: Изд-во ФГОУ ВПО «ВГАВТ», 2010. - 35 с.
Приведены задания и методические указания по выполнению курсовой работы по теории автоматического управления для студентов очного и заочного обучения по специальности «Эксплуатация судового электрооборудования и средств автоматики».
Компьютерное моделирование динамики системы автоматического регулирования, предусмотренное в заданиях для студентов очного обучения, можно провести в лаборатории автоматики, используя пакет Matlab - Simulink.
Рекомендовано к изданию кафедрой информатики, систем управления и телекоммуникаций (протокол № 4 от 4.03. 2010 г.)
Введение
Курсовая работа выполняется по индивидуальному заданию, отличающемуся видом рассматриваемой системы и численными значениями ее параметров. Номер задания определяется по двум последним цифрам номера зачетной книжки.
В работе предлагается рассмотреть линейную математическую модель системы регулирования, представленную в виде структурной схемы, и оценить параметры регулятора, обеспечивающего удовлетворительное качество управления. Предполагается, что студент знаком с основными понятиями теории автоматического управления. Напомним некоторые из них.
Структурная схема представляет систему регулирования в виде соединения элементов, описываемых передаточными функциями. Передаточная функция – это оператор преобразования входной величины элемента (или системы) в выходную величину. Для получения передаточной функции дифференциальное уравнение, описывающее динамику элемента, представляют в операторной форме, сделав замену d/dt = p:
обычная форма уравнения операторная форма
|
|
(1) |
где y - выходная величина, х1 и х2 – входные величины. Затем, выразив из (1) выходную величину «y», записывают уравнение в «нормализованной» операторной форме:
|
|
(2) |
где W1 и W2 – передаточные функции, определяющие зависимость выходной величины y от каждой входной величины (х1, х2) по отдельности. Уравнению (2) соответствует структурная схема элемента, показанная на рис.1. Соединяя соответствующие входы и выходы элементов, получают структурную схему всей системы.

В системах регулирования, работающих по принципу управления по отклонению, элементы системы образуют замкнутый контур. Любая переменная в контуре может рассматриваться и как входная, и как выходная величина. Пример структурной схемы приведен на рис.2.
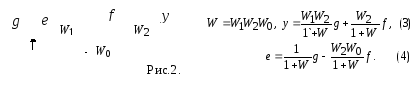
Формулы (3, 4) устанавливают зависимость регулируемой переменной (y) и ошибки регулирования (e) от задающего (g) и возмущающего (f) воздействий. Эти формулы составляются по следующему правилу. Передаточная функция «замкнутой» системы с отрицательной обратной связью, устанавливающая зависимость «выходной» величины от «входной» величины, есть дробь, числитель которой – произведение передаточных функций звеньев, составляющих цепь от «входа» до «выхода» по направлению передачи сигнала, знаменатель – единица плюс передаточная функция разомкнутой системы. Передаточной функцией разомкнутой системы называют произведение передаточных функций всех звеньев, составляющих контур управления, включая звено обратной связи. В рассматриваемом примере это функция W = W1W2W0.
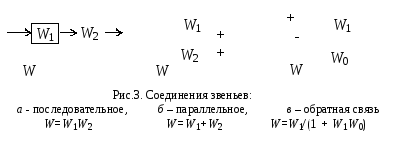
При преобразованиях структурной схемы используют правила, показанные на рис.3.
В общем случае динамика линейной системы описывается дифференциальным уравнением в обычной (5) или операторной (6) форме:
|
|
(5)
(6) |

где x(t) y(t) – отклонения входной и выходной величин от их номинальных значений, соответствующих состоянию равновесия системы. Уравнению (6) соответствует передаточная функция
|
|
(7) |

При отсутствии внешних воздействий (х = 0) и ненулевых начальных условиях в системе происходит «собственное» движение, являющееся решением дифференциального уравнения
|
|
(8) |
Первым требованием к системе регулирования является ее устойчивость, т.е. способность возвращаться в состояние равновесия после снятия внешних воздействий. В устойчивой системе собственное движение затухающее, колебательное или апериодическое. Вид собственного движения зависит от корней характеристического уравнения (9):
|
|
(9) |
Система устойчива, если все действительные корни уравнения (9) отрицательны, а все комплексные корни имеют отрицательные действительные части. При комплексных корнях собственное движение имеет колебательную составляющую.
Динамика системы, показанной на рис. 2, описывается уравнением (3), которое можно представить в форме (10):
|
|
(10) |
Уравнение собственного движения
|
|
(11) |
Т.к. передаточная функция является отношением многочленов относительно р: W(p)=K(p)/D(p), то характеристическое уравнение 1+W(p) = 0 эквивалентно уравнению D(p)+K(p) = 0. Следовательно, характеристическое уравнение замкнутой системы можно получить, приравняв к 0 сумму числителя и знаменателя передаточной функции разомкнутой системы.
Устойчивость системы можно исследовать, используя критерий Рауса-Гурвица. Согласно этому критерию, система устойчива, если все коэффициенты характеристического уравнения (9) строго положительны (нулевые коэффициенты не допустимы) и выполняются следующие условия:
|
- для системы третьего порядка |
a1a2 – a0a3 > 0 , |
(12) |
|
- для системы четвертого порядка |
a3(a1a2 – a0a3) – a4a12 > 0 |
(13) |
(системы более высокого порядка при выполнении курсовой работы не рассматриваются).
В качестве примера получим условие устойчивости системы, показанной на рис.4. Характеристическое уравнение


Условие устойчивости
![]() Неравенство
(14) определяет границу устойчивости по
параметру k.
Для того, чтобы качество регулирования
было высоким, необходим «запас»
устойчивости: параметры системы должны
выбираться достаточно далеко от границы
устойчивости.
Неравенство
(14) определяет границу устойчивости по
параметру k.
Для того, чтобы качество регулирования
было высоким, необходим «запас»
устойчивости: параметры системы должны
выбираться достаточно далеко от границы
устойчивости.
Качество регулирования оценивают по виду переходной характеристики: реакции системы на ступенчатое входное воздействие, задающее (g) и возмущающее (f). По этой характеристике определяют длительность переходного процесса (tp), перерегулирование (σ), или максимальную динамическую ошибку (δ), статическую ошибку (εст) – см. рис. 5.
К ачество
регулирования можно оценить теоретически
по корням характеристического уравнения.
Грубую оценку качества можно получить,
пренебрегая малыми постоянными времени
инерционных элементов системы и уменьшив
порядок характеристического уравнения
до второго. В системе, показанной на
рис. 4, такое упрощение возможно, еслиT1<<T.
При T1
= 0, получим характеристическое уравнение
ачество
регулирования можно оценить теоретически
по корням характеристического уравнения.
Грубую оценку качества можно получить,
пренебрегая малыми постоянными времени
инерционных элементов системы и уменьшив
порядок характеристического уравнения
до второго. В системе, показанной на
рис. 4, такое упрощение возможно, еслиT1<<T.
При T1
= 0, получим характеристическое уравнение
![]() Если дискриминант уравнения отрицательный,
корниp1,2
комплексно-сопряженные,
собственное движение
y(t)
колебательное:
Если дискриминант уравнения отрицательный,
корниp1,2
комплексно-сопряженные,
собственное движение
y(t)
колебательное:
![]()
Значения С, φ зависят от начальных условий.
Качество переходного процесса системы второго порядка можно оценить по значениям постоянной времени (Tэ) и коэффициента затухания (ξэ). Их находят, приведя характеристическое уравнение общего вида (15) к эквивалентной стандартной форме характеристического уравнения колебательного звена (16):
|
|
(15) |
|
(16) | |
|
|
| |||
Длительность переходного процесса (при ξэ < 1) tр≈ 3Tэ/ ξэ, период колебаний Ткол≈ 2πТэ, зависимость перерегулирования σ (в процентах) от ξэ приведена в таблице 1.
Т а б л и ц а 1
|
|
0,05 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
|
,% |
85 |
72 |
52 |
37 |
25 |
16 |
9,5 |
4,6 |
1,5 |
0,2 |
Чтобы определить статическую ошибку системы регулирования, записывают передаточную функцию, устанавливающую зависимость ошибки (е) от внешнего воздействия, задающего (g) или возмущающего (f), см. рис.2, и делают подстановку р = 0.