

Бурда Е.М., Устюгов Н.А.
Лекции по курсу «Судовые автоматизированные электроприводы» предназначены для студентов очной и заочной формы обучения по специальности 180407.65
Дисциплина «Судовые автоматизированные электроприводы» является профилирующей для инженеров-электромехаников плавсостава. В данной дисциплине электроприводы изучаются как объекты автоматического регулирования и управления в органической связи с рабочим механизмом. В начале изучения каждой группы приемников электрической энергии рассматриваются конструктивные особенности, основные рабочие характеристики исполнительного механизма и его реальные эксплуатационные режимы, а затем определяется электропривод с соответствующей системой управления, обеспечивающей оптимальные возможности использования рабочего механизма. При этом особое внимание будет обращено на способы и методы расчета нагрузочных характеристик механизмов, приведения их к «валу» электродвигателя, на изучение взаимосвязи нагрузочных и механических характеристик электроприводов, на соответствие механизма и его электропривода требованиям руководящих документов, в частности, Правилам Российского Речного Регистра.
Введение.
Начало электрификации судов было положено русским академиком Якоби Б.С., который в 1838 году создал первое в мире судно с гребной электрической установкой постоянного тока. Во второй половине XIX века были электрифицированы механизмы машинного отделения, общесудовые вентиляторы, а затем палубные и грузоподъемные механизмы. Все судовые электрические установки того времени работали на постоянном токе при напряжении, как правило, не превышающем 110В. С 1908г. на судах отечественного флота начали применять двигатели переменного тока как наиболее простые и надежные, что в судовых условиях имеет особое значение. До середины XX века происходила электрификация всех судовых механизмов и совершенствовались системы управления, в основном на базе релейно-контакторной автоматики.
В период с 1950 по 1970 г. осуществлялся переход к использованию на судах электроэнергии переменного тока. Важную роль в этом сыграло внедрение многоскоростных асинхронных двигателей. Современные суда содержат большое количество электрифицированных механизмов либо в виде автоматизированных комплексов, либо в виде самостоятельных систем, обеспечивающих функционирование судна в соответствии с его назначением.
Согласно действующего ГОСТа, электроприводом называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение исполнительных органов рабочей машины и управления этим движением.
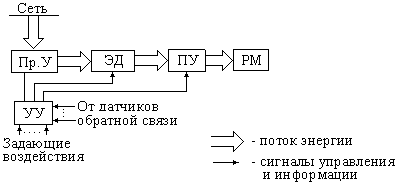
Пр.У. – преобразовательное устройство – преобразует ток и напряжение источника энергии в ток и напряжение, необходимые для работы ЭД.
П.У. – передаточное устройство – содержит механические передачи и соединительные муфты.
У.У. – управляющее устройство представляет собой информационную часть системы управления для обработки сигналов задающих воздействий и состояния системы по датчикам обратной связи и выработки на их основе сигналов управления преобразователем, ЭД и передаточным устройством.
Схема судового электропривода в значительной степени определяется назначением привода и принятой на судне степени автоматизации. В простейшем случае преобразующее устройство отсутствует, передаточное устройство – муфта, управляющее устройство осуществляет пуск, остановку и защиту ЭД.
По степени автоматизации судовые приводы принято разделять на неавтоматизированные, автоматизированные и автоматические.
Наиболее простыми являются неавтоматизированные электроприводы. Это приводы, которые требуют участия обслуживающего персонала как в выработке начального управляющего воздействия, так и в процессе последующей работы электропривода. В автоматизированном электроприводе обслуживающий персонал участвует только в выработке начального управляющего сигнала. Автоматический электропривод – это когда обслуживающий персонал участвует только в надзоре за электромеханической системой. Ручное управление здесь предусматривается при особых режимах работы судна и его энергетической установки. По назначению судовые электроприводы наиболее целесообразно разделить на:
- рулевые электроприводы;
- электроприводы якорных и швартовых механизмов;
- электроприводы судовых грузоподъемных механизмов (кранов, лифтов, грузовых, шлюпочных лебедок и т.п.);
- электроприводы судовых нагнетателей (насосов, вентиляторов, компрессоров);
- электроприводы механизмов специального назначения (подруливающих устройств, автоматических буксирных лебедок и т.д.).
По роду тока судовой электропривод бывает постоянного и переменного тока.
В зависимости от длительности и характера работы электроприводов различают три основных режима работы.
Длительный, когда рабочий период настолько велик, что температура всех частей электродвигателя при неизменной температуре окружающей среды достигает установившихся значений. Нагрузка может быть переменной и постоянной. В этом режиме работает большинство судовых насосов и вентиляторов, гребные электродвигатели.
Кратковременный, когда рабочий период незначителен, вследствие чего температура частей электродвигателя не достигает установившихся значений температуры, а пауза в работе настолько велика, что все части двигателя охлаждаются до температуры окружающей среды. Во время рабочего периода нагрузка может быть постоянной и переменной. Промышленность выпускает ЭД, специально рассчитанные для кратковременных режимов работы. В каталогах эти двигатели приводятся для стандартных длительностей работы 15, 30 и 60 минут. В этом режиме работают электроприводы брашпилей, шпилей, шлюпочных и траловых лебедок, насосов гидрофоров и расходных цистерн.
Повторно-кратковременный режим работы - циклический режим, при котором за время работы части двигателя не успевают нагреваться до установившихся значений температуры, а за время паузы не успевают охладиться до температуры окружающей среды. Согласно ГОСТу общая продолжительность одного рабочего цикла не должна превышать 10 минут, в противном случае режим работы относится к длительному режиму с переменной нагрузкой. Период работы при повторно-кратковременном режиме могут соответствовать как постоянная, так и переменная нагрузки. Повторно-кратковременный режим работы характеризуется продолжительностью включения (ПВ %), равной отношению времени работы к общей продолжительности цикла, включая и время паузы t0.
![]()
Приняты стандартные продолжительности включения ПВ%: 15, 25, 40 и 60%. При ПВ% > 60% режим работы рассматривается как длительный с переменной нагрузкой. В повторно-кратковременном режиме работают электроприводы кранов, лифтов.
Судовые электродвигатели и аппараты управления ими в целях защиты от воздействия окружающей среды и особых условий эксплуатации должны быть соответствующего конструктивного изготовления. Конструктивное исполнение ЭД определяется: характером защиты от воздействия окружающей среды, способом охлаждения его частей; расположением вала и способом монтажа.
Для обозначения степени защиты применяются латинские буквы IP (International Protection) и следующие за ними 2 цифры. Первая обозначает степень защиты персонала от соприкосновения с находящимися под напряжением и вращающимися частями, а также от попадания внутрь машины твердых посторонних тел.
О - защита отсутствует
2 - от проникновения внутрь пальцев (l > 80мм, Ø > 12мм)
4 - от проникновения проволоки и твердых тел > 1мм
5 - от пыли.
Вторая - от попадания воды.
0 - защита отсутствует
2 - защита от капель при наклоне Ø 150
3 - от дождя
4 - от брызг
5 - от водяных струй.
6 - от волн воды
8- при длительном погружении в воду.
Электродвигатели и аппаратура исполнения IP00 устанавливается только в специальных запираемых помещениях, куда исключается попадание воды.
В жилых и общественных помещениях IP23 и IР 44.
В румпельных, кофердамах, ниже настила МО –IР 44.
На верхних палубах – IР 56.
Другие конструктивные особенности рассматривались в курсе «Электрические машины».
Глава I. Электроприводы судовых нагнетателей.
1.Общая характеристика и классификация нагнетателей.
К судовым нагнетателям относятся: насосы, вентиляторы, компрессоры. Электроприводы нагнетателей являются основными потребителями электроэнергии. На их долю приходится около50 % вырабатываемой электроэнергии судовой электростанции. Нагнетатели обеспечивают работу энергетической установки судна и общесудовых систем. Эти механизмы имеют весьма ответственное назначение и обеспечивают: движение судна, безопасность мореплавания, сохранность перевозимых грузов, улучшение обитаемости и бытовых условий экипажа судна.
Насосами называются машины, предназначенные для перемещения жидкостей; вентиляторами и компрессорами – машины для перемещения воздуха или газов.
По принципу действия нагнетатели подразделяются на динамические и объемные.
В динамических нагнетателях рабочая среда приобретает энергию преимущественно в кинетической форме.
К ним относятся лопастные нагнетатели (центробежные и осевые) и нагнетатели трения (вихревые, черпаковые, дисковые, вибрационные).
Объемные (гидростатические) нагнетатели действуют по принципу вытеснения.
Группу объемных насосов составляют возвратно-поступательные (поршневые, диафрагменные) и роторные с вращательным движением вытеснителей (шестеренные, винтовые) и с вращательно-поступательным движением ( роторно-пластинчатые и роторно-поршневые).
По роду перекачиваемой среды насосы разделяются на: водяные забортной и пресной воды, питьевой и мытьевой, холодной и горячей воды; топливные и масляные; вентиляторы бывают- воздушные, дымовые, газовые, хладагента.
По назначению нагнетатели делятся на две основные группы: судовых энергетических установок и общесудовых систем.
К нагнетателям судовых энергетических установок относятся насосы: топливные, масляные, циркуляционные, конденсатные, охлаждающие, питательные и другие; вентиляторы: машинные, котельные, охлаждающие и т.д..
К нагнетателям общесудовых систем относятся насосы пожарные, балластные, трюмные, санитарные, грузовые и вентиляторы: трюмные, каютные и др.
2. Основные параметры работы нагнетателей.
К основным техническим показателям нагнетателей относятся: подача, давление (напор), мощность, КПД, вакуумметрическая высота всасывания и частота вращения.
Подача - количество жидкости или газа, подаваемое через сечение выходного патрубка нагнетателя в единицу времени. Для измерения подачи пользуются объемными значениями Q [м3/с] и массовыми Q м [кг/с].
Они
связаны отношением
![]()
где
![]() - плотность рабочей среды, кг/м3.
- плотность рабочей среды, кг/м3.
Напор (Н) – энергия, сообщаемая нагнетателем единице массы перекачиваемой жидкости или газа.
Для насосов объемного принципа действия в качестве основного параметра обычно указывается не напор, а создаваемое ими полное давление.
Напор и давление связаны отношением
![]() [
[![]() ]
]
Для вентиляторов часто напор указывают в мм .вод. столба – h.
1 мм. вод. ст. = 9,81 Па
1 атм. = 10 м. вод. ст. 100 кПа (98067 Па).
Мощность и К.П.Д.
Энергия, подводимая к нагнетателю от двигателя в единицу времени, представляет его мощность
Часть энергии теряется в нагнетателе в виде потерь и определяет его К.П.Д. - наг.
Другая часть энергии, передаваемая рабочей среде в единицу времени определяет полезную мощность нагнетателя, которая пропорциональна давлению и подаче.
![]() [кВт],
[кВт],
Под КПД понимают отношение полезной мощности к затраченной.
![]()
Его можно представить в виде произведения трех к.п.д.
Г - гидравлического КПД, которое характеризует потери мощности на преодоление гидравлических сопротивлений в нагнетателе;
0 - объемного КПД, обусловленного утечками рабочей среды внутри нагнетателя;
мех - механического КПД - от потерь на трение в нагнетателе.
Частота вращения – n [об/мин]
Выбор частоты вращения нагнетателя зависит от таких условий, как тип нагнетателя, ограничения по массам и габаритам, требования в отношении экономичности.
Номинальная частота вращения указывается в паспорте нагнетателя.
Мощность вращательного движения определяется моментом и угловой скоростью (с-1) - .
![]() [кВт]
[кВт]
Угловая
скорость ω
и частота вращения n
связаны отношением
![]() [
[![]() - число оборотов в секунду в разных
мерах]
- число оборотов в секунду в разных
мерах]
Отсюда
![]() [кВт]
[кВт]
Вакуумметрическая высота всасывания (Нв ).
Для некоторых судовых насосов является важным параметром.
Под
вакуумметрической высотой всасывания
понимают разность между атмосферным
давлением
![]() и давлением
и давлением![]() - на входе в насос, т.е.
- на входе в насос, т.е.
![]()
Высота
всасывания ограничивается минимальным
абсолютным давлением
![]() min,
возникающим в области входа в насос,
которое должно быть больше давления
насыщения пара
min,
возникающим в области входа в насос,
которое должно быть больше давления
насыщения пара
![]() перекачиваемой жидкости
перекачиваемой жидкости
![]() min
>
min
>![]()
В противном случае жидкость в местах возникновения минимального давления вскипает и нормальная работа насоса нарушается.
Мощность насосов, обладающих способностью к всасыванию определяется суммарным напором H = Hнаг ± Нв