

57. Автоматические швартовные лебедки
Автоматические швартовные лебедки предназначены для поддержания заданного уровня швартовного режима при необходимой безопасности стоянки судна и сохранности швартовных тросов. Изменение координат клюзов под действием внешних возмущений отражается на угле заводки канатов, что в принципе характеризует переход в новое состояние швартовного режима. В настоящее время нет единого подхода к определению критерия оптимизации швартовного режима, который позволил бы установить общую программу действия АШЛ для каждых конкретных условий швартовки. Поэтому общепринятым принципом автоматизации швартовных лебедок является стабилизация натяжения швартовных тросов на заданном уровне.
Лебедка стравливает трос при увеличении усилия на канате и подбирает слабину при уменьшении его натяжения. Особенность лебедки как системы автоматического регулирования заключается в том, что натяжение швартовного каната для нее является одновременно возмущающим фактором и регулируемым параметром. В этих условиях система остается разомкнутой по отношению к другим обобщенным координатам, что является ее существенным недостатком.
Внешними факторами, влияющими на положение углов заводки швартовных канатов, могут быть не только силы ветра, течения, волновые воздействия. Изменение координаты клюзов совершается и при нормальном цикле погрузочио-разгрузочных операций при шлюзовании, при стоянке в условиях приливов и отливов, когда уровень акватории колеблется в широких пределах. Отмечено, например, что при загрузке танкера вертикальное перемещение швартовного клюза происходит со скоростью 0,7—1 м./ч. При шлюзовании скорость поднятия и опускания уровня воды достигает 0,5—1 м/мин. Во всех этих условиях АШЛ освобождает палубную команду от постоянного наблюдения, перетяжек канатов, уменьшает трудозатраты на ведение швартовного режима.
Применение лебедок позволяет расширить диапазон использования стальных тросов, обладающих большой долговечностью, сравнительно с синтетическими и манильскими. Постоянная готовностьАШЛ, их достаточное количество на судне способствуют общему сокращению
продолжительности швартовных операций также в случаях, когда лебедки используются при ручном управлении.
Все множество автоматических швартовных лебедок, используемых на судах по принципу измерения усилия в швартовном канате, можно разделить на две основные разновидности: системы с датчиком натяжения и системы без датчика натяжения. Вид применяемой измерительной системы полностью определяет характер работы электропривода .
Системы ашл с датчиком натяжения
Для этих систем характерна прерывистая работа двигателя, который вводится в действие по программе, регламентированной датчиком натяжения. На судах используется несколько видов АШЛ, отличающихся принципом измерения тягового усилия.
Динамометрическая система с планетарной передачей (рис. 3.28)
Центральным элементом
измерительной системы является
планетарная передача в силовой цепи
редуктора между двигателем и грузовым
барабаном. Солнечное колесо передачи
1 связано с исполнительным двигателем
ИД. Водило 3 с закрепленными на нем
сателлитами 4 передает вращение на
барабан. При заторможенном двигателе
усилие па барабане через водило и
сателлиты передастся на венечную
шестерню 2, смещение которой вызывает
растяжение пружины динамометра 6. В
статическом состоянии пружина
уравновешивает силу Тв, приложенную к
водилу, эквивалентную натяжению
швартовного каната. Растяжение пружины
фиксируется указателем 8 и через шатун
7 передается на датчик тяговой силы 9.
Датчик содержит контактные элементы
управления магнитной станцией 11. Уставка
натяжения производится маховичком 10.
Отключение действительного у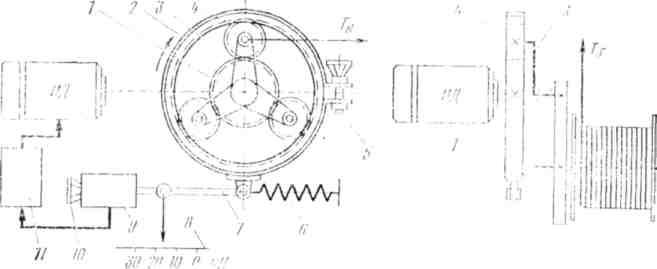 силия
от заданного вызывает дополнительное
перемещение штока датчика
натяжения, коммутацию его управляющих
элементов и включение
ИД в направлении, зависящем от знака
отклонения натяжения.Измеритель
рассматриваемого вида фактически
производит оценку момента
на водиле, который в принципе будет
несколько меньше, чем действительный
момент на грузовом барабане, возникающий
из-за натяжения
троса. Это отличие определяется потерями
в передаточном механизме от барабана
до планетарного редуктора.
силия
от заданного вызывает дополнительное
перемещение штока датчика
натяжения, коммутацию его управляющих
элементов и включение
ИД в направлении, зависящем от знака
отклонения натяжения.Измеритель
рассматриваемого вида фактически
производит оценку момента
на водиле, который в принципе будет
несколько меньше, чем действительный
момент на грузовом барабане, возникающий
из-за натяжения
троса. Это отличие определяется потерями
в передаточном механизме от барабана
до планетарного редуктора.
При ручном управлении лебедкой магнитная станция переключается на комаидоаппарат и взвешивающее устройство превращается в простой измеритель натяжения. Динамометрическая система имеет ленточный стопор 5.
Д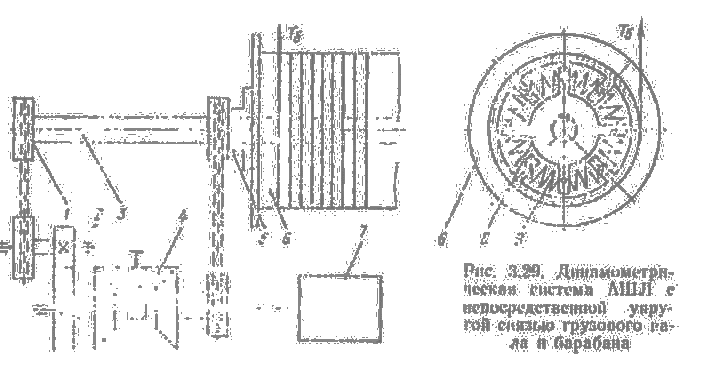 инамометрическая
система с непосредственной упругой
связью барабана и рабочего вала
(рис. 3.29) Здесь
барабан 6 имеет
свободную посадку относительно грузового
нала 3. Связь между ними осуществляется
посредством пружинных
растяжек 9 со
звездочкой 8,
встроенных
внутрь барабана. Если двигатель, а
следовательно, и грузовой вал заторможен,
то иод действием усилия на канате
барабан повернется относительно своего
вала на некоторый
угол, значение которого эквивалентно
натяжению. Этот угол фиксируется
датчиком тяговых усилий 7. Наличие
дифференциала 4
позволяет производить измерение усилия
и при работе двигателя. Промежуточная
механическая передача 2
с учетом
параметров цепных звездочек /, 5
позволяет
выбрать необходимый масштаб поворота
вала датчика.
инамометрическая
система с непосредственной упругой
связью барабана и рабочего вала
(рис. 3.29) Здесь
барабан 6 имеет
свободную посадку относительно грузового
нала 3. Связь между ними осуществляется
посредством пружинных
растяжек 9 со
звездочкой 8,
встроенных
внутрь барабана. Если двигатель, а
следовательно, и грузовой вал заторможен,
то иод действием усилия на канате
барабан повернется относительно своего
вала на некоторый
угол, значение которого эквивалентно
натяжению. Этот угол фиксируется
датчиком тяговых усилий 7. Наличие
дифференциала 4
позволяет производить измерение усилия
и при работе двигателя. Промежуточная
механическая передача 2
с учетом
параметров цепных звездочек /, 5
позволяет
выбрать необходимый масштаб поворота
вала датчика.
Для этой системы характерны наименьшие потери момента от барабана до измерители и повышенная точность оценки натяжения.
Магнитоупругие датчики. Работа этих датчиков основана на измерении магнитной проводимости ферромагнитных материалов под действием механических напряжений. Таким датчиком можно непосредственно измерять, момент на грузовом валу лебедки, используя его и качествс якоря магнитной системы магнитоупругого торсиометра. При достижении определенного усилия происходит направленное включение двигателя, который, имея жесткую механическую характеристику, работает с почти постоянной частотой вращения. Если натяжение увеличивается, датчик вводит вторую, повышенную ступень скорости.