

Попов / Попов билеты / 5
.docx§ 7.2. СИНУСНОКОСИНУСНЫЙ ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР
21.10.2010 18:20 Администратор
![]()
![]()
![]()
На
статоре синусно-косинусного вращающегося
трансформатора расположены обмотки В и К, а
на роторе — обмотки S и С (см. рис.
7.2).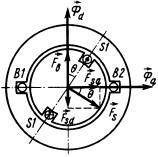
Выходные напряжения. При холостом ходе напряжения на синусной S и косинусной С обмотках ротора равны соответствующим ЭДС:
![]() (7.7)
(7.7)
|
Рис. 7.4. Векторная диаграмма МДС при подключении нагрузки к синусной обмотке
|
Если к синусной обмотке S подключить некоторую нагрузку ZHS, ТO ПО обмотке пойдет ток
Is = ES/(ZS + ZHS), (7.8)
где Zs—сопротивление обмотки S, которое считаем постоянным.
Ток Is создает МДС ротора Fs. Как видно из рис. 7.4, ось этой МДС совпадает с осью фазы S,поэтому ее можно представить в виде суммы двух составляющих: продольной FSd = Fssinθ и поперечной FSq = Fscosθ. Продольная составляющая FSd создает в обмотке возбуждения Вкомпенсирующий ток, МДС которого FB, так же как и в двух обмоточном трансформаторе, компенсирует действие FSd. Результирующий продольный поток Фd индуцирует ЭДС в обмотке S:
ESd = kEnsinθ. (7.9)
Поперечная составляющая FSq создает во вращающемся трансформаторе поперечный поток Φ , максимальное значение которого Фqm = Fscosθ/RMq, где RMq — магнитное сопротивление для поперечного потока.
Относительно поперечного потока Фq обмотка S является косинусной и, следовательно, в ней индуцируется ЭДС
![]() (7.10)
(7.10)
где![]() —постоянный
коэффициент.
—постоянный
коэффициент.
Таким образом, при нагрузке в синусной обмотке кроме требуемой ЭДС ESd,пропорциональной синусу угла поворота θ, индуцируется ЭДС ESd, пропорциональная току нагрузки и квадрату косинуса θ. Эта добавочная составляющая ЭДС вызывает появление погрешностей.
Электродвижущая
сила ESq является
ЭДС самоиндукции и может быть
представлена в виде где Esomax =
kEв —
максимальное значение напряжения ![]() so.
so.
![]()
где —индуктивное
сопротивление обмотки ротора,
обусловленное потоком Фq.![]()
Результирующая ЭДС, индуктированная в синусной обмотке, с учетом (7.10) и (7.11)
![]() (7.12)
(7.12)
Решим уравнение (7.12) относительно Es:

(7.13)
где —
некоторый комплексный
коэффициент.
![]()
![]()
Таким образом, при наличии тока нагрузки Is нарушается требуемая синусоидальная зависимость изменения ЭДС Es, а следовательно, и выходного напряжения Us от угла поворота ротора θ и возникает определенная погрешность. Относительная погрешность вращающегося трансформатора для синусной обмотки
|
Рис. 7.5. Зависимость выходного напряжения в синусной обмотке Us и погрешности ΔUS от угла поворота ротора |
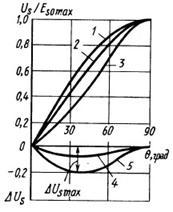
На рис. 7.5 показаны зависимости Us = f(θ) в относительных единицах при холостом ходе (кривая 1) и при нагрузке (кривые 2 и 3), построенные по формулам (1.7) и (7.13). При этом кривые 2 и 3 соответствуют значениям As, равным 0,25 и 1. Из этих кривых следует, что при нагрузке погрешность вращающегося трансформатора может быть весьма значительной. Зависимости амплитудной погрешности ΔUS от угла поворота θ для указанных значений As изображены на рис. 7.5 кривыми
|
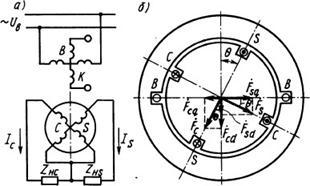
РИС. 7.6. СХЕМА СИНУСНО-КОСИНУСНОГО ТРАНСФОРМАТОРА СО вторичным симметрированием (а) и диаграмма МДС, создаваемых обмотками ротора (б) |
4 и 5. Из (7.14) следует, что погрешность ΔUS достигает максимального значения при углах θ, равных 35° 16', 144° 44' и 215° 16'.
В косинусной обмотке при нагрузке ЭДС также изменяется под влиянием поперечного потока. В результате этого
![]()
где ![]() =j/X2q/(Zc + ZHC); ZC + ZHC —
сопротивления косинусной обмотки и
подключенной к ней нагрузки.
=j/X2q/(Zc + ZHC); ZC + ZHC —
сопротивления косинусной обмотки и
подключенной к ней нагрузки.
Для устранения погрешности вращающегося трансформатора, обусловленной поперечным потоком Фq, применяют так называемое симметрирование трансформатора, т. е. компенсацию поперечного потока ротора. Существует два способа симметрирования: вторичное (со стороны ротора) и первичное (со стороны статора).
Вторичное симметрирование. Для уменьшения погрешности выходного напряжения, снимаемого с синусной обмотки, подключают к косинусной обмотке сопротивление ZHC (рис. 7.6,а). В этом случае ток, проходящий по обмотке C, создает МДС Fc, которую можно представить, так же как и МДС Fs, в виде векторной суммы двух составляющих (рис. 7.6,б): продольной FCd —Fccosθ и поперечной FCq = = Fcsinθ. Продольная составляющая FCd совпадает по направлению сFsd, а поперечная Fc направлена против FSq. При Fcq=FSq поперечный поток Фq=0. Следовательно, не возникает и погрешность, обусловленная этим потоком.
Сопротивление ZHC, при котором обеспечено полное симметрирование, можно определить из условия
Fscosθ=Fcsinθ (7.16)

|
Рис. 7.7. Схемы синусно-косинусных вращающихся трансформаторов (а, б) |
или, с учетом значений Fs и Fc,
ZS + ZHS = ZC + ZHC, (7.17)
т. е. полное симметрирование наблюдается при равенстве комплексных сопротивлений в цепи обмоток S и С ротора, т. е. их активных и реактивных составляющих.
При вторичном симметрировании компенсируются МДС по поперечной оси; кроме того, токIв в обмотке возбуждения поворотного трансформатора не зависит от угла поворота, так как в формулу для результирующей продольной составляющей МДС ротора F2d = FSd + FCd(определяющей силу тока Iв) не входит какая-либо функция угла θ:

где z2 =zS =zс; ZH = ZHS = ZHC.
В результате уменьшается погрешность поворотного трансформатора.
Рассмотренный метод симметрирования практически применим только при постоянном сопротивлении нагрузки, что является его недостатком.
Первичное симметрирование. Для уменьшения погрешности выходного напряжения, снимаемого, например, с обмотки S (рис. 7.7, а), компенсационную обмотку К статора замыкают на какое-либо малое сопротивление Ζκ или накоротко. В этом случае по поперечной оси вращающегося трансформатора действует результирующая МДС
Fq = FSq + FK, (7.18)
где FK — МДС, создаваемая компенсационной обмоткой.
Так
как обмотка К относительно
поперечного потока Фq представляет
собой замкнутую накоротко вторичную
обмотку трансформатора, то ее
МДС ![]() к направлена
против МДС
к направлена
против МДС ![]() Sqпервичной
обмотки и результирующая МДС Fq, так
же как и в трансформаторе тока, значительно
меньше МДС FSq. Поэтому
поперечный поток Фq и
вызванная им погрешность резко
уменьшаются. При изменении нагрузки,
подключенной к обмотке ротора,
МДС FK изменяется
примерно пропорционально
МДС FSq, вследствие
чего степень компенсации поперечного
потока остается практически неизменной.
Это достоинство данного метода
симметрирования. Однако при повороте
ротора изменяется ток Iв в
обмотке возбуждения и при заданном
напряжении
Sqпервичной
обмотки и результирующая МДС Fq, так
же как и в трансформаторе тока, значительно
меньше МДС FSq. Поэтому
поперечный поток Фq и
вызванная им погрешность резко
уменьшаются. При изменении нагрузки,
подключенной к обмотке ротора,
МДС FK изменяется
примерно пропорционально
МДС FSq, вследствие
чего степень компенсации поперечного
потока остается практически неизменной.
Это достоинство данного метода
симметрирования. Однако при повороте
ротора изменяется ток Iв в
обмотке возбуждения и при заданном
напряжении ![]() в из-за
падения напряжения в этой обмотке
изменяется ЭДС
в из-за
падения напряжения в этой обмотке
изменяется ЭДС ![]() в.
В результате появляется дополнительная
погрешность в значении выходных
напряжений
в.
В результате появляется дополнительная
погрешность в значении выходных
напряжений ![]() на
зажимах синусной и косинусной обмоток.
Поэтому во
вращающихся трансформаторах обычно
применяют одновременно первичное
и вторичное симметрирование (рис.
7.7, б).
на
зажимах синусной и косинусной обмоток.
Поэтому во
вращающихся трансформаторах обычно
применяют одновременно первичное
и вторичное симметрирование (рис.
7.7, б).
Рассмотренные методы компенсации поперечного потока Фд позволяют использовать в качестве выходной как синусную, так и косинусную обмотки. Поэтому вращающийся трансформатор, включенный по схеме, изображенной на рис. 7.7,б, называют синусно-косинусным.