

Виды аналитического счисления и их применение в судовождении. Основные формулы и таблицы, используемые при расчетах.
Аналитическим или письменным счислением называется вычисление координат судна по сделанным разностям широт и разностям долгот или вычисление курса и расстояния по координатам точек отхода и прихода. Оно применяется при плавании в океанах вдали от берегов, при решении астрономических задач для определения счислимых координат.
Основные формулы:
![]()
Значения РШ и РД рассчитываются по известным элементам движения – курсу К и пройденному расстоянию S.
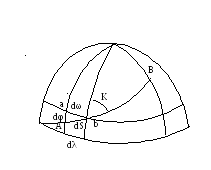
![]()
По этим формулам составлена табл.24 МТ-75. Значение РД выбирается из табл. 25а МТ-75. При больших плаваниях, а также в высоких широтах следует пользоваться более точной формулой: РД = ОТШ (РМЧ: РШ) где – РМЧ - разность меридиональных частей, выбираемая из табл. 26 МТ-75
Виды аналитического счисления.
АС – может быть простым (плавание одним курсом), составное – плавание разными курсами, сложным. При частой смене курса следует учитывать циркуляцию по аргументам; промежуточный истинный курс и плавание по нему. Формулы АС применяются при расчете расстояния S между 2мя точками и для нахождения локсодромического направления из одной на другую:
tg K = ОТШ : РШ = РД : РМЧ, S = РШ sec K = ОТШ cosec K.
Формулы АС (письменного) позволяют решать и обратную задачу: определить курс и расстояние между двумя точками по их известным координатам.
Аналитическое счисление, его назначение сущность, случаи применения. Формулы. Точность рассчитанных координат.
АС – ведется в открытом море, при решении астрономических задач, во время ледового плавания, если приходится использовать мелкомасштабные карты. Сущность АС (или письменного счисления) заключается в том, что с помощью формул вычисляют разность широт и долгот и по ним определяют координаты пункта прихода судна по известным координатам пункта отхода: φ2 = φ1 + РШ; λ2 = λ1 + РД. где – РШ = S cos K; РД = ОТШ sec φср; ОТШ = S sin K. По этим формулам составлена табл.24 МТ-75. Значение РД выбирается из табл. 25а МТ-75. При больших плаваниях, а также в высоких широтах следует пользоваться более точной формулой: РД = ОТШ (РМЧ: РШ) где – РМЧ - разность меридиональных частей, выбираемая из табл. 26 МТ-75. АС – может быть простым (плавание одним курсом), составное – плавание разными курсами, сложным. При частой смене курса следует учитывать циркуляцию по аргументам; промежуточный истинный курс и плавание по нему. Формулы АС применяются при расчете расстояния S между 2мя точками и для нахождения локсодромического направления из одной на другую:
tg K = ОТШ : РШ = РД : РМЧ, S = РШ sec K = ОТШ cosec K.
Формулы АС (письменного) позволяют решать и обратную задачу: определить курс и расстояние между двумя точками по их известным координатам.
Корректурные документы и их назначение. Система доведения радиолокационной информации до мореплавателей (ВСНП, НАВИП, ПРИП, НАВТЕКС).
Карты и навигационные пособия исправляются на кораблях по материалам, называемым корректурными документами. К ним относятся:
Навигационные радиоизвещения.
Извещения мореплавателям, издаваемые-Гидрографическим
управлением ВМС и подразделениями Гидрографии.
Дополнения к лоции.
Дополнения к книгам «Огни и знаки».
Дополнения к радиомаякам.
Дополнения к каталогу карт и книг.
Все эти материалы, выпускаемые после изданий и корректуры карт и пособий, служат для приведения имеющихся карт и пособий к уровню современности, для того чтобы все написанное на карте и в пособиях соответствовало обстановке на местности во время плавания
Навигационные радиоизвещения
В радиоизвещениях даются сведения срочного характера, необходимые до получения типографских извещений. К таким сведениям относятся: извещения о временном снятии маяков, закрытие некоторых районов для плавания, обнаружение опасностей (мин, банок, затонувших судов) и т. п.
Радиоизвещения повторяются в Извещениях мореплавателям, если к моменту выпуска извещений не произошло изменений.
Исправления по радиоизвещениям считаются временными и делаются простым карандашом на картах и в пособиях.
Извещения мореплавателям подразделений Гидрографии ВМС
Извещения мореплавателям являются основными документами для исправления карт и пособий. Издаются они по мере поступления полезных для мореплавателей материалов.
По этим Извещениям штурман обязан делать исправления красными чернилами (тушью) «а карте и в пособиях, считая их основными исправлениями.
Извещения мореплавателям Гидрографического управления ВМС служат для контроля исправлений по Извещениям мореплавателям подразделений Гидрографии ВМС. (По всем театрам и по иностранным водам).
Извещения мореплавателям гидрографического управления ВМС
Гидрографическое управление ВМС выпускает еженедельно важные для штурманов Извещения мореплавателям «а основании полученных извещений мореплавателям подразделений Гидрографии ВМС, материалов Гидрографического управления Главсевморпути и других документов, поступающих в Гидрографическое управление ВМС для корректуры карт и пособий.
КОРРЕКТУРА КАРТ И КНИГ НА КОРАБЛЕ
Все исправления карт и книг на кораблях штурманы обязаны производить немедленно по полученным Извещениям мореплавателям подразделений Гидрографии ВМС и по другим корректурным документам. Исправлять карты и пособия надо, начиная с последнего номера Извещения, так как часто последующие Извещения мореплавателям аннулируют собой предыдущие (например, сначала было объявлено о снятии вехи, а затем о восстановлении).
Если при приеме дел штурмана окажется, что корректура карт долгое время не проводилась или исполнялась несистематически, необходимо:
Записать карты в корректурный журнал.
Перед корректурой каждой карты проверить, не была ли корректура этой карты выполнена раньше и не заменена ли она новым изданием карты.
Произвести корректуру каждой карты за весь отрезок времени между датой произведенной на ней последней корректуры и днем плавания.
Помнить, что в местах снабжения картами имеются Извещения мореплавателям за все предыдущее время и корректурные экземпляры карт, на которых нанесены все исправления по день вы
пуска новейшего Извещения мореплавателям.
Информация по безопасности на море включает навигационные и метеорологические предупреждения, метеорологические прогнозы и срочные сообщения, относящиеся к безопасности. Эта информация является жизненно важной для всех судов, поэтому она является обязательной для приема на всех судах в независимости от района плавания. Информация по поиску и спасанию обеспечивается властями, ответственными за координацию поисково-спасательных операций на море (МКСС), в соответствии со стандартами я установленными Международной морской организацией (ИМО). Всемирная служба навигационных предупреждений является международной координированной службой для распространения навигационных предупреждений (Резолюция ИМО А 706(17)). В ВСНП весь мировой океан разделен на 16 морских районов, называемых НАВАРЕА и обозначаемых римскими цифрами. В каждом из районов имеется Страна координатор, ответственная за сбор, анализ и передачу навигационной информации.
НАВТЕКС - международная автоматизированная система передачи в режиме узкополосного буквопечатания навигационной, метеорологической и другой срочной информации, относящейся к прибрежным водам в радиусе до 400 миль от берега. В отличие от предупреждений НАВАРЕА, НАВТЕКС обеспечивает передачу метеорологических прогнозов и всех штормовых предупреждений. НАВТЕКС (навигационный телекс) - это международная автоматизированная система передачи
Данные об изменениях навигационной обстановки, которые необходимо срочно довести до сведения море-плавателей передаются по радио. В последующем эти сведения дублируются в печатных ИМ, если к моменту выпуска последних изменений не произошло. По своему характеру и срокам передачи навигационные предупреждения подразделяются на внеочередные оповещения об опасностях для мореплавания и передачи по расписанию. Внеочередные оповещения и передачи по расписанию осуществляются по радио в рамках Всемирной службы радионавигационных предупреждений (ВСРНП), предназначенной для координирования таких передач, В рамках ВСРНП передаются три вида навигационных предупреждений - районные, прибрежные и мест-ные. 1. Для координирования радиопередачи районных предупреждений весь Мировой океан разделен на 16 гео-графических районов .Установление границ районов не имеет отношения к границам между государствами и не должно ставить их под сомнение. Там, где необходимо, для сокращения обозначения района используется тер-мин НАВАРЕА (NAVAREA) с последующей римской цифрой, указывающей номер района. В каждом из районов выделен районный координатор - орган в обязанности которого входит подбор ин-формации, объявление предупреждений и бюллетеней (перечень номеров ранее объявленных и действующих предупреждений) на свой район. Таким образом, районный координатор - это страна, осуществляющая сбор, анализ и передачу по радио навигационной информации относящейся к району, в виде районных предупрежде-нии НАВАРЕА. Предупреждения HABAPEA (NAVAREA) представляют собой радионавигационные предупреждения дальнего радиуса действия, составленные районным координатором на свои район и переданные через мощную радиостанцию, обеспечивающую прием предупреждений в своем , районе и в прилегающих частях соседних районов. Некоторые районы в виду особо интенсивного судоходства в них делятся на подрайоны, представляющие со-бой часть 1 района в котором несколько стран установили координированную систему для передачи прибреж-ных предупреждений. В каждом из подрайонов выделен координатор подрайона, представляющий собой орган, в обязанности которого входит координация системы навигационных предупреждении в установленном под-районе, т. е. сбор и анализ навигационной информации относящейся к подрайону, и передача такой информа-ции районному координатору для передачи ее по радио через районную радиостанцию. 2. Прибрежные предупреждения (COASTAL WARNINGS) следующая после района (и подрайона) ступень ВСРНП. Некоторые районы (и подрайоны) разбиваются на регионы по числу прибрежных стран. Таким обра-зом, регион - это часть района или подрайона, в котором одно государство приняло на себя ответственность за передачу прибрежных предупреждение (ПРИП). Такое государство объявляют национальным координатором - органом, в обязанности которого входит подбор и объявление прибрежных предупреждений через сеть на-циональных береговых радиостанций, а также немедленную передачу всей соответствующей информации рай-онному координатору или координатору своего подрайона, если таковой имеет место. В этой связи координа-тор подрайона, в который входит более одного национального региона, должен служить центральной инстан-цией для связи национальных координаторов и следующая после района (и подрайона) ступень ВСРНП. Некоторые районы (и подрайоны) разбиваются на регионы по числу прибрежных стран. Таким образом, регион - это часть района или подрайона, в котором одно государство приняло на себя ответственность за передачу прибрежных предупреждение (ПРИП). Такое государство объявляют национальным координатором - органом, в обязанности которого входит подбор и объявление прибрежных предупреждений через сеть национальных береговых радиостанций, а также немед-ленную передачу всей соответствующей информации районному координатору или координатору своего под-района, если таковой имеет место. В этой связи координатор подрайона, в который входит более одного нацио-нального региона, должен служить центральной инстанцией для связи национальных координаторов и также обязан ретранслировать навигационные предупреждения своему районному координатору. Прибрежные предупреждения - это радионавигационные предупреждения, относящиеся к региону или час-ти района, объявляемые национальным координатором через национальные береговые радиостанции. Каждая радиостанция передает ПРИП, относящиеся только к своему подрегиону. Радиостанции подрегионов повторяют ПРИП других подрегионов лишь по указанию национального координатора Наиболее важные ПРИП отбирают для последующей передачи в виде НАВАРЕА., Национальны координатор должен составлять прибрежные предупреждения там, где это необходимо. Кроме этого, он также должен организовать получение предупреждений НАВАРЕА, переданных по радио по району, в который он входит, и включать в свои национальные ИМ те действующие из них, которые относятся к его региону (регионам). Национальные координаторы должны учитывать возможность и желательность получения мореплавателями в порту действующих, предупреждений. З. Местные предупреждения (LOCAL WARNINGS)-предусмотренные ВСРНП предупреждения, относя-щиеся к району, находящемуся в пределах юрисдикции портовых властей. Такие предупреждения не требуют их передачи за пределы района действия. Предупреждения НАВАРЕА. Они служат информацией, которая необходима для обеспечения безопасности мореплавания на дальних (океанских) переходах. В них включается информация, касающаяся повреждений важных СНО, а также информация, которая может потребовать изменения запланированного маршрута пере-хода ниже приводится перечень информации, позволяющий определить общий принцип ее отбора для НАВА-РЕА, но далеко не исчерпывающий всего того, что может составить содержание НАВАРЕА: неисправности огней, туманных сигналов и буев, обеспечивающих плавание по основным судоходным трас-сам; наличие опасных затонувших судов на основных судоходных путях или в непосредственной близости от них и, если имеется, их ограждение; установка нового важного навигационного оборудования или существенные изменения имеющегося, если та-кая установка или изменения могут повлиять на безопасность плавания; наличие больших буксирных караванов в районах стесненного плавания; дрейфующие мины; районы поисково-спасательных работ и районы, в которых проводятся мероприятия по борьбе с загрязнением моря (для обхода этих районов); Наличие вновь обнаруженных скал, мелей, рифов и затонувших судов, которые могут представлять опасность для мореплавания и, если имеется их ограждение; неожиданные изменения или временное запрещение плавания по установленным путям; работа по прокладке подводных кабелей или трубопроводов или другие подводные работы, которые могут представить опасность для мореплавания на судоходных путях или вблизи них; значительные нарушения режима работы радионавигационного оборудования; информация, касающаяся особых действий, которые могут повлиять на безопасность мореплавания в некото-рых случаях в обширных районах, а именно: военно-морские учения, ракетные стрельбы, запуски космиче-ских объектов, ядерные испытания и т. д. Первоначально эта информация должна быть объявлена соответст-вующим районным координатором по возможности не позднее чем за пять дней до начала действий. Эти сооб-щения по мере необходимости должны повторяться до завершения действий.
Классификация, назначение и использование морских карт. Навигационная карта. Навигационные руководства и пособия для плавания.
Морские карты различаются по своему назначению, экваториальной принадлежности, по масштабам, проекциям и другим признакам. Однако все морские карты можно разделить на два основных типа: навигационные и вспомогательные, справочные.
Справочные и вспомогательные карты включают карты различного содержания и назначения. Состав этой группы карт из-за многих причин не остается постоянным и время от времени меняется. Наиболее важными из справочны х карт являются карты рекомендованных путей, гидрометеорологических элементов (течения, приливы, льды и т. п.) и грунтов, радиомаяков и радиостанций, звездного неба, часовых поясов и др.
Определенную ценность для мореплавания представляют гидрометеорологические карты, издаваемые для отдельных морей и частей океанов на каждый месяц. На таких картах приведены подробные сведения о течениях, ветрах, волнении и т. п.
Справочные карты, объединенные общностью содержания и назначения, часто сводятся в один общий атлас, например, Атлас приливо-отливных течений; Атлас течений для плавания в шхерах и т. д. Из вспомогательных карт наиболее распространенными являются карты-сетки для участков океанов и отдельных морей (не перекрываемых путевыми картами) без элементов специальной морской обстановки.
Навигационные морские карты предназначены для обеспечения безопасного плавания судна. На них выполняют счисления пути судна и определяют его местонахождение. На таких картах подробно отражены рельеф морского дна, характер берега и вся навигационная обстановка в районе, описываемом данной картой. Выбор масштаба морских навигационных карт обусловлен удалением от берега трасс следования судов. Понятно, что по мере приближения к берегу условия плавания в общем случае усложняются, возможность выбора курсов ограничивается, количество навигационных опасностей увеличивается. Поэтому на такой карте необходимо иметь большую подробность в элементах содержания (большую нагрузку карты), что требует большего масштаба карты. Навигационные морские карты подразделяются на общие и специальные. Общие карты подразделяют на генеральные, путевые, частные карты и планы.
Генеральные (обобщенные) карты предназначены для общего изучения условий плавания в большом водном бассейне, счисления пути судна при плавании в открытом море, предварительной прокладки маршрута предстоящего перехода и общих навигационных расчетов. Такие карты обычно составляют в масштабах от 1:5 000 000 до 1:500 000. На генеральных картах нанесены важнейшие маяки, навигационные опасности, расположенные на значительном удалении от берега, плавучие средства навигационного ограждения, выставленные у опасностей, лежащих вдали от берегов,
Путевые карты предназначены для обеспечения плаваний вдоль побережий на некотором удалении от берегов, а также для обеспечения подходов судна с моря к берегу; составляются в масштабах от 1:500 000 до 1:100 000. На путевых картах нанесены маяки, огни и знаки, обеспечивающие прибрежное плавание, все навигационные опасности, плавучие средства навигационного ограждения.
Частные карты служат для обеспечения плавания в непосредственной близости от берегов, в стесненных навигационных условиях (узкости, проходы, фарватеры и т. п.); составляются в масштабах от 1:75 000 до 1:25 000. Частные карты представляют собой более подробные путевые карты. На них нанесены все маяки, огни и знаки, включая рейдовые и портовые, все навигационные опасности, включая малые банки и камни, все плавучие средства навигационного ограждения.
Планы необходимы для обеспечения входа в порты, гавани, бухты, на рейды и для ориентировки при передвижении в пределах этих акваторий. Планы составляют в масштабах от 1:25 000 до 1:500. На них наносят те же элементы морской обстановки, что и на частные карты. По внешнему виду план отличается от карты тем, что его рамка не разбита на градусы и минуты, а промежуточные меридианы и параллели не приводятся. На практике штурман пользуется для каждого участка моря картой самого крупного масштаба.
Специальные навигационные карты предназначены так же, как и общенавигационные для графического решения задач судовождения и для удовлетворения специальных навигационных и других требований. Они представляют собой обычные навигационные или бланковые карты различных масштабов с нанесенной на них дополнительной нагрузкой содержания. Наиболее распространенные типы специальных карт: радионавигационные карты со специальными стадиметрическими, гиперболическими или азимутальными сетками, предназначенными для определения места судна с помощью радионавигационных систем, и навигационно-промысловые карты с подробной грунтовой характеристикой морского дна, предназначенные для обеспечения лова рыбы.
Информация, содержащаяся на картах, поясняется и дополняется сведениями, помещенными в специальных текстовых и табличных руководствах и пособиях для плавания, издаваемых обычно в виде книг.
Все книги делятся на два вида: общенавигационные и промысловые. Общенавигационные книги включают в себя руководства для плавания, справочные и вычислительные пособия.
лоции - для получения навигационно-гидрографической и гидрометеорологической информации, необходимой для обеспечения безопасности мореплавания;
огни и знаки - для получения сведений о навигационном оборудовании;
радиотехнические средства навигационного оборудования - для выбора сведений о радионавигационных системах, радиомаяках, океанских судах службы погоды и радиопеленгаторных станциях;
расписание передач навигационных и гидрометеорологических сообщений для мореплавателей - для получения информации о радиостанциях, передающих указанные сведения. Расписание факсимильных гидрометеорологических передач включается в состав судовой коллекции при наличии приемной факсимильной аппаратуры;
правила плавания (описания и правила плавания по каналам, фарватерам и внутренним водным путям);
каталоги карт и книг (перечень карт и руководств для плавания, предназначенных для обеспечения общего мореплавания);
астрономические таблицы и пособия: ( Морской астрономический ежегодник (МАЕ); Мореходные таблицы (МТ - 75); Высоты и азимуты светил (ВАС - 58);
гидрометеорологические атласы и таблицы: (атласы течений, климатических данных и гидрометеорологических условий плавания, таблицы приливов и течений);
справочные издания - Океанские пути мира; Международные правила предупреждения столкновения судов в море (МППСС-72), адм. № 9017; Международный свод сигналов (МСС); Описание особенностей судовых огней военных кораблей и сигналов, подаваемых кораблями для обеспечения безопасности плавания, адм. № 9027; Условные знаки для морских карт и карт внутренних водных путей, адм. № 9025; Рекомендации для плавания в районах разделения движения, адм. № 9037;
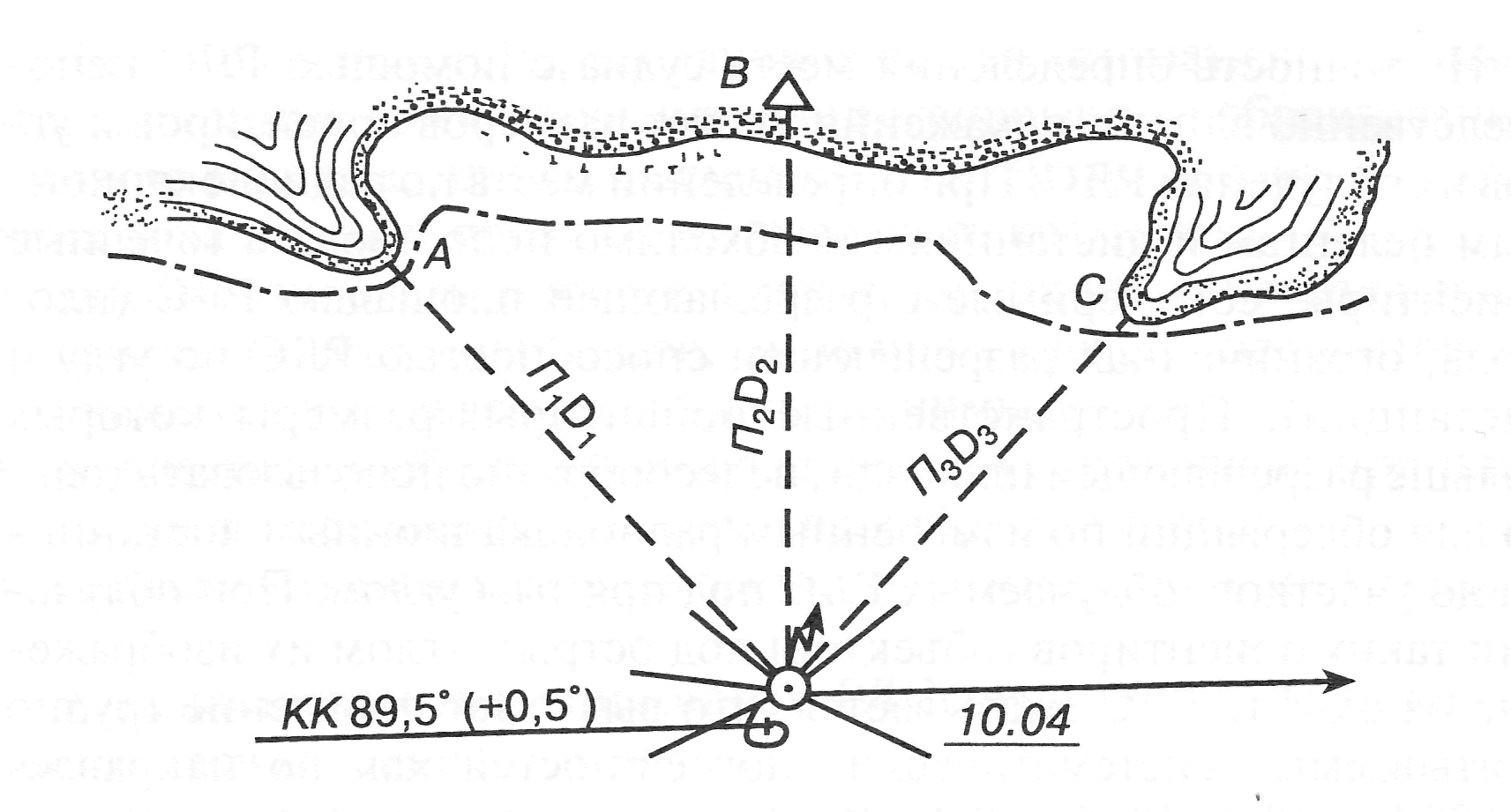
Определение расстояний до ориентира по вертикальному углу измеренному секстаном между вершиной объекта и видимым горизонтом, вершиной объекта и основанием ориентира.
Расстояния в море могут определяться несколькими визуальными методами: с помощью дальномеров, глазомерно, по вертикальному углу. Дальномеры работают на основе различных принципов. Горизонтально-базисные решают треугольник по известной стороне (базе дальномера, которой является труба прибора) и измеряемому горизонтальному углу. Стереоскопические используют свойство человеческого глаза различать глубину пространства. Микрометрические используют известную высоту предмета и противоположный угол. Точность измерения зависит от базы и измеряемого расстояния, ошибки увеличиваются пропорционально квадрату расстояния. На судах торгового флота дальномеры не нашли широкого применения. Здесь используется метод определения расстояния по вертикальному углу, измеренному секстаном.
При этом могут быть 3 варианта:
1. Определение расстояния до ориентира, основание которого расположено ближе видимого горизонта, а сам ориентир находится недалеко от уреза воды ( высота ориентира больше расстояния от него до уреза воды) .
Секстаном измеряется либо угол между основанием и вершиной ориентира, либо угол между вершиной ориентира и урезом воды у береговой черты под ориентиром. Последний вариант применяется чаще всего, так как основание ориентира может быть закрыто растительностью, скалами и т.д.(нераспознаваемо). Однако, следует помнить, что в этом случае при плавании в морях с приливами нужно учитывать уровень воды (вычитать уровень прилива из указанной в навигационных пособиях высоты маяка).
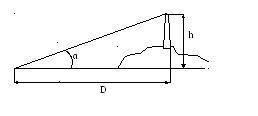
Предположим, что высота ориентира известна, а высота глаза наблюдателя равна нулю. Тогда расстояние до ориентира определится из прямоугольного треугольника по формуле:
![]()
Так
как угол α весьма мал (измеряется
минутами, редко достигая нескольких
градусов с минутами), величину
![]() можно заменить величиной α, при условии,
что угол α взят в радианах. Так как высота
ориентира берётся в метрах, то и дистанцию
до него по этой формуле получаем в
метрах. Для перехода от метров к милям
разделим числитель на 1852, а чтобы перейти
от радианов к минутам (угол секстаном
измеряется в градусах и минутах)
знаменатель разделим на
можно заменить величиной α, при условии,
что угол α взят в радианах. Так как высота
ориентира берётся в метрах, то и дистанцию
до него по этой формуле получаем в
метрах. Для перехода от метров к милям
разделим числитель на 1852, а чтобы перейти
от радианов к минутам (угол секстаном
измеряется в градусах и минутах)
знаменатель разделим на![]() .
.
Высоту маяка можно взять либо с карты (на всех английских картах и на некоторых российских высоты маяков нанесены около них), либо – из пособия «Огни и знаки». В последнем случае приводится как высота ориентира от основания, так и высота от уреза воды.
Рефракция
для основания и вершины маяка приблизительно
одинакова, поэтому не учитывается. Угол
α находится по формуле:
![]() .
.
Влияние высоты глаза наблюдателя на определяемую дистанцию до ориентира.
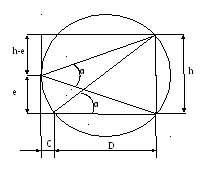
Если глаз наблюдателя находится на некоторой высоте е, то формула для определения дистанции даёт ошибку С. Её величина находится на основе свойства секущих к окружности, вмещающей измеренный вертикальный угол, а также вершину и основание ориентира (урез воды):
![]() .
.
Из
формулы видно, что при
![]() ошибка
в дистанции не превышает высоты глаза
наблюдателя, т.е., составляет всего
несколько метров. Таким образом, в
большинстве случаев она незначительна
и может не учитываться. Если всё-таки
необходимо учесть ошибку, то:
ошибка
в дистанции не превышает высоты глаза
наблюдателя, т.е., составляет всего
несколько метров. Таким образом, в
большинстве случаев она незначительна
и может не учитываться. Если всё-таки
необходимо учесть ошибку, то:
![]()
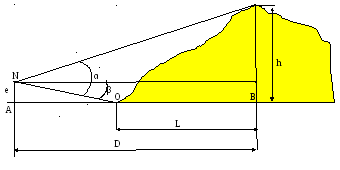
2. Определение расстояния до ориентира, когда урез воды находится ближе видимого горизонта, а основание ориентира удалено от уреза воды на некоторое расстояние L.
В этом случае также секстаном измеряется вертикальный угол между урезом воды и вершиной ориентира. Дистанция от уреза воды до ориентира снимается с карты. Этот способ часто применяется при определении дистанции до вершины горы, нанесённой на карту и обозначенной на ней в качестве ориентира.
В
данном случае:
![]()
![]()
![]() .
.
Естественно, величины L, h и e должны быть в одних и тех же единицах.
3. Определение расстояния до ориентира, когда его основание находится за горизонтом.
Е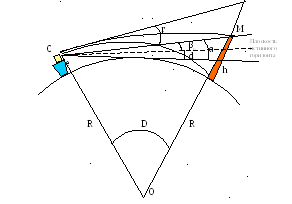
Из-за рефракции направления на видимый горизонт и вершину ориентира определяются касательными к световым лучам, идущим по дуге от глаза наблюдателя к видимому горизонту и вершине ориентира. Тогда для определения расстояния до ориентира в угловой мере из треугольника ОСЕ на основании теоремы синусов:
где
![]()
![]()
![]() -
наклонение видимого горизонта.
-
наклонение видимого горизонта.
По
этой формуле рассчитана таблица 29 в
МТ-75. Для того, чтобы ею воспользоваться,
необходимо по таблице 11-а МТ-75 в зависимости
от высоты глаза или с помощью наклономера
найти наклонение видимого горизонта и
вычесть его абсолютное значение из
измеренного секстаном угла между
направлением на видимый горизонт и
направлением на вершину ориентира. С
полученным углом β0
и разностью
![]() и входят в таблицу.
и входят в таблицу.
В
случае, когда основание ориентира
находится ближе видимого горизонта,
также можно воспользоваться табл. 29. В
этом случае при вычислении
![]() вместо наклонения видимого горизонта
необходимо принимать наклонение
зрительного луча, найденное по таблице
11-б МТ-75. Но, так как наклонение зрительного
луча зависит не только от высоты глаза,
но и от расстояния до объекта, которое
нас в конечном итоге и интересует,
приходится делать несколько приближений.
Для начала при использовании табл. 11-б
берём расстояние от счислимой точки до
ориентира, затем входим в эту таблицу
с расстоянием, найденным по табл. 29, и
так до тех пор, пока последнее не
перестанет меняться.
вместо наклонения видимого горизонта
необходимо принимать наклонение
зрительного луча, найденное по таблице
11-б МТ-75. Но, так как наклонение зрительного
луча зависит не только от высоты глаза,
но и от расстояния до объекта, которое
нас в конечном итоге и интересует,
приходится делать несколько приближений.
Для начала при использовании табл. 11-б
берём расстояние от счислимой точки до
ориентира, затем входим в эту таблицу
с расстоянием, найденным по табл. 29, и
так до тех пор, пока последнее не
перестанет меняться.
Для
того, чтобы определить, что мы видим при
измерении вертикального угла – видимый
горизонт или урез воды, необходимо
воспользоваться формулой для определения
дальности видимого горизонта:
![]() .
Проведя окружность с центром в счислимогом
месте и радиусом, равным
.
Проведя окружность с центром в счислимогом
месте и радиусом, равным![]() ,
смотрим, попадает ли внутрь неё ориентир.
Если попадает – пользуемся формулой
(1) , не попадает – МТ-75.
,
смотрим, попадает ли внутрь неё ориентир.
Если попадает – пользуемся формулой
(1) , не попадает – МТ-75.
Случайные ошибки в определении расстояния до ориентира по вертикальному углу.
Градиент
вертикального угла (см. определение
места судна по двум горизонтальным
углам) равен:
![]() .
.
Тогда, случайная ошибка в полученной дистанции до ориентира из-за ошибки при измерении вертикального угла будет равна:
![]()
Случайная ошибка в полученной дистанции из-за ошибки в высоте ориентира по причине колебаний уровня моря:
![]()
Общая ошибка:
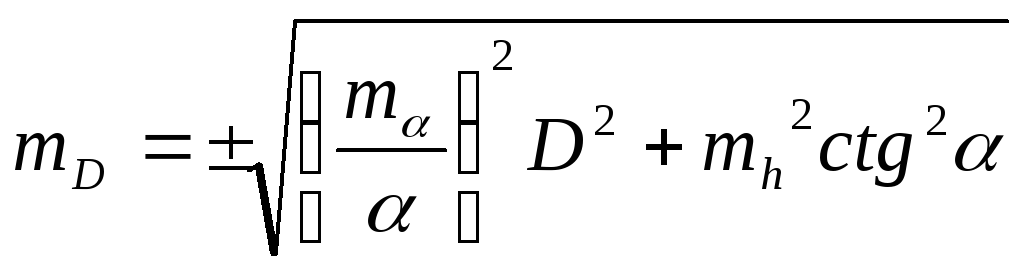
Поскольку
![]() ,
,
Из формулы видно, что выгоднее определять расстояния по более близким предметам с большой высотой.
Определение места судна по двум горизонтальным углам. Достоинства и недостатки способа. Порядок выполнения и оценка погрешности места.
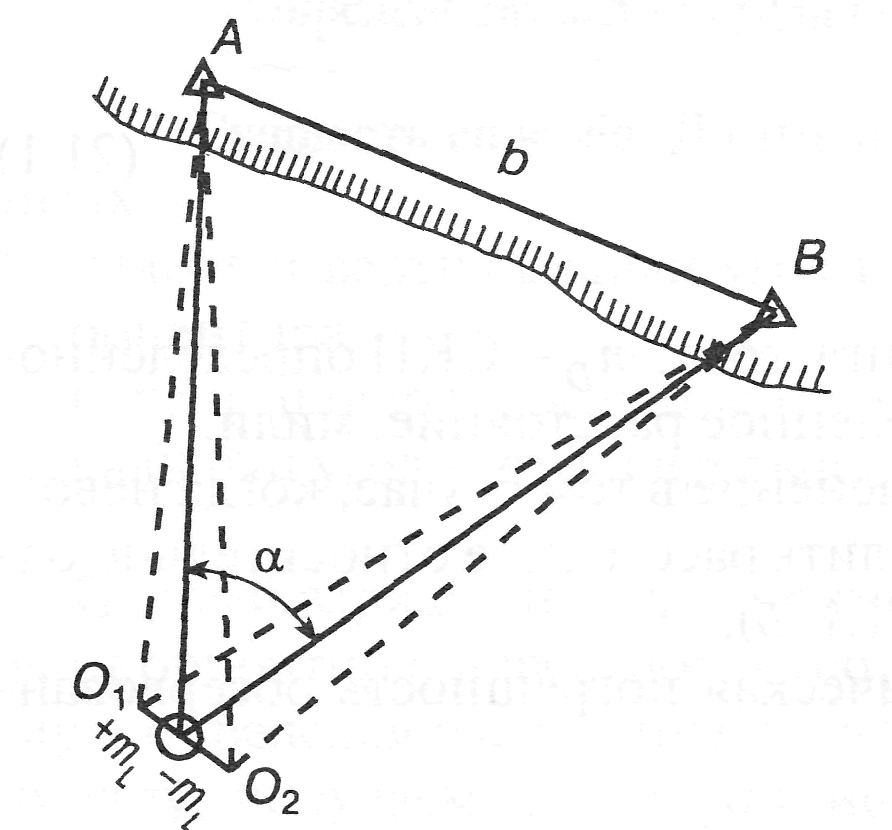
Два обозначенных на карте предмета А и В (рис. 43, а) различимы с судна под некоторым углом а. В этом случае изолинией будет окружность, вмещающая угол a, Чтобы найти центр этой окружности, точки А и В соединяют прямой линией; из этих точек в сторону предполагаемого места судна проводят две другие прямые под углом (90°—а) к линии АВ. В результате пересечения трех прямых образуется треугольник АВО, в котором углы при точках А и В равны каждый 90°—а, а угол при точке О равен 2а. Если точку О принять за центр окружности, проходящей через точки А и В, то угол АОВ окажется центральным углом, опирающимся на хорду АВ и равным 2а.
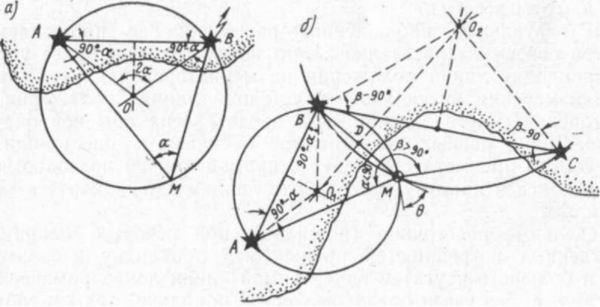
Тогда всякий вписанный в такую окружность угол, опирающийся на ту же хорду, будет равен половине угла АОВ, т. е. а. Если а>90° , то при построении АЛОВ прямые АО и ВО проводят под углом (а—90°) к линии АВ и в сторону, обратную предполагаемому месту судна.

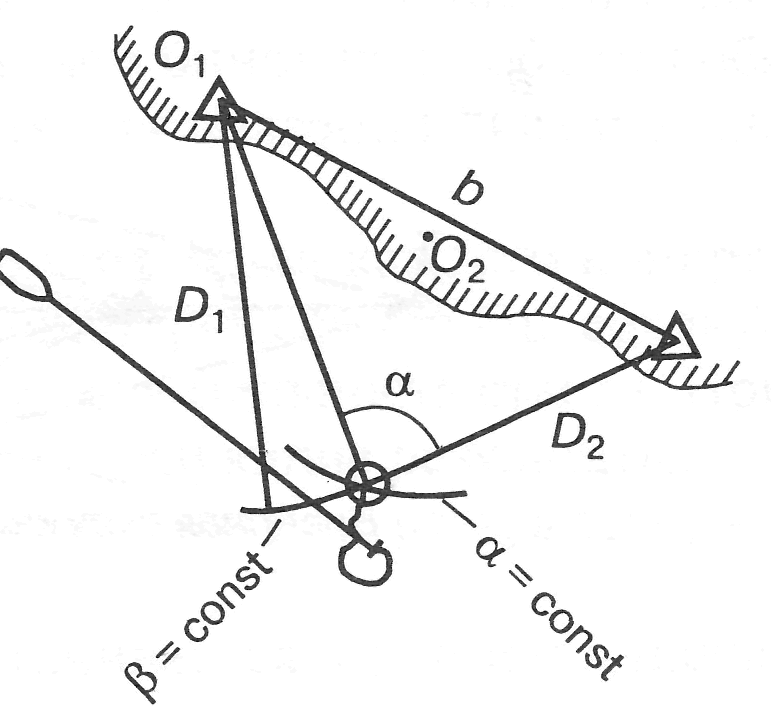
Если с судна видны три предмета А, В и С (рис. 43, б), то можно получить две линии положения в виде окружностей, пересечение которых определит место судна.
Может случиться, что все три предмета и судно лежат на одной окружности (рис. 44). Тогда из любой точки окружности предметы будут видны под одинаковыми углами а и Р и место судна определить невозможно. Этот случай называют случаем неопределенности, который может быть, если угол при среднем предмете В
![]()
Чтобы избежать случая неопределенности, следует правильно выбирать предметы для наблюдений. Так, если все три предмета расположены на одной прямой или средний предмет ближе к наблюдателю, чем крайние, а также если предметы образуют треугольник, внутри которого находится место судна, или расстояние до всех трех предметов одинаковое, то случай неопределенности исключен.
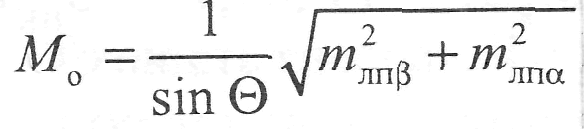
Определение места судна по двум горизонтальным углам является наиболее точным из всех навигационных способов. Ошибка в определении места судна этим способом может быть выражена формулой

где А — возможная ошибка в измеренных углах;
d0 — расстояние до среднего предмета;
d1 — расстояние до правого предмета;
d2 — расстояние до левого предмета;
S1 — расстояние между средним и правым предметами;
S2 — расстояние между левым и средним предметами;
O — угол пересечения окружностей.
Выбрав предметы, при помощи секстана измеряют медленно изменяющийся угол а, получая для него некоторое значение а1. Одновременно с измерением второго угла b замечают время по судовым часам и показания лага. Затем вновь измеряют угол а, получая для него второе значение а2. Полагая, что изменение углов происходит пропорционально времени, рассчитывают значение первого угла, как среднее из результатов первого и второго измерений этого угла, т. е. по формуле а= O*a/2 Полученные таким образом значения углов а и b считают приведенными к одному моменту (к моменту измерения второго угла). Исправив значения а и b необходимыми инструментальными поправками, производят прокладку на карте. Графическое построение при прокладке упрощается применением специального прокладочного инструмента — протрактора.
После установки линеек протрактор кладут на карту, совмещают две крайние линейки с нанесенными на карте крайними предметами и двигают протрактор таким образом, чтобы срез третьей неподвижной линейки совпал с изображением третьего предмета. Центр круга протрактора будет общей вершиной измеренных углов. Место судна определяется уколом острия иглы 5.
Протрактор часто заменяют листом прозрачной бумаги или кальки. В центре листа проводят прямую линию, заменяющую неподвижную линейку протрактора. При любой точке этой прямой линии строят левый и правый измеренные углы а и b. Далее калькой пользуются так же, как и протрактором. Точность прокладки при помощи кальки вполне достаточна для целей судовождения.
К недостаткам способа определения места судна по двум горизонтальным углам относятся: большое количество времени, затрачиваемое на наблюдения и прокладку; зависимость от наличия трех предметов, расположенных приблизительно в одной горизонтальной плоскости с глазом наблюдателя; отсутствие контроля за возможными ошибками в измерениях, а также правильностью нанесения видимых предметов на карту (последнее не обнаруживается даже при повторных наблюдениях). Поэтому в районах, где карты недостаточно точны, определение места судна по двум горизонтальным углам не рекомендуется.
Штурманское обеспечение плавания при ограниченной видимости.
Личное присутствие капитана на мостике и руководство им всеми действиями вахтенной службы (а случае необходимости капитан может оставить за себя старшего помощника);
четкая расстановка вахты и членов экипажа, вызванных для ее усиления, распределение конкретных обязанностей между судоводителями с целью своевременного обнаружения и исправления допущенных ошибок;
при возникновении сомнения в правильности определения места,
В критических ситуациях положительное развитие событий, предупреждение тяжелых последствий в значительной мере зависит от первоначальных действий вахтенного помощника капитана, которые будут им предприняты до прихода капитана на мостик.
Перечни возможных действий в типовых ситуациях приведены в соответствующем разделе настоящих Рекомендаций. Следует отметить, что эти перечни действий не ограничивают вахтенного помощника капитана в осуществлении тех действий, которые он сочтет нужными предпринять в конкретных обстоятельствах интенсивного судоходства.
Каждое судно должно следовать с безопасной скоростью, установлен ной применительно к преобладающим обстоятельствам и условиям ограниченной видимости. Судно с механическим двигателем должно держать свои машины готовыми к немедленному маневру.
При выполнении Правил Раздела 1 этой Части каждое судно должно тщательно сообразовывать свои действия с преобладающими обстоятельствами и условиями ограниченной видимости.
Судно, которое обнаружило присутствие другого судна только с помощью радиолокатора, должно определить, развивается ли ситуация чрезмерного сближения и (или) существует ли опасность столкновения. Если это так, то оно должно своевременно предпринять действие для расхождения, причем если этим действием является изменение курса, то, насколько это возможно, следует избегать:
изменения курса влево, если другое судно находится впереди траверза и не является обгоняемым;
изменения курса в сторону судна, находящегося на траверзе или позади траверза.
За исключением случаев, когда установлено, что опасности столкновения нет, каждое судно, которое услышит, по-видимому, впереди своего траверза, туманный сигнал другого судна или которое не может предотвратить чрезмерное сближение с другим судном, находящимся впереди траверза, должно уменьшить ход до минимального, достаточного для удержания судна на курсе. Оно должно, если это необходимо, остановить движение и в любом случае следовать с крайней осторожностью до тех пор, пока не минует опасность столкновения.
Девиация магнитного компаса. Основные способы ее уничтожения.
Отклонение чувствительного элемента компаса от направления магнитного меридиана под действием магнитного поля судна. Все части судна, изготовленные из магнитных материалов, намагничиваются под воздействием магнитного поля Земли как в период постройки, так и в период эксплуатации. Величина намагничивания зависит от напряженности магнитного поля Земли и магнитных свойств судового железа. Измеряется углом между магнитным и компасным меридианами в плоскости истинного горизонта наблюдателя. Она не является величиной постоянной, а изменяется в зави-симости от курса судна и широты. Для повышения точности курсоуказания и пеленгования с помощью магнитного компаса Д. уничтожают. Принцип уничтожения Д. основан на создании в центре компаса с помощью магнитов и мягкого железа сил, равных по величине и противоположных по направлению силам, создаю-щим Д. Остаточная Д. не должна превышать 2 — 3 град
Способ Эри является одним из наиболее распространенных способов уничтожения полукруговой девиации. При уничтожении полукруговой девиации способом Эри силы В/ и С/ компенсируйте на четырех главных магнитных курсах по девиациям, наблюденным на этих курсах.
Основными достоинствами этого способа является простота его применения и высокая точность результатов. Этот способ не требует вспомогательных приборов и поэтому применим для компасов любых систем.
Однако способ Эри имеет некоторые недостатки. При работе способом Эри приходится ложиться на магнитные курсы и на каждом из них определять девиацию, что возможно лишь при наличии на берегу створа или в крайнем случае отдаленного ориентир.
Способ Колонга получил широкое распространение в практике девиационных работ так как он выполняется на компасных курсах и в процессе работы никакие ориентиры не нужны. В этом заключается существенное преимущество способа Колонга перед способом Эри.
Но для выполнения работ этим способом необходимо иметь вспомогательный прибор - дефлектор. И по своей точности способ Колонга уступает способу Эри.
Основной причиной неточности компенсации сил В/ и С/ способом Колонга является индукция измерительного магнита дефлектора на мягкое железо, которое находится нактоузе для уничтожения четвертной девиации
Для того чтобы уничтожить четвертную девиацию, необходимо компенсировать силу которая эту девиацию вызывает т.е. силу D/. Этого можно достигнуть с помощью компенсаторов из мягкого железа трех видов: продольных брусков, поперечных брусков и шаров. Компенсаторы устанавливают на верхнем основании нактоуза.
Для выбора какой компенсатор из трех является наиболее приемлемым для практических целей, надо сравнить такие их качества, как компактность, удобство в обращении, простоту изготовления.
Способы определения остаточной девиации.
Ни один из применяемых на практике способов уничтожения девиации магнитного компаса не обеспечивает абсолютно полного ее устранения. Даже после очень тщательного уничтожения у компаса сохраняется остаточная девиация. Это объясняется несколькими причинами.
Остаточная девиация магнитного компаса может быть определена следующими способами:
- по измеренным компасным пеленгам створа;
- по компасным пеленгам отдельного ориентира;
- по сличению с гирокомпасом;
- по сличению показаний путевого магнитного компаса с главным магнитным компасом;
- по известной поправке магнитного компаса.
Остаточная девиация определяется на восьми (0, 45, 90, 135, 180, 225, 270, 315°) или, как исключение, на пяти (0, 72, 144, 216,288°) равноотстоящих курсах:
- на ходу, последовательно приводя корабль на курсы в соответствии с проектом маневрирования;
- без хода, разворачивая корабль на соответствующие курсы;
- на медленной циркуляции, выполняемой вокруг бочки с помощью буксира.
- Остаточную девиацию определяют с включенным и выключенным РУ.
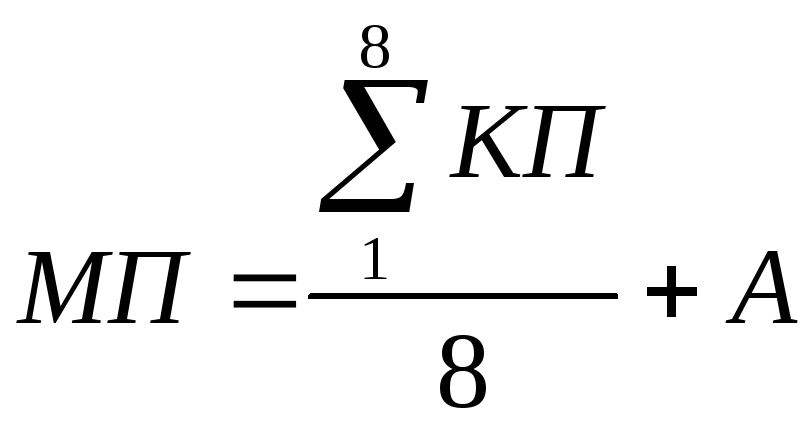
Вычисление таблицы остаточной девиации на любое число курсов производится по формуле:
![]()
Выполняется на малых ходах. На каждом новом курсе можно приступать к наблюдениям лишь через 2-3 минуты. Это необходимо для перемагничивания судового железа и успокоения картушки. Чаще всего определяют остаточную девиацию на 8 главных и четвертых курсах, затем вычисляют коэффициенты девиации, с помощью которых рассчитывают таблицу девиации через 10-15°. На каждом курсе определяют девиацию из 3-5 наблюдений, результат которых осредняется.
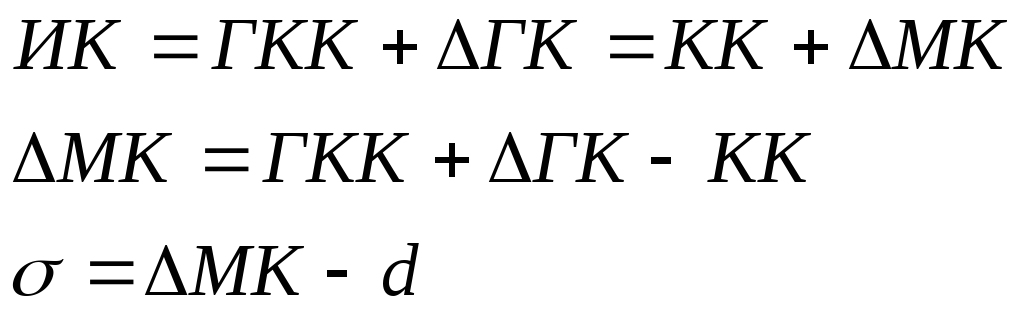
Способы определения остаточной девиации:
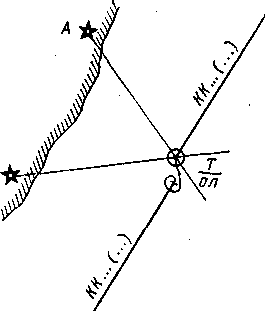
По пеленгам одного створа или отдалённого предмета.
![]()
Идём требуемым КК, в момент пересечения линии створа взять его ОКП.
![]()
Недостаток: не представляется возможным сделать серию наблюдений, так что все ошибки пеленгования войдут в σ. Точность определения девиации зависит также от достоверности склонения. Если створ не нанесён на карту:
Если коэффициент А велик, то он выбирается из предшествующей таблицы. Вместо створа можно использовать одиночный удалённый ориентир, при этом выставляется буёк, вокруг которого производится маневрирование судна. Пеленг берут в момент прохода буйка.
При стоянке судна на девиационном пале или бочке:
Данный способ применим, когда изменение пеленга Δ не превышает допустимой величины.
![]()
Если
задать Δ=0.2°, r=100м,
то
![]() .
.
По вееру створов (на девиационном полигоне) – наиболее точный способ.
Судно приводится на требуемый КК и снимаются ОКП 3-4 створов. Берётся среднее арифметическое значение ОКП на данном курсе. То же проделывается на остальных 7 курсах. Истинные направления створов и склонение снимаются с карты. При использовании этого способа исключаются грубые ошибки и промахи в пеленговании.
По сличению с гирокомпасом.
Судно приводится по магнитному компасу на заданный КК
Через 2-3 минуты одновременно замечаются КК и ГКК 3-4 раза
Осредняются величины КК и ГКК и вычисляется
 σ.
σ.
Следует иметь в виду, что у ГК имеется скоростная погрешность и инерционные погрешности 1 и 2 рода, поэтому – работать на малых ходах и избегать больших угловых скоростей при поворотах.
По сличению с главным магнитным компасом.
Используется для путевого компаса, т.к. его девиацию неудобно или невозможно определять по пеленгам (этот компас на судне обычно расположен в месте, неудобном для пеленгования).
![]()
По взаимным пеленгам.
Один
из компасов устанавливается на треноге
на берегу. По сигналу одновременно
берутся пеленга с этого компаса на судно
и с судна на компас. Для берега:
![]()
![]() (ОМП
– с берега, ОКП – с судна).
(ОМП
– с берега, ОКП – с судна).
По пеленгам небесных светил.
![]()
Берутся светила с малой высотой (без применения зеркала). Солнце – около моментов восхода и захода. Следует иметь в виду, что азимут светила постоянно меняется и каждый ОКП рассчитывается на определённый момент времени.
Вычисление коэффициентов девиации.
![]()
![]()
![]()
![]()
![]()
При использовании калькулятора:
![]()
где + - для КК – 0-180, - - для КК+180,
![]()
![]()
![]()
![]()
Упрощенный способ: построить график зависимости девиации от КК и снять с него значения девиации через 10-15°.
Контроль за работой судовых курсоуказателей.
Контроль за работой МК.
При использовании МК необходимо:
· Своевременно и качественно проводить береговые наблюдения и проверки МК на корабле;
· Перед выполнением девиационных работ на корабле осмотреть и проверить компас;
· При первой возможности определить поправку компаса, вычислить девиацию и сличить её с табличной; если надежно определенная и табличная девиации различаются на величину, большую 0,8? для главного и 1,2? для путевого МК, надо уточнить таблицу девиации путем определения остаточной девиации и вычисления таблицы девиации;
· Перед пеленгованием проверить по носовой курсовой черте котелка положение пеленгатора;
· Следить, чтобы азимутальный круг котелка при пеленговании находился в горизонтальном положении;
· Наклонить главную и предметную мишень к центру котелка после пеленгования, чтобы не повредить их колпаком, а пеленгатор повернуть на отсчет 90? (270?) для лучшего обзора картушки;
· Содержать компас в чистом виде, все металлические части внутри и снаружи, а также магниты-уничтожители смазывать тонким слоем вазелина;
· Протирать пеленгаторы бескислотным вазелином мягкой чистой ветошью; удалять пыль с оптических деталей беличьей кисточкой и протирать чистой салфеткой из фланели, замши или батиста; для удаления грязи и жирных пятен с оптики использовать вату, смоченную спиртом-ректификатом;
· Во время качки корабля, а также между походами пеленгаторы хранить в специальных футлярах; обыкновенный пеленгатор 127мм компаса хранить вместе с котелком в заводском ящике;
· Не иметь при себе железных предметов при работе с компасом, пеленговании и снятии отсчетов курса и пеленга;
· Магниты-уничтожители и снятый дефлектор держать на расстоянии не менее 3 метров от МК; если при работе дефлекторный магнит упал, работу начать заново;
· Картушку с наклонными стрелками брать только за алюминиевые радиусы;
· Вынимать картушку с наклонными стрелками из футляра перед её установкой в креновой котелок, предварительно поднеся футляр к котелку;
· Содержать приборы МК в корабельных помещениях с температурой не более + 50? С.
ТТД магнитного компаса КМ-145:
· Чувствительный элемент – система из шести стрелок;
· Поддерживающая жидкость – полиметилсилоксановая жидкость (ПМС-5);
· Допустимый застой ЧЭ – 0,2?;
· Цена деления картушки ЧЭ – 1,0?;
· Дистанционная передача – оптическая и электрическая;
· Количество репитеров – 5;
· Напряжение питания – 127/220 В, 50 Гц;
· Потребляемая мощность – 200-300 Вт;
· СКП компасного курса –
±0,3° (при спокойном состоянии моря);
±1,5° (при волнении до 5 баллов);
Таблица девиации. Требования НШСМ-86 по уничтожению и определению остаточной девиации магнитных компасов и поправок курсоуказателей.
Девиация магнитного компаса не остается постоянной, а изменяется от ряда причин: изменения кораблем магнитной широты, изменения магнитного состояния корабля, т. е. степени его намагниченности, и от положения корабля относительно направления магнитных силовых линий (от курса корабля).
По результатам, определения остаточной девиации, которая у правильно установленных компасов не превышает, как правда, 2—5°, составляются для всех корабельных магнитных компасов таблицы и графики девиации.
В таблицах величины девиации магнитного компаса приводятся на компасные курсы. Для различных состояний корабля (с выключенным СУ, включенным СУ) рассчитываются отдельные таблицы девиации.
Необходимо .отметить, что как бы хорошо ни была определена девиация и как бы тщательно ни была определена остаточная девиация магнитного компаса, она по указанным ранее причинам с течением времени изменяется. Поэтому, кроме периодических определений остаточной девиации и составления рабочей таблицы, необходимо использовать всякую возможность для уточнения девиации, чтобы получить уверенность в правильности табличных данных или ее отдельных значений.
Применяемый на практике метод вычисления таблицы состоит из трех этапов:
1) определяют девиацию на восьми главных и четвертных компасных курсах;
2) по полученным девиациям вычисляют коэффициенты девиации А, В, С, D и Е;
3) по известным коэффициентам вычисляют таблицу девиации для 24 или 36 компасных курсов.
Указанный метод обладает существенными достоинствами: во-первых, для работы этим методом нужно сравнительно немного времени (1—1,5 ч требуется для определения девиации на восьми курсах и еще 10—20 мин для вычислений и заполнения таблицы девиации); во-вторых, при вычислении коэффициентов A, В, С, D и Е благодаря применению особого математического приема обработки наблюдений значительно уменьшается влияние на результаты вычислений случайных ошибок, допущенных при пеленговании, т е. ошибок в определении девиации.
Остаточная девиация у главного магнитного компаса не должна превышать = 30 , а у путевого = 50.
Использование разновременных наблюдений ориентиров для определения места судна. Порядок выполнения и оценка погрешности обсерваций.
Если с судна виден только один предмет, измерить расстояние от которого по каким-либо причинам невозможно, то место судна определяют по способу крюйс-пеленга. Сущность этого метода заключается в том, что один и тот же предмет пеленгуют несколько раз через определенные промежутки времени.
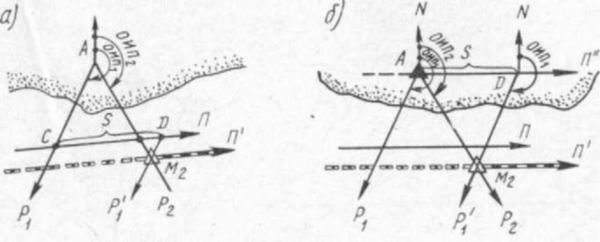
Пусть в какой-то момент получен истинный пеленг P1 предмета А (рис. 51,а) , а через некоторое время — Р2. За это время судно, следуя в направлении пути П, прошло расстояние 5. Чтобы определить место судна, производят прокладку следующим образом.
1. Из точки С (пересечения линии пути П с линией первого пеленга P1) откладывают расстояние S в сторону движения судна. Получают точку Д из которой проводят прямую DP1 параллельную линии пеленга Pt . Пересечение линии DP1 с линией второго пеленга Р2 даст точку М2 — место судна в момент взятия второго пеленга. Дальнейшее счисление ведут от точки М2 в направлении пути П'.
2. Через видимый с судна предмет А (рис. 51, б) проводят линию АП", параллельную линии П. На линии АП" откладывают расстояние S, пройденное судном за время между наблюдениями. Из полученной точки D проводят прямую ДР1, параллельную пеленгу Р1 Пересечение линии DP' 1 со вторым пеленгом дает место судна М2 в момент взятия второго пеленга. Этот способ особенно удобен, если в промежутке между наблюдениями судно меняло направление движения. Тогда от изображения предмета на карте последовательно прокладывают векторы всех участков пути и из конца суммарного вектора проводят линию, параллельную первому пеленгу.
Пересечение этой линии с линией второго пеленга даст место судна в момент второго наблюдения.
Определенное по методу крюйс-пеленга место судна называют счислимо-обсервованным и отмечают на карте специальным условным знаком Д.
Надежность счислимо-обсервованного места зависит не только от ошибок наблюдений и прокладки на карте, но еще и от ошибок счисления. Поэтому счислимо-обсервованное место менее надежно, чем обсервованное.
Способ крюйс-пеленга имеет ряд частных случаев.
1. Двойной угол. Если при первом наблюдении заметить угол АСП = а (рис. 52), а второе провести в момент, когда истинный пеленг Р2 составит с направлением движения судна угол ADП=2a, то образовавшийся треугольник ACD будет равнобедренным (AD = CD). Поэтому в момент второго наблюдения судно будет находиться на линии второго пеленга и на расстоянии от пеленгуемого предмета, равном величине плавания за промежуток времени между наблюдениями.

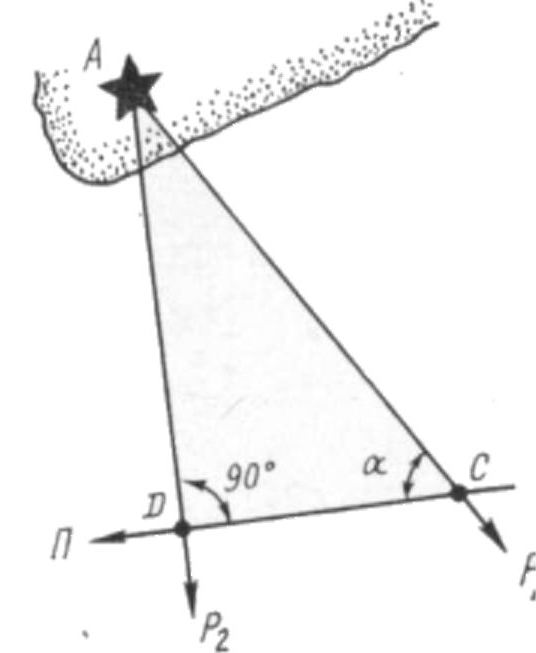
2. Траверзное расстояние. При первом наблюдении замечают угол АСП = а (рис. 53), а второе производят в тот момент, когда предмет будет находиться на линии Р2, перпендикулярной линии пути. Тогда из треугольника ACD
![]()
где CD=S — плавание, совершенное судном за промежуток времени между наблюдениями.
Если первое наблюдение делать тогда, когда угол а имеет только определенные значения — 45, 63,5 или 76°, то расстояние AD (кратчайшее) будет равно одинарной, удвоенной или учетверенной величине пройденного судном расстояния CD.
При отсутствии сноса от ветра и течения путь судна совпадает с его истинным курсом, а кратчайшим является траверзное расстояние. В связи с этим описываемый способ и получил название траверзный.
3. Прямой угол при предмете. Угол АСП=а (рис. 54), составляемый линией истинного пеленга P1 с направлением движения судна, замечают при первом наблюдении. Второе наблюдение производят в тот момент, когда истинный пеленг Р2 составит с направлением движения судна угол ADП= (90°+а) . В образовавшемся треугольнике A CD
![]()
где CD=S — плавание судна за промежуток времени между наблюдениями.
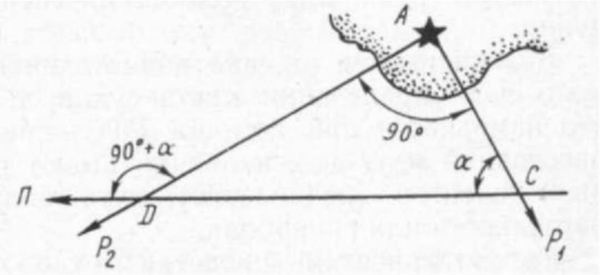
Если условиться делать первое наблюдение тогда, когда угол a = 30°, то расстояние AD будет равно половине плавания CD. Поэтому в момент второго наблюдения судно будет находиться на линии второго пеленга Р2 и на расстоянии от пеленгуемого предмета, равном половине плавания судна за промежуток времени между наблюдениями.
4. Разновременные пеленги двух предметов (рис. 55). Если с судна виден предмет А, который невозможно запеленговать дважды, то перед его скрытием берут пеленг Р1 замечая по судовым часам время и показания лага.
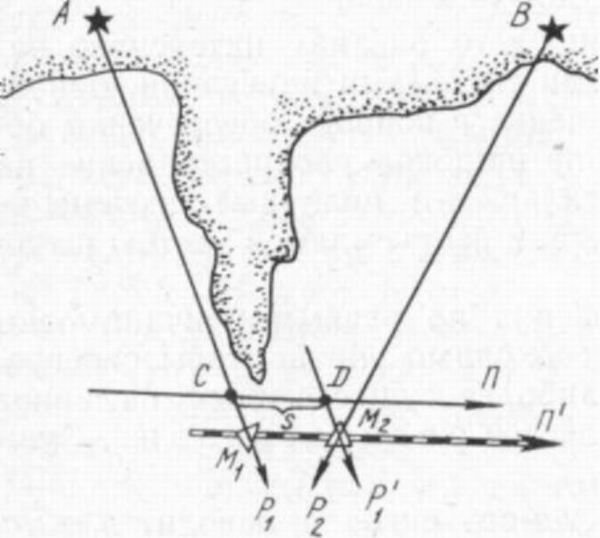
После открытия предмета В на него также берут пеленг Р2 и замечают время и отсчет лага. Рассчитав расстояние, пройденное судном за время между двумя наблюдениями, получают место в момент второго наблюдения.
5. Крюйс-расстояние — определение места судна по измерению двух расстояний до одного и того же предмета. Теория и практическое выполнение аналогичны определению по крюйс-пеленгу.
Определение места судна по двум пеленгам. Порядок выполнения. Оценка точности обсервации.
Практическое выполнение такого способа заключается в подборе двух, хорошо видимых ориентиров с расчетом, чтобы угол между направлениями на них был по возможности близким к 90°, но, во всяком случае, не меньше 30 и не больше 150°. Берут по компасу пеленги ориентиров. Время и ол замечают в момент вторых наблюдений. Компасные пеленги исправляют поправкой компаса в истинные и прокладывают на карте (рис. 2). Обсер-
s
Рис.
Определение
места по
двум пеленгам
Точность полученного обсервованного места, если исключено влияние ошибок от неодновременного взятия пеленгов, зависит от случайных ошибок при пеленговании, а также от ошибок в принятой поправке компаса. Влияние их будет наименьшим, когда угол между пеленгами равен или близок 90°. Если угол между направлениями на ориентиры меньше 30 или больше 150°, то полученному по двум пеленгам обсервованному месту доверять нельзя.
При незначительных случайных ошибках наблюдений и уверенности в правильности учитываемой поправки компаса точность определения места судна по двум пеленгам вполне удовлетворительная..
Определение места судна комбинированными способами (пеленг и горизонтальный угол, пеленг и расстояние и др.). Порядок выполнения и оценка погрешности обсерваций.
Определение места судна по пеленгу и вертикальному углу.
Сущность способа. Данный способ реализуется в двух вариантах:
• пеленг и вертикальный угол измеряются относительно одного ориентира;
• пеленг измеряется относительно одного ориентира, а вертикальный угол — относительно другого.
Первый вариант находит применение в том случае, когда виден один ориентир с известной высотой h. Измеряя пеленг на ориентир и определяя расстояние до него по измеренному вертикальному углу, получаем две навигационные изолинии — изоазимуту и изостадию. При относительно небольших расстояниях, что свойственно всем визуальным способам определения места судна, эти изолинии пересекаются практически под прямым углом. На карте в проекции Меркатора изоазимута изображается отрезком прямой, проведенной по направлению О ИЛ от ориентира. Изостадия изображается окружностью, проведенной из места ориентира радиусом, равным определенному расстоянию (рис. 21.1, а).
Если определение места производится по отдаленному ориентиру, то при плавании в высоких широтах измеренный пеленг дополнительно исправляется ортодромической поправкой.
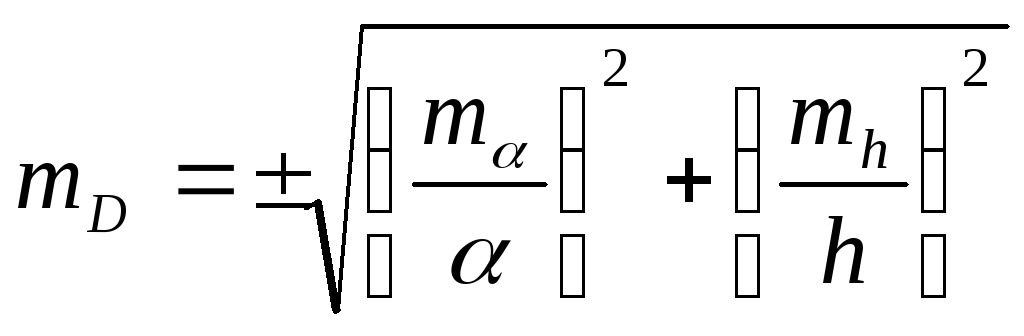
Точность способа. Точность обсервации определяется точностью измерения пеленга и определения расстояния до ориентира. Она оценивается СКП места, которая рассчитывается по формуле

Определение места судна по пеленгу и горизонтальному углу
Данный способ находит применение в том случае, когда один из двух находящихся в поле зрения ориентиров невозможно запеленговать (например, ориентир не наблюдается с места установки пеленгатора).
Измеренному пеленгу наблюдаемого ориентира соответствует навигационный параметр — изоазимута, измеренному горизонтальному углу между направлениями на ориентиры — изогона. Обсервованное место — в точке пересечения изолиний (рис; 21.2).
На карте, выполненной в проекции Меркатора, это место может быть получено тремя способами:
1) построением навигационных изолиний;
2) переходом к определению места по двум пеленгам;
3) с помощью кальки с нанесением на нее измеренного горизонтального угла.
При применении первого способа используются приемы нанесения на карту навигационных изолиний
При применении второго способа рассчитывается обратный истинный пеленг не наблюдаемого в пеленгатор ориентира
ОИЩ = ОИЩ + а.
Третий способ получения места на морской навигационной карте предусматривает следующие действия:
• на кальку наносятся две прямые, пересекающиеся под углом, равным суммарному горизонтальному углу а;
• на карту наносится линия обратного истинного пеленга наблюдаемого ориентира;
• калька накладывается на карту так, чтобы вершина горизонтального угла помещалась на линии ОИП;
• перемещением вершины горизонтального угла по линии ОИП добиваются такого ее положения, при котором лучи, образующие угол, проходят через первый и второй ориентиры; вершина угла — обсервованное место
Точность обсервованного места зависит как от точности пеленгования, так и от точности измерения горизонтального угла
Модуль смещения может быть рассчитан по формуле
![]()
Где ‘b’ расстояние между ориентирами
Его удобно использовать, когда требуется знать направление вероятного распределения погрешностей места.
Определение места судна по горизонтальному и вертикальному углам
Данный способ находит применение в том случае, когда в видимости наблюдателя находятся два ориентира, однако возможно измерение вертикального угла только одного ориентира, а проблемы измерения горизонтального угла между ориентирами нет.
Оба навигационных параметра измеряются одновременно двумя наблюдателями. Если наблюдатель один, то первый навигационный параметр измеряется дважды — до измерения второго навигационного параметра и после. В расчет принимается среднее арифметическое значение из результатов этих измерений. Время и отсчет лага фиксируются в момент измерения второго навигационного параметра. Первым измеряется тот параметр, который при данном расположении ориентиров изменяется медленней, чем другой.
Измеренному вертикальному углу соответствует навигационная изолиния — изостадия, измеренному горизонтальному углу — изогона. Градиенты навигационных параметров направлены из обсервованного места в сторону центров изолиний.
Обсервованное место на морской навигационной карте может быть получено двумя способами:
1) построением навигационных изолиний;
2) использованием кальки с нанесенным на нее горизонтальным углом.
Первый способ — построение изогон и изостадий . Обсервованное место находится в точке пересечения изолиний.
Второй способ реализуется практически так же, как и определение места судна по пеленгу и горизонтальному углу. Различие — на карте проводится изостадия, по которой перемещают вершину горизонтального угла
Оценка точности обсервованного места производится по формуле
где т'а и — средние квадратические погрешности горизонтального и вертикального углов, соответственно;
Определение места судна с помощью судовой РЛС (по 2-3 расстояниям, пеленгу и расстоянию, расстояниями до берега с плавными очертаниями). Порядок выполнения, оценка погрешности.
Определение места судна по расстояниям, измеренным до нескольких ориентиров. Намечают перед определением места ориентиры на карте и быстро последовательно измеряют расстояния до них. При необходимости измеренные расстояния приводятся к одному моменту времени.
В момент последнего измерения замечается время и отсчет лага. На карте находится обсервованное место, которое является точкой пересечения дут окружностей, проведенных из ориентиров (с учетом приведения их к одному моменту времени), как из центров с радиусами, равными измеренным расстояниям.
При выборе ориентиров необходимо следить за тем, чтобы линии положения пересекались под углом в пределах от 30 до 150°, причем сначала измеряется расстояние до ориентира, который близок к курсовому углу, равному 90°, а затем на ориентиры, курсовые углы которых близки к 0 или 180°.
На карте находится счислимая точка, указывается невязка, прокладывается линия пути, оформляются надписи.
Если при определении по трем расстояниям окружности не пересекаются в одной точке, то за обсервованное место принимается середина треугольника погрешностей. Если треугольник велик, то необходимо проверить правильность опознавания ориентиров, измерений и прокладки.
Радиальная средняя квадратическая погрешность определения места судна по расстояниям, кбт:
а) при двух ориентирах
![]()
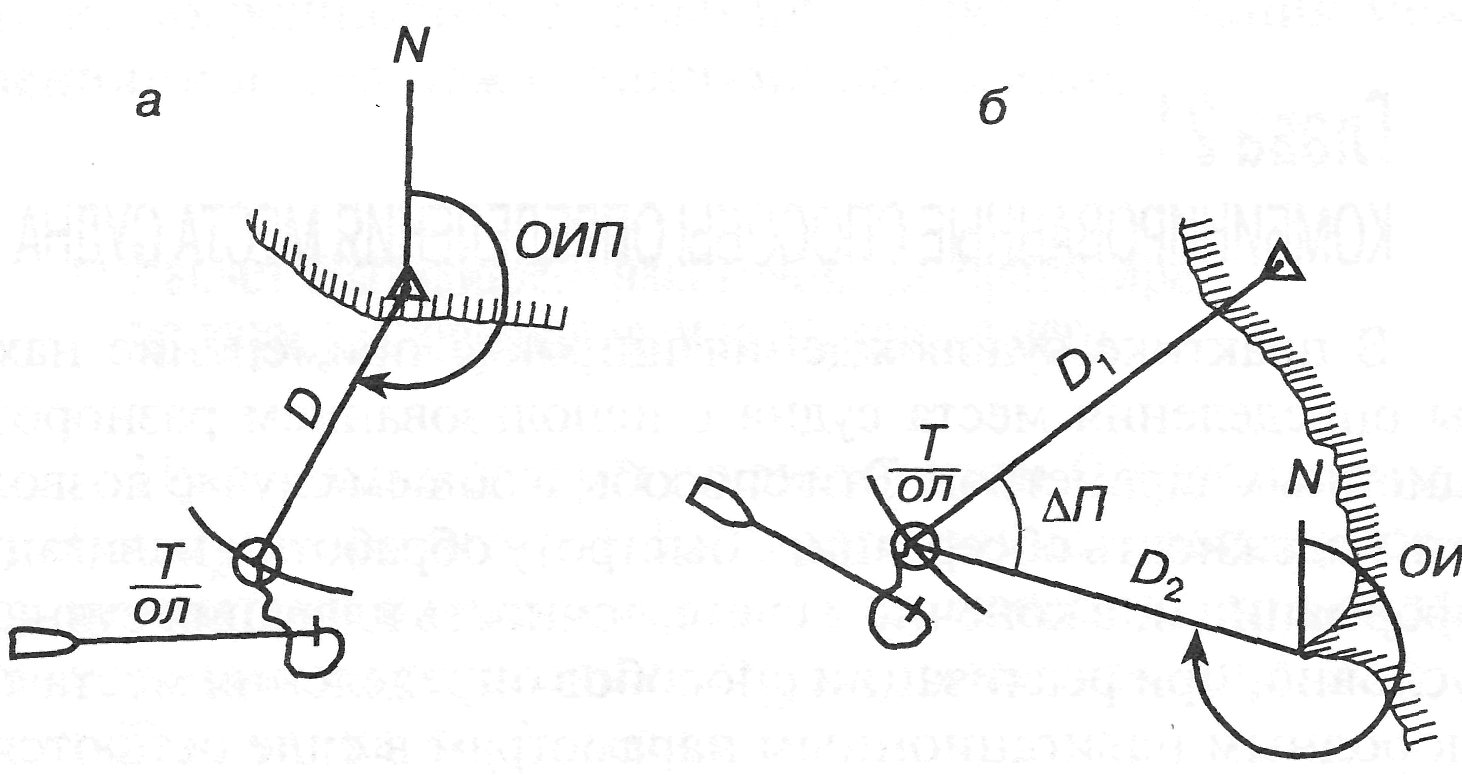
Определение места судна по радиолокационному пеленгу и расстоянию до одного ориентира. Способ применяется, если в пределах действия PJIC находится один ориентир. Для этого необходимо одновременно взять пеленг на ориентир и измерить до него расстояние, заметить время и отсчет лага. Затем проложить обратный пеленг (ШП±180°) от ориентира на карте.
Из ориентира, как из центра окружности с радиусом, равным измеренному расстоянию, провести дугу окружности. Место судна находится в пересечении пеленга с дугой окружности. Рассчитывается счислимая точка на момент измерения и показывается невязка.
При измерении пеленга его необходимо исправить поправкой гирокомпаса. Если же измерялся радиолокационный курсовой угол (РЛКУ) на ориентир, то истинный пеленг
![]()
РСКП определения места судна в этом случае рассчитывается по формуле
![]()
где т — СКП радиолокационного пеленга; mD — СКП радиолокационного расстояния; D — радиолокационное расстояние.
Порядок и правила корректуры морских навигационных карт, руководств и пособий для плавания. Учет корректуры.
Судовая коллекция карт и руководств для плавания делится на три группы:
Первая группа включает комплекты карт и руководств для плавания, предназначенные для обеспечения плавания:
- по судоходной линии, на которой закреплено судно, традиционные районы промысла;
- между определёнными портами, а для нелинейных судов в соответствии с очередным рейсовым заданием. К первой группе относятся также каталоги карт и книги.
Вторая группа включает карты, и руководства для плавания, которые могут быть использованы в предстоящем плавании в случаях отклонения судна от намеченного пути, непредвиденного захода в порт-убежище и т.д.
Третья группа включает все остальные карты и руководства для плавания, входящие в судовую коллекцию.
Комплекты первой группы корректируются с получением ИМ и других корректурных документов. Корректура их должна быть закончена до выхода в рейс.
Если стоянка в порту кратковременная и корректуру невозможно выполнить до выхода судна в рейс, разрешается, по усмотрению капитана, производить корректуру раздельно, по этапам перехода. До выхода из порта необходимо закончить корректуру в таком объёме, чтобы обеспечить плавание судна не менее чем на первые трое суток. Корректура остальных карт первой группы выполняется на переходе и во время стоянки в промежуточных портах.
Комплекты второй группы корректируется после завершения корректуры первой группы. Комплекты третьей группы на судне в рейсе, как правило, не корректируются, однако корректурный материал для них систематизируется в последовательности его поступления, хранится на и используется по необходимости при изменении рейсового задания.
На судах рыбной промышленности в период меж рейсовых стоянок корректуру карт и руководств для плавания производят, как правило, ЭРНК по заявке, подаваемой капитаном судна.
По своему характеру ИМ подразделяются на постоянные, временные и предварительные.
Постоянные ИМ содержат сведения о навигационной обстановке, не подвергающейся частым изменениям.
Временные ИМ содержат сведения о непродолжительных изменениях в навигационной обстановке. В тексте, которых указан срок их действия, автоматически утрачивают своё значение по истечении указанного срока.
Предварительные ИМ содержат сведения о наиболее важных предполагаемых или планируемых в ближайшее время изменений в навигационной обстановке.
Корректуру карт следует начинать с последнего номера ИМ и выполнять её в последовательности убывания номеров.
Из карт, подобранных на предстоящий рейс, в первую очередь корректируются наиболее крупного масштаба.
Корректура на картах выполняется следующим образом:
- по постоянным ИМ новые данные наносятся красной тушью (чернилами) чертёжным пером; прежние перечёркиваются крестиком, а текстовая часть зачёркивается тонкой линией.
- по временным и предварительным ИМ, а также по НАВИП корректура карт выполняется аналогично, но простым карандашом.
Корректура карт первой группы по радионавигационным сообщениям выполняется немедленно.
Журнал учёта корректуры» предназначен для систематизации и учёта вносимых на карты изменений. В «Журнале» перечислены по номерам все карты, входящие в Адмиралтейскую Серию. Карты, входящие в судовую коллекцию, отмечаются в «Журнале» и для каждой из них записывается:
I. номер фолио (Стандартной Адмиралтейской системы фолио или судовой системы, если они различны);
II. дата публикации действующего издания карты;
III. номера извещений, по которым корректировалась карта.
Фрагмент страницы «Журнала учёта корректуры» представлен на рис. 5:
В последней графе в скобках указан год, к которому относятся идущие за ним номера извещений. Записи этой графы должны соответствовать записям левых нижних углов соответствующих откорректированных карт.
-
Chart No.
Folios in which included
Notices to Mariners affecting chart
2720
6
1992 Jan 12 (NE) - (1992) -1217 2120 -2213 - (1994) - 18
Графический способ учета течения при выполнении навигационной прокладки.
Учет постоянного течения при графическом счислении. При графическом счислении по относительному лагу решают две типовые задачи.
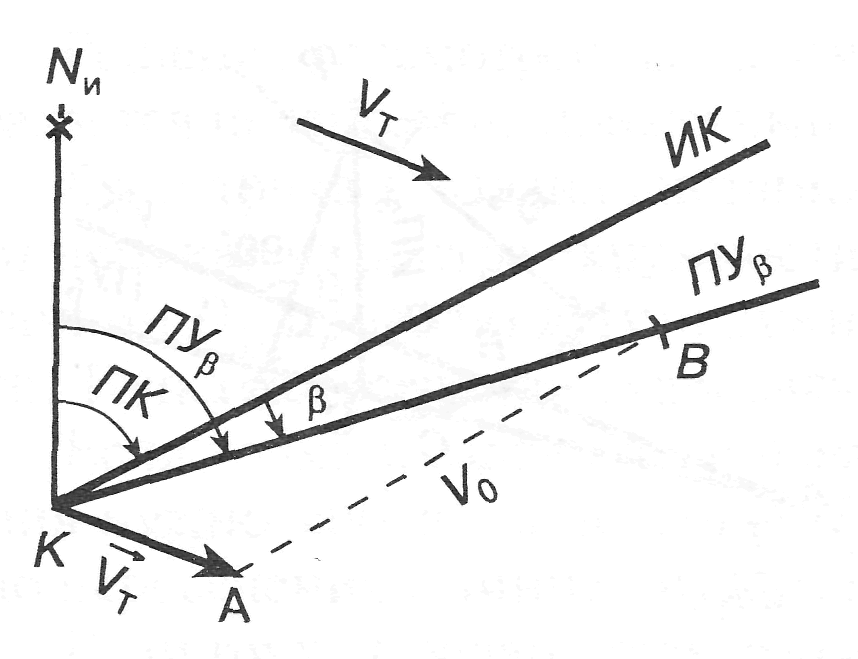
Задача 1 (прямая). Расчет пути и путевой скорости при учете течения.
По истинному курсу ИК, скорости судна V0 и элементам течения Кт и VT необходимо определить путь судна и путевую скорость V.
Из точки К, начала учета постоянного течения, прокладывается линия истинного курса ИК (рис. 15.19).
На этой линии от точки К откладывается вектор скорости судна V0. Из конца вектора скорости судна (точка А) прокладывается линия Кт направления течения, по которой откладывается вектор скорости течения VT. Соединив точку К с концом вектора скорости течения (точкой В), получают линию пути. Измерив направление линии пути KB транспортиром, получают путь судна с учетом течения ПУβ. Величина отрезка KB является вектором путевой скорости V. Угол сноса рассчитывается по формуле
![]()

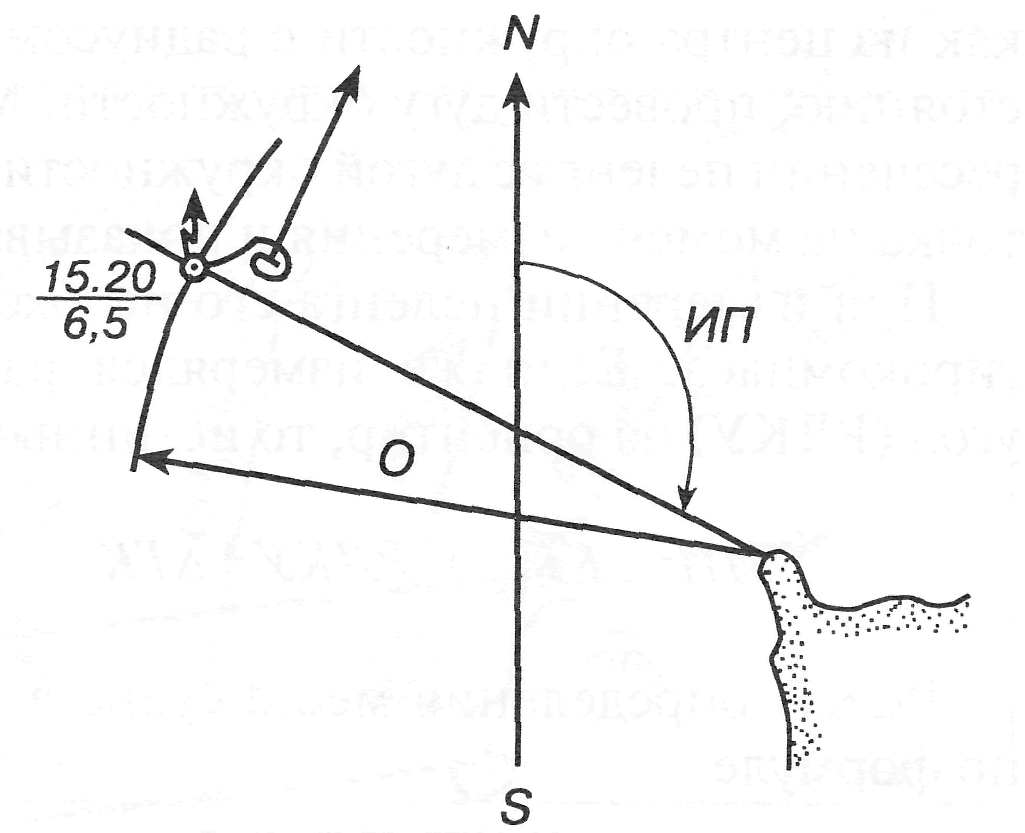
Задача 2 (обратная). Расчет компасного курса для следования по заданной линии пути при течении.
По заданному пути с учетом течения ПУβ, известным скорости судна V0, элементам течения Кt, VT и поправке компаса ΔГК следует определить необходимый компасный курс.
Из точки K начала учета течения прокладывается заданная линия пути ПУβ (рис. 15.20). Из этой же точки прокладывается линия по направлению течения Кт, по которой откладывается величина скорости течения Vt. Из конца вектора течения (точка А) радиусом, равным скорости судна V0, делается засечка на линии пути (точка В). Линия АВ параллельна направлению истинного курса ИК. С помощью параллельной линейки по направлению линии АВ из точки К проводится линия истинного курса. Направление ИК этой линии измеряется с помощью транспортира. Угол β рассчитывается по формуле (15.5). Рассчитанное далее значение компасного курса КК= ИК— ΔГК задается рулевому.
Как видно из построений при решении рассмотренных задач, далее графически решается выражение V= V0 + Vt.
Относительный лаг измеряет пройденное судном расстояние по направлению истинного курса и течения не учитывает. Поэтому при ведении графического счисления с учетом течения, пройденное судном расстояние откладывается по линии истинного курса, а затем полученное место переносится на линию пути по направлению течения. При этом решаются следующие типовые задачи.
Задача 3. Расчет координат текущего места судна.
Исходная точка А на момент T1, отсчет лага олх, истинный курс ИК, скорость судна V0, элементы течения Кт и VT известны.
При необходимости определить координаты судна следует заметить время Т2 по морским часам, а по репитеру лага заметить его отсчет ол2.
Рассчитывается пройденное судном расстояние
![]()
Для контроля рассчитывается расстояние и по времени плавания
![]()
Расстояния, рассчитанные по лагу и по времени, должны сходиться. При получении расхождения в расстояниях следует проверить расчеты и исключить возможную ошибку.
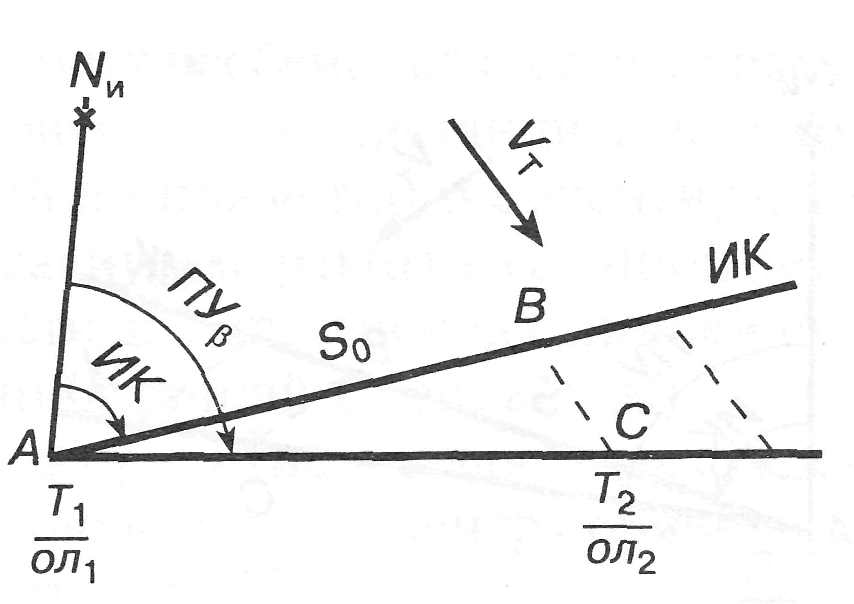
Полученное расстояние S0 откладывается по линии истинного курса (рис. 15.21). Из полученной вспомогательной точки В проводится линия, параллельная направлению течения, до пересечения с линией пути. Точка пересечения С и будет искомой точкой текущего места судна С. Возле нее записывают время Т2 и ол2. При необходимости с карты могут быть измерены счислимые географические координаты φc и λс этой точки
Аналогичным образом решается задача предвычисления координат на любой заданный момент времени. Так как в этом случае отсчет лага неизвестен, пройденное расстояние рассчитывают по времени и назначенной скорости плавания:
![]()
Задача 4. Предвычисление отсчета лага и времени прибытия судна в заданную точку.
Исходное место А на момент времени Т1 и отсчет лага ол1, истинный курс ИК и скорость V0, а также элементы течения Кт и VT известны.
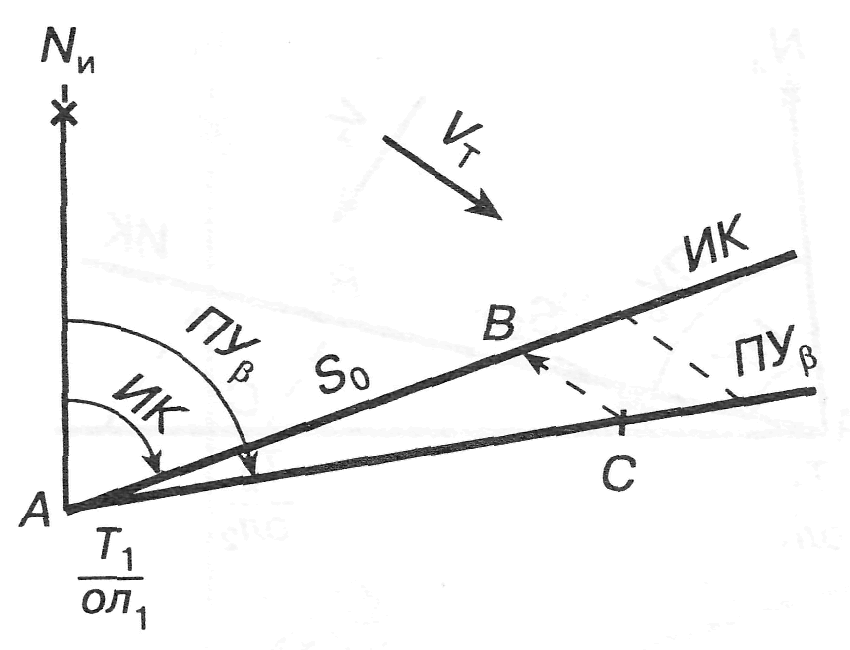
Для решения из заданной точки С проводится линия, параллельная вектору течения, в противоположную сторону до пересечения с линией истинного курса в точке В (рис. 15.22).
Далее с помощью циркуля измеряется длина отрезка АВ, которая соответствует относительному расстоянию S0. Именно это расстояние предстоит пройти судну, чтобы с учетом течения оказаться в заданной точке С. Далее рассчитываются время плавания t момент Т2:
![]()
Рассчитываются разность отсчетов лага рол и отсчет лага ол2:
![]()
При фактическом прибытии судна в точку С зафиксированные время и отсчет лага сличаются с расчетными.

20. Оценка точности определения места судна. Дискретность обсерваций.
Оценка точности текущего места является обязательным условием безопасного движения судна по заданному маршруту. Судно находится в безопасности, если дистанция до ближайшей навигационной опасности превышает предельную погрешность определения текущего места, за которую принимают тройное значение СКП.
Погрешность определения текущего места складывается из погрешности исходной обсервации и погрешности счисления за время плавания после обсервации.
СКП определения места по трем гирокомпасным или радиолокационным пеленгам, трем радиолокационным расстояниям, радиолокационным пеленгу и расстоянию, гирокомпасному пеленгу и радиолокационному расстоянию, РНС "Декка", "Марс-75", "Лоран-C" и "Чайка" с фиксацией фазы в приемоиндикаторе при средних условиях измерений каждым способом составляет 0,1—0,3 мили, при худших условиях — 0,2—0,5 мили; по радиопеленгам, высотам светил — 1—3 мили.
При использовании приемоиндикатора СНС в океанах и открытых морях погрешность обсервации составляет 0,3—0,8 мили, а погрешность счислимого места равна 0,8— 1,2 мили при средних интервалах между обсервациями порядка 1 ч. При увеличении интервалов между обсервациями до 2 ч погрешность счислимого места достигает 1,5—3,0 мили. В прибрежных районах погрешности обсервации и счислимого места могут быть в 2 раза больше.
Погрешность счислимого места, за редкими исключениями, обычно не превышает 10ДГ от пройденного расстояния при плавании до 3 ч, 8 % — при плавании 6—10 ч, 6 Ж — при плавании 14—18 ч.
При плавании в районе со стесненными условиями, выборе безопасной скорости и при расхождении с другими судами учитываются маневренные характеристики судна. Способ учета (глазомерный, графический и т.д.) определяется в зависимости от обстановки.
В штормовых и ледовых условиях, в мелководных районах табличные значения маневренных характеристик судна заметно отличаются от фактических. Поэтому необходимо накапливать и учитывать опыт плавания в таких условиях.

Способы определения угла дрейфа и сноса судна течением (его элементы).
Влияние ветра на движение корабля. Определение угла ветрового дрейфа
Ветер, обдувая надводную часть корпуса и надстройки корабля, вызывает появление аэродинамических сил, сумма которых носит название полной аэродинамической силы. Величина и направление полной аэродинамической силы зависят от ряда факторов, из которых наибольшее значение имеют форма и размеры («парусность») надводной части корабля, направление и скорость потока воздуха относительно корабля. Истинный ветер—это ветер, который наблюдается относительно водной поверхности (может быть замерен при стоянке корабля на якоре, бочке и т. п.).
Кажущийся ветер—это ветер, который непосредственно наблюдается на движущемся корабле; его направление и скорость определяются по показаниям корабельных приборов, исправленным инструментальными поправками.
Скорость истинного ветра находится из векторного равенства
Ū = W + V , (163)
где W — вектор скорости кажущегося ветра (все буквы в формуле с черточкой наверху, как на первой букве Ū, просто я еще не нашел шрифт с остальными такими же буквами, обозначающими вектор);
V — (с черточкой наверху) вектор скорости хода корабля.
Следовательно, если известны скорость и направление кажущегося ветра, истинный ветер может быть рассчитан по формуле (163).
Направлением ветра всегда называют то направление, откуда дует ветер. Существует мнемоническое правило: «ветер дует в компас». Угол qw между диаметральной плоскостью корабля и направлением кажущегося ветра называется курсовым углом кажущегося ветра. Если ветер дует в левый борт корабля, то говорят, что «корабль идет левым галсом» по отношению к ветру; если ветер дует в правый борт— «корабль идет правым галсом» по отношению к ветру. Ветер, дующий с кормы, называется попутным, с носа— встречным (противным).
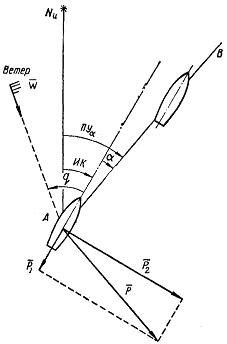
Направление полной аэродинамической силы Р (с черточкой вверху, вот ведь как неудобно, коли не знаешь) в общем случае не совпадает с направлением вектора скорости кажущегося ветра. Полная аэродинамическая сила может быть разложена на две составляющие: продольную P1, направленную вдоль диаметральной плоскости корабля, и поперечную Р2 (все с черточками, то бишь векторы), направленную перпендикулярно диаметральной плоскости (рисунок внизу).
Продольная составляющая Р1 вызывает изменение скорости перемещения корабля относительно воды. Если эта сила направлена в корму, то скорость хода будет меньше, чем при тех же оборотах винтов и отсутствии ветра. Если составляющая Р1 полной аэродинамической силы направлена в нос корабля, то при отсутствии волнения скорость должна увеличиться. Однако потеря скорости от волнения моря обычно более велика и увеличение скорости от ветра может иметь место лишь при небольшом волнении.
Поперечная составляющая Р2 полной аэродинамической силы вызывает дрейф—смещение корабля вследствие давления ветра на его надводную часть. Поэтому при ветре корабль перемещается относительно воды не вдоль своей диаметральной плоскости, а под некоторым углом к ней, именуемым углом дрейфа a.
Линия АВ, по которой происходит перемещение корабля относительно водной среды, называется линией пути, а угол ПУa, который она составляет с плоскостью истинного меридиана, — путевым углом.
Из рисунка внизу видно, что путевой угол и истинный курс корабля связаны между собой соотношением
ПУa = ИК + a (164)
a = ПУa - ИК . (165)
Если корабль идет левым галсом по отношению к ветру (ветер дует слева), он сносится ветром вправо;
величина путевого угла будет больше, чем истинный курс корабля; угол дрейфа считается положительным. Ветром, дующим в правый борт, корабль сносится влево; угол дрейфа в этом случае считается отрицательным. Величина угла дрейфа зависит от таких факторов:
— осадки, размеров и формы обводов подводной части корпуса корабля. У коротких с малой осадкой кораблей угол дрейфа при прочих равных условиях больше, чем у длинных с большой осадкой;
— размеров и формы надводной части корпуса и надстроек корабля; чем выше борт и больше площадь надстроек (их «парусность»), тем больше угол дрейфа;
— курсового угла и скорости кажущегося ветра;
- угол дрейфа равен нулю при курсовых углах кажущегося ветра 0 или 180°, максимален при ветре с траверза и увеличивается при увеличении скорости ветра;
— скорости хода корабля; при прочих равных условиях угол дрейфа тем больше, чем меньше скорость хода.
Для учета дрейфа при прокладке необходимо, знать угол дрейфа. Углы дрейфа определяются при различных курсовых углах и скорости кажущегося ветра и скорости хода корабля по наблюдениям, выполненным в море. Организуя такие наблюдения, необходимо помнить, что достоверность их результатов может быть достигнута лишь при высокой точности и тщательности всех измерений; в частности, в каждом случае определения угла дрейфа необходимо точно измерять направление и скорость кажущегося ветра. Все обстоятельства опыта (волнение моря, район и способ наблюдений) должны записываться в специальном журнале. Одновременно с углом ветрового дрейфа определяется и потеря скорости хода корабля от влияния ветра и волны.
Наиболее достоверные результаты дают следующие способы определения угла ветрового дрейфа.
Способ 1. Определение дрейфа и пути корабля по обсервациям.
По ряду определений мест корабля на карте проводится линия пути, направление которой ПУa измеряется с помощью параллельной линейки и транспортира. Угол дрейфа вычисляется по формуле (165).
Обычно определения места корабля не бывают абсолютно точными, вследствие чего обсервованные точки располагаются не по прямой, а по ломаной линии. В этом случае за путевой угол принимается направление средней линии, проведенной между обсервованными точками.
На величину путевого угла влияет не только дрейф корабля, но и течение. Чтобы исключить влияние течения, при определении величины дрейфа поступают следующим образом (рисунок чуть выше слева). От точки на линии пути, соответствующей последнему определению места в направлении, противоположном направлению течения, откладывают отрезок
ВС = {(Тп - Т1) / 60} * vт ,
где Тп - Т1 — промежуток времени между первым и последним определениями места в минутах;
vт — скорость течения в узлах.
За путевой угол ПУa принимается направление прямой AС. Одновременно с углом дрейфа определяется и потеря скорости хода корабля от влияния ветра и волны. Для этого надо снять с карты пройденное расстояние Sоб =АС и вычислить скорость хода корабля относительно воды:
V'об = S'об / Tп - T1 . (166)
Потеря скорости хода находится по формуле
ΔV = V'об -Vоб, (167)
где Vоб — скорость по оборотам гребных винтов, исправленная поправками на отклонение водоизмещения от нормального и на обрастание подводной части корпуса корабля.
Частным случаем рассмотренного способа является определение угла дрейфа по створу или по отдаленному предмету. Если корабль ляжет на створ так. чтобы направление его перемещения точно совпадало с направлением створа, то угол дрейфа определится как разность между направлением створа (он же ПУa ) и истинным курсом, при котором корабль перемещался по линии створа.
Средняя квадратическая ошибка определения угла дрейфа этим способом в зависимости от условий наблюдений имеет порядок 1,0—1,5°. Основной причиной сравнительно низкой точности способа является ошибка в учете исключаемого течения.
Способ 2. Определение направления перемещения корабля относительно свободно плавающего предмета.
Этот способ основан на измерении пеленгов и расстояний или только пеленгов до свободно плавающего предмета, обладающего минимальной парусностью (вешка, притопленный буек и т. п.). Сбросив плавающий предмет в избранном для испытаний районе, корабль совершает около него на разных курсах несколько пробегов длиной около 2 миль каждый. Курсы выбираются так, чтобы наблюдения были выполнены при курсовых углах кажущегося ветра 30, 60, 90, 120, 150°. Измерение пеленгов и расстояний рекомендуется проводить в секторе курсовых углов от 40 до 130° при траверзном расстоянии до предмета 3—4 каб. Для повышения точности наблюдений, пеленги следует измерять визуально; расстояния—при наиболее крупном масштабе изображения на экране радиолокационной станции. Необходимо также обеспечить полную синхронность измерений пеленгов и расстояний.
Прокладка выполняется на листе чистой бумаги или маневренном планшете в возможно более крупном масштабе. Произвольная точка (центр планшета) принимается за предмет (веху); места корабля относительно него наносятся по истинным пеленгам и расстояниям. Между полученными точками проводится средняя прямая, направление которой принимается за путевой угол ПУa ; угол дрейфа вычисляется по формуле (165).
С планшета снимается также пройденное расстояние между крайними точками; делением его на соответствующий промежуток времени находится фактическая скорость корабля относительно водной среды Vоб . Потеря скорости от влияния ветра и волны находится по формуле (167).
Этот способ определения угла дрейфа и потери скорости является одним из наиболее точных; при должной тщательности наблюдений и прокладки он обеспечивает определение угла дрейфа со средней квадратической ошибкой 0,8—1,0°.
Если по каким-либо причинам измерить расстояния до вехи нельзя, можно ограничиться измерением одних только пеленгов. На каждом галсе пеленг на веху измеряется три раза через равные промежутки времени. Причем для большей точности желательно, чтобы первый пеленг был измерен, когда веха будет находиться на курсовом угле 30—40°, второй — когда она будет примерно на траверзе корабля, третий—когда курсовой угол на веху будет 140—150°. В момент каждого измерения замечается отсчет лага с точностью 0,01 мили.

Прокладка может выполняться на листе чистой бумаги. От произвольной точки О, изображающей веху, прокладываются линии пеленгов (рисунок слева). Задача заключается в нахождении такой прямой АС', на которой линии пеленгов отсекали бы отрезки, пропорциональные расстояниям, пройденным кораблем за промежутки времени между измерениями первого и второго, второго и третьего пеленгов.. На линии первого пеленга в расстоянии 10—15 см от точки О выбирается произвольная точка А; через нее проводится прямая, направление которой примерно параллельно линии курса корабля. От точки ее пересечения с линией второго пеленга, (точка В) откладывается отрезок ВС:
BC = (ол3 - ол2) / (ол2 - ол1)
Через полученную таким образом точку С проводится прямая, параллельная линии второго пеленга, до пересечения с линией третьего пеленга. Найденная при этом точка С' соединяется прямой линией с точкой A. Направление прямой АС' представляет собой искомый путевой угол ПУa. Угол дрейфа находится по формуле (165). Средняя квадратическая ошибка определения угла дрейфа этим способом обычно лежит в пределах 1,0—1.2°.
Результаты всех выполненных на корабле определений угла дрейфа и потери скорости от влияния ветра и волны сводятся в таблицу, в которой обязательно должны указываться дата наблюдений, курсовой угол и скорость кажущегося ветра, наблюденные значения утла дрейфа и потери скорости, а в примечании—способ их определения, данные о волнении моря, осадка корабля носом и кормой. В таблицу могут заноситься также данные об определении углов дрейфа и потери скорости, полученные с других однотипных кораблей; соответствующая пометка делается в примечании.
Учет течения
В неподвижной воде при отсутствии течения судно перемещается относительно береговых предметов с действительной, истинной скоростью. Если в данном районе есть течение, то оно непременно сносит судно с намеченного курса в сторону или вдоль курса. В этом случае прокладку ведут с учетом течения. Предположим, что судно идет со скоростью V T из точки А в точку В в районе с постоянным течением по истинному курсу АВ (рис. 45). Пока судно идет в точку В, течение снесет его в сторону и оно в действительности окажется в точке С. Угол между северной частью истинного меридиана и линией движения судна называют путевым углом ПУ, Разность между путевым углом ПУ и истинным курсом судна И К называется углом сноса и обозначается b . Угол сноса берется со знаком плюс, если течение слева, и со знаком минус, если течение справа. Очевидно, что
ПУ = UK ± b
Судоводителю-любителю при плавании на течении приходится решать графически две задачи.
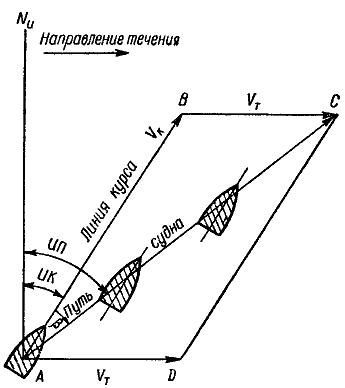
Задача 1. Известны ИК и b , требуется найти ПУ.
Решение. От начальной точки А прокладываем линию курса и в масштабе карты откладываем по ней расстояние АВ, проходимое судном за определенный промежуток времени (например, за час). Из полученной точки В в направлении течения откладываем снос течением ВС за тот же промежуток времени. Соединив точки Л и С, найдем ПУ судна.
Истинный путь, или расстояние АС, пройденное за выбранный промежуток времени, снимаем с карты. Как правило, истинный путь АС и истинная скорость судна при плавании на течении будут отличаться от пути по курсу АВ и от скорости относительно воды («скорость по лагу»).
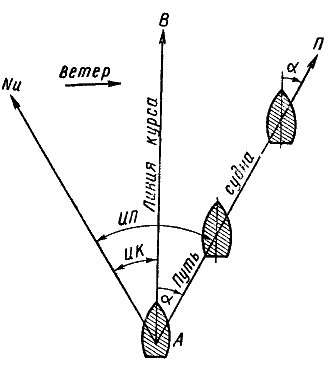
Задача 2. Известны ПУ и AD (путь течения за час), требуется найти ИК и угол сноса b .
Решение. От линии N И отложим ПУ, затем из точки А в направлении течения отложим путь течения за час AD = V Т , далее радиусом, численно равным лаговой скорости V K из точки D засекаем линию ПУ и получаем точку С. Соединив точки С и D , получим линию ИК, которую с помощью штурманской линейки перенесем в точку А и найдем ИК и b . Этим курсом ИК по направлению АВ должно идти судно, чтобы попасть из точки Л в точку С.
Морские течения бывают различных типов: постоянные, переменные, дрейфовые. Данные о течениях выбираются из руководств по мореплаванию. Плавание на течении является сложным плаванием и требует от судоводителя-любителя систематически и возможно чаще определять место судна в море.