

1-48 / 26. Датчики частоты вращения
.doc26. Датчики частоты вращения
Датчики частоты вращения служат для определения числа оборотов вала двигателя за единицу времени и применяются в регулируемых приводных системах.
Датчики частоты вращения используются в тахометрах - приборах, измеряющих частоту вращения или угловую скорость вращающихся деталей. Тахометры бывают магнитные, вибрационные, часовые интегрирующие, стробоскопические, электронные интегрирующие, магнитно-индукционные, магнитно-электрические, частотно-импульсные, ферродинамические и другие.
В промышленности в настоящее время широкое распространение получили магнитно-индукционные датчики частоты вращения (тахогенераторы), генерирующие электрические импульсы напряжения приблизительно синусоидальный формы. Частота этого сигнала пропорциональна частоте вращения вала двигателя, где установлен индуктор.
Конструкция и принцип действия бесконтактного магнитно-индукционного датчика частоты вращения
Пример конструкции датчика. Магнитно-индукционный датчик состоит из катушки индуктивности, внутри которой находится сердечник из мягкой стали, соединенный с постоянным магнитом. Стальной сердечник расположен через небольшой воздушный зазор прямо над кромкой ферромагнитного зубчатого кольца (зубчатки), находящегося в магнитном поле постоянного магнита. Если прямо напротив датчика попадает зуб кольца, то он концентрирует магнитное поле и усиливает поток магнитной индукции в катушке, а если напротив датчика становится выемка зубчатки, то магнитный поток ослабевает. Такие два состояния датчика постоянно чередуются при вращении импульсной зубчатки вместе с валом, частота вращения которого, собственно говоря, и является измеряемой характеристикой. В катушке наводятся импульсы напряжения переменного тока, частота которых свидетельствует о частоте вращения вала.
Назначение. Бесконтактные индуктивные датчики частоты вращения широко применяются для контроля и регистрации частоты вращения различных двигателей, в т.ч. на транспортных средствах.
Тахогенераторы
Типичный тахогенератор представляет собой электрическую машину малой мощности, которая преобразует механическое вращение в электрический сигнал. Конструкция асинхронного тахогенератора ничем не отличается от асинхронного двигателя с полым немагнитным ротором. Подобно двигателю, одна из обмоток статора подключается к сети переменного тока (обмотка возбуждения), а другая - генераторная обмотка - служит для снятия выходного напряжения. Обмотки асинхронного генератора расположены под углом 90º друг к другу. Мощность выходного сигнала тахогенератора может достигать нескольких ватт. Помимо асинхронных, выпускаются синхронные тахогенераторы и тахогенераторы постоянного тока.
Пример тахогенератора
Тахогенератор GT 3 пр-ва компании Huebner, Германия
Основные технические характеристики
В ыходное
напряжение: 5 мВ/об/мин
ыходное
напряжение: 5 мВ/об/мин
Температурный коэффициент: -0,035 %/ºС
неравномерность характеристики: не более 1,2 %
Постоянная времени: 2 мкс
Мощность: 0,025 Вт
Диапазон рабочих температур: от -30 ºС до +130 ºС
Диаметр полого вала: 6 мм
Наибольшая частота вращения: 10000 об/мин
Момент инерции: 9 гсм2
Масса ротора: прибл. 20 г
Диаметр корпуса: 34 мм
Класс защиты: IP00; IP54
Тахогенератор постоянного тока - это машина постоянного тока с независимым возбуждением или возбуждением постоянными магнитами, работающая в генераторном режиме. По конструкции он почти не отличается от машин постоянного тока.
Тахогенераторы постоянного тока служат для измерения частоты вращения по значению выходного напряжения, а также для получения электрических сигналов, пропорциональных частоте вращения вала в схемах автоматического регулирования.
Основными требованиями, предъявляемыми к тахогенераторам, являются: а) линейность выходной характеристики; б) большая крутизна выходной характеристики; в) малое влияние на выходную характеристику изменения температуры окружающей среды и нагрузки; г) минимум пульсаций напряжения на коллекторе.
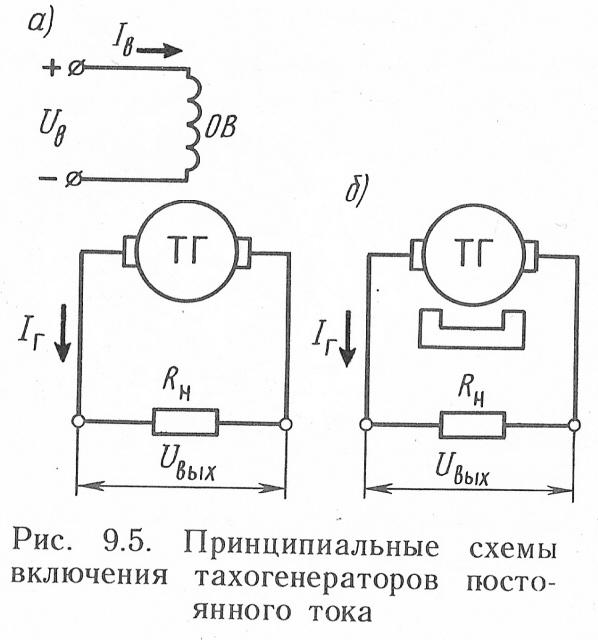
На. рис. 9.5 показаны принципиальные схемы тахогенераторов постоянного тока с электромагнитным возбуждением (а) и возбуждением постоянными магнитами (б).
![]() (1)
(1)
где rа - сопротивление обмотки якоря, Ом; Rн - внутреннее сопротивление прибора, подключенного к тахогенератору, Ом.
Из (1) следует, что чем больше сопротивление прибора Rн тем больше крутизна выходной характеристики Сu. Наибольшая крутизна у выходной характеристики, соответствующей режиму холостого хода тахогенератора, когда обмотка якоря разомкнута" (RH = ∞).
С ростом тока нагрузки (уменьшением RH) крутизна выходной характеристики уменьшается (рис. 9.6, а). У современных тахогенераторов постоянного тока Сu = (6÷260).10¯³В/(об/мин), что превышает крутизну асинхронных тахогенераторов.
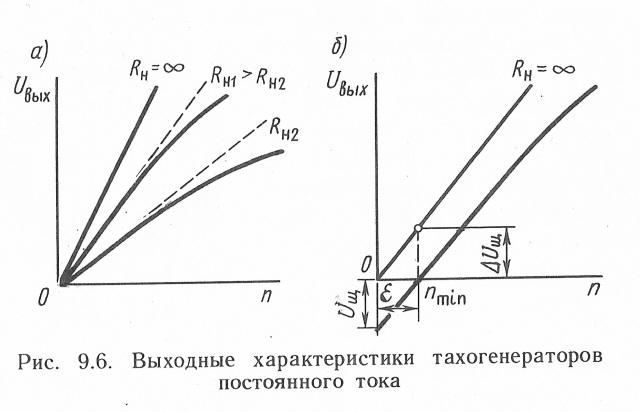
Выходная характеристика тахогенератора постоянного тока - прямая линия. Однако опыт показывает, что выходная характеристика прямолинейна только в начальной части (при малых относительных частотах вращения), а с ростом частоты вращения она становится криволинейной (рис. 9.6, а). Криволинейность характеристики усиливается при уменьшении сопротивления нагрузки RH и увеличении частоты вращения n. Это объясняется размагничивающим действием реакции якоря в тахогенераторе. Для уменьшения криволинейности выходной характеристики не следует использовать тахогенератор на его предельных частотах вращения и применять в качестве нагрузки приборы с малым внутренним сопротивлением.