

Розанов учебник(ЭЭА) / GLAVA_12
.pdfГл. 12. Статические коммутационные аппараты и регуляторы переменного тока
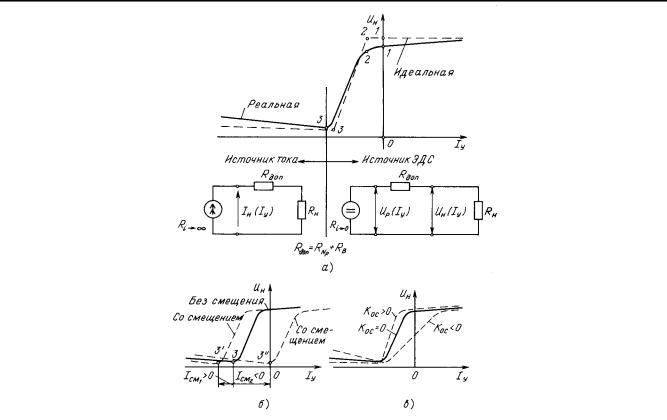
Рис. 12.24. К пояснению принципа действия магнитного ключа: a – идеализированная прямоугольная петля гистерезиса; á – иллюстрация разомкнутого и замкнутого состояний ключа; â – форма тока на активной нагрузке в схеме с магнитным ключом
Рис. 12.25. Влияние среднего значения E и частоты f питающего напряжения на выходные параметры цепи с дросселем насыщения: a – влияние напряжения E; á – влияние частоты f питающего напряжения
В то время, когда материал магнитопровода оказывается в насыщенном состоянии, динамическая магнитная проницаемость снижается, приближаясь к нулю. Это ведет к резкому уменьшению индуктивного сопротивления XL дросселя.
Следовательно, насыщенный дроссель подобен замкнутому ключу: напряжение на нем практически не падает и целиком от источника поступает к нагрузке (на рис. 12.24,á выделено штриховой линией с положительным наклоном). В результате изложенного по цепи потечет ток ií (ðèñ. 12.24,â), обусловленный значением сопротивления Rí. Поскольку это сопротивление активное, то и ток в цепи будет чисто активным, полностью повторяющим по форме напряжение на нагрузке, фазовый сдвиг между током и напряжением равен нулю.
Зависимости средних значений напряжений на нагрузке и на дросселе и тока нагрузки в функции среднего напряжения питания показаны на рис. 12.25,à; зависимость тех же величин от частоты f питающего напряжения показана на рис. 12.25,á; частота fS насыщения в зависимости от
приложенного напряжения E определяется равенством
fs = |
E |
. |
|
4NpSBS |
|||
|
|
Из рис. 12.25 видно, что ДН без подмагничивания может быть использован как сигнализатор (дат- чик, фиксатор) определенного значения среднего питающего напряжения (при f = const) или частоты напряжения питания (при E = const).
12.3.3. ДРОССЕЛЬ НАСЫЩЕНИЯ С ПОДМАГНИЧИВАНИЕМ
В отличие от рассмотренного выше дроссель насыщения с подмагничиванием характеризуется тем, что хотя бы по одной из его обмоток протекает постоянный ток, или его магнитопровод подмагни- чивается полем внешнего постоянного магнита. Эти дроссели насыщения с подмагничиванием используются в качестве измерительных трансформаторов постоянного тока и напряжения, стабилиза-
торов тока, регулируемых трансформаторов, формирователей импульсов, датчиков напряжения и тока и т. п.
Схема простейшего дросселя насыщения с подмагничиванием показана на рис. 12.23,á.
На ферромагнитном магнитопроводе (см. рис. 12.23,á) располагаются две обмотки. Обмотка Np, как и ранее, включается последовательно с сопро-
330

§ 12.3. Электромагнитные управляемые компоненты
тивлением нагрузки Rí к источнику переменной ЭДС e, периодически изменяющейся во времени. Эта обмотка обычно называется рабочей, как и сама цепь, в которую она включена.
Вторая обмотка с числом витков Nó соединяется последовательно с большим балластным сопротивлением Zá и подключается к источнику постоянного напряжения Eó. Эта обмотка называется обмоткой управления (или управляющей). Цепь, содержащая обмотку Nó, называется цепью управления. Отличие ДН с подмагничиванием от ДН без подмагничивания легко усмотреть, сравнивая рис. 12.23,à è 12.23,á: в ДН без подмагничивания магнитное состояние магнитопровода зависит лишь от приложенного напряжения e сети и ее частоты f, а в ДН с подмагничиванием – еще и от тока Ió управления.
ÌÄÑ Fð, создаваемая рабочей обмоткой, уравновешивается МДС Fï перемагничивания магнитопровода и МДС Fó обмотки управления, т.е.
Fp = Fï + Fó .
Поскольку для изготовления магнитопроводов ДН с подмагничиванием используются материалы, обладающие узкой петлей гистерезиса, у которых коэрцитивная сила, Hc → 0 то можно считать, что и МДС Fï ≈ Hc lì, ãäå lì – средняя длина линии
магнитной индукции в магнитопроводе, также практически равна нулю. В итоге можно получить основополагающее соотношение для ДН с подмагничиванием:
Fp = Fó .
Это соотношение иногда называют законом равенства МДС рабочей обмотки и обмотки управления. Это равенство соблюдается при любой форме входного сигнала, если только МДС выражаются в средних значениях.
Следует добавить, что работа ДН с подмагничи- ванием не нарушится, если обмотка управления будет питаться переменным током, частота которого во много (в 10 и более) раз меньше частоты тока в рабочей обмотке.
Магнитные свойства магнитопровода, на котором размещены обмотки Nó è Np, резко нелинейно зависят от тока управления (подмагничивания). Незначительные изменения тока Ió цепи управления вызывают существенные изменения магнитного состояния сердечника и, как следствие, тока Ip рабочей цепи.
Поскольку при помощи малых мощностей входной цепи управления удается управлять большими мощностями на выходе, в цепи нагрузки (рабочей цепи), то рассматриваемые устройства получили
Рис. 12.26. Характеристика управления дроссельного магнитного усилителя:
à – без смещения и обратной связи (исходная); á – со смещением; â è ã – с обратной связью, без смещения; ä – с обратной связью и смещением
331

Гл. 12. Статические коммутационные аппараты и регуляторы переменного тока
названия дроссельных магнитных усилителей (ДМУ). Дроссельный магнитный усилитель может иметь не одну, а несколько гальванически развязанных обмоток управления. Это позволяет суммировать сигналы, менять характеристику управления ДМУ и ее расположение в осях Ií(Ió) (см. рис. 12.26) и полу- чать практически любые коэффициенты усиления и возврата kâ, если ДМУ работает в релейном режиме.
Большое балластное сопротивление Zá â öåïè
управления (см. рис. 12.23,á) необходимо для уменьшения переменной составляющей тока, которая может появиться в цепи управления за счет трансформации переменного напряжения из рабо- чей (первичной) цепи.
Åñëè Zá отсутствует или очень мало, то независимо от тока подмагничивания по цепи нагрузки будет идти ток, определяемый, в основном, сопротивлением нагрузки Rí; дроссель не будет управлять током и мощностью в нагрузке. Для нормальной работы устройства необходимо, чтобы цепь управления являлась цепью ”источника тока”, в которой ток однозначно определяется напряжением управления Eó и не зависит от магнитного состояния дросселя.
Наличие Zá ухудшает показатели схемы. Если Zá – чисто активное сопротивление, то потери мощности в нем будут соизмеримы с полезной мощностью в нагрузке. Если же Zá представляет собой линейный дроссель (Zá ≈ ω Lá ), то его габаритные размеры будут соизмеримы с основным, насыщающимся дросселем.
Поэтому на практике обычно используются схемы на двух одинаковых ДН с подмагничиванием (см рис. 12.23,â). В них для устранения трансформации переменного тока из рабочей цепи в цепь управления используется последовательное согласное соединение обмоток Nó и последовательное встречное соединение рабочих обмоток Np двух дросселей. При идентичных магнитопроводах и указанном включении обмоток ЭДС основной частоты, трансформируемые из рабочей цепи в цепь управления, оказываются в противофазе и взаимно компенсируют друг друга.
Будем считать, что:
–магнитопроводы дросселей выполнены из материала с идеальной прямоугольной петлей гистерезиса;
–магнитопроводы дросселей TS1 è TS2 идентичны;
–потери в магнитопроводах отсутствуют;
–нагрузка активная;
– напряжение |
питания синусоидально |
(e = |
= Emax sin(ω t); ω = |
2π f) и среднее значение E < |
2Es, |
ãäå Es = 4fNpSBs.
Характеристика управления дроссельного магнитного усилителя. Зависимость тока нагрузки Ií (или рабочего тока Ip) от тока управления Ió в статическом, установившемся режиме представляет собой характеристику управления ДМУ. Очень удобно эту характеристику представлять не в функции реального тока управления, а как зависимость от приведенного к рабочей цепи тока управления
Ió′ = IóNó ⁄ Np.
При указанных выше допущениях характеристика управления ДМУ имеет вид, показанный на рис. 12.26,à. Характеристика симметрична относительно оси ординат, поэтому нередко изображают лишь одну половину характеристики управления.
При токе управления Ió = 0 (èëè Eó = 0) магнитопроводы дросселей не насыщены, напряжение питания оказывается приложенным к их рабочим обмоткам, ток в рабочей цепи Ip = 0 (точка 0 на характеристике управления) – режим холостого хода.
Ïðè |
Ió′ = IóNó ⁄ Np < I ′ó max = Ip max = E ⁄ Rp èëè |
||||
(0 < Eó < |
< E |
Ró |
|
Np |
) наступает рабочий режим ДМУ |
R |
N |
||||
|
|
p |
ó |
|
|
(участок от точки 0 до точки 1). В этом режиме за счет постоянного напряжения управления Eó в магнитопроводах дросселей появляется постоянная составляющая индукции, пропорциональная напряжению Eó. Для рабочего режима работы ДМУ справедлив закон равенства средних значений МДС: Fp – МДС рабочей цепи; Fó – МДС цепи управления
Fp = Fó ,
что равносильно
IpNp = IóNó
èëè
Ip = Ió′.
Если характеристика управления построена в координатах [Ió′, Ip], то при равных масштабах токов по указанным осям рабочий участок характеристики управления располагается под углом 45° к любой из осей (до точки 1 или точки 2). Левее точки 1 (при отрицательных значениях токов управления) и правее точки 2 (при положительных значениях токов управления) характеристика имеет горизонтальные участки, свидетельствующие о неизменности тока в рабочей цепи в этом режиме. Этот режим называется режимом максимальной отдачи. Он наступает при
332

§ 12.3. Электромагнитные управляемые компоненты
Ió′ |
= |
Ió |
Nó |
|
= |
Eó |
|
Nó |
|
≥ Ip max = |
E |
N |
R |
N |
R |
||||||||
|
|
|
p |
ó |
|
p |
í |
||||
(èëè Eó ≥ ERó Np ).
Rp Nó
На этом участке ток в нагрузке синусоидальный, если она включена без вентилей (см. рис. 12.23,â)
или же двухполупериодный выпрямленный – при наличии вентилей. Точки 1 èëè 2 на характеристике управления являются граничными между рабочим режимом и режимом максимальной отдачи. Ток
управления для этих |
точек обозначается как |
I ′ó max. Он равен I ′ó max = |
Ió maxNó ⁄ Np = Ip max . |
12.3.4. ДРОССЕЛИ НАСЫЩЕНИЯ С САМОПОДМАГНИЧИВАНИЕМ
Отличительной чертой дросселей насыщения с самоподмагничиванием является то, что в цепи их рабочих обмоток включаются вентили (например, рис. 12.27). Благодаря этому по рабочим обмоткам протекает только однополупериодный выпрямленный ток.
Постоянная составляющая тока в рабочих обмотках, даже при отсутствии тока управления, подмагничивает магнитопроводы дросселей насыщения. По этой причине указанные дроссели получили название дросселей (магнитных усилителей) с самоподмагничиванием (МУС). Поскольку для изготовления магнитопроводов используется материал с узкой петлей гистерезиса и высокой прямоугольностью, то после одного или нескольких полупериодов рабочего напряжения материал дросселей входит в насыщение. По этой причине такие устройства называются иногда магнитными усилителями с самонасыщением.
Изменение тока Ió цепи управления вызывает изменение суммарного подмагничивания магнитопроводов, их магнитного состояния и, как следствие, тока Ip рабочей цепи и напряжения Uí на нагрузке.
Если учесть то, что постоянная составляющая выходного тока нагрузки так же, как и входной ток управления, подмагничивает магнитопроводы дросселей, то по своему действию она эквивалентна обратной связи. На этом основании МУС иногда называют еще магнитным усилителем с положительной внутренней обратной связью.
МУС могут быть построены на одном магнитопроводе или на двух. По тем же причинам, о которых говорилось в параграфе, посвященном ДМУ, чаще используются двухполупериодные схемы МУС на двух магнитопроводах.
На практике магнитные усилители могут иметь не одну, а несколько обмоток управления (любые обмотки, кроме рабочей). Обычно различают (используют) следующие виды обмоток:
–обмотки управления с числом витков Nó;
–обмотки смещения с числом витков Nñì;
–обмотки обратной связи с числом витков Nîñ;
–дополнительные обмотки с числом витков Näîï.
Использование нескольких обмоток управления позволяет управлять магнитными усилителями от разных источников, производить суммирование сигналов, получать логические элементы, а главное, воздействовать на положение характеристики управления и ее крутизну. Чем круче характеристика управления, тем выше коэффициенты усиления тока, напряжения и мощности. Действие любой из дополнительных обмоток управления можно привести к действию исходной обмотки управления. Такое приведение основано на использовании закона равенства МДС, созданных двумя обмотками
управления, Fó1 = Fó2 èëè Ió1Nó1 = Ió2Nó2.
При одновременном включении нескольких обмоток управления результирующее воздействие может проявляться по-разному.
Основные схемы МУС показаны на рис. 12.27. В трансформаторной (рис. 12.27,à) и мостовой (рис. 12.27,á) схемах обеспечивается двухполупериодный постоянный выпрямленный ток в сопротивлении нагрузки, а в дифференциальной схеме (рис. 12,27,â) – переменный ток. На рис. 12.27,ã показан пример двухполупериодного однообмоточного МУС, выполненного на двух однотипных магнитопроводах. В таких МУС (см. рис. 12.28) роль рабочей обмотки, обмотки управления, обмотки смещения и обмотки обратной связи играет одна и та же обмотка. Такие устройства называются однообмоточными МУС или управляемыми магнитными клю- чами (МК) [94]. Как и в других магнитных усилителях, в них путем изменения тока управления легко удается менять состояние ключа, переводя его из закрытого состояния в открытое, и наоборот.
Схема с МК при соответствующем включении диодов и сопротивления нагрузки Rí позволяет обеспечить протекание по последнему как постоянного, так и переменного тока.
Для пояснения работы МК необходимо рассмотреть основную, базовую схему однополупериодного однообмоточного магнитного усилителя (см. рис. 12.29). Схема содержит дроссель насыщения TS, вентили VD1 è VD2, сглаживающий LôCô – фильтр и сопротивление нагрузки Rí. Кроме того в схеме имеется вентиль обратного включения VD0. Òîê Ió, протекающий через вентиль VD2, зависит от
333

Гл. 12. Статические коммутационные аппараты и регуляторы переменного тока
Рис. 12.27. Схемы магнитных усилителей с самоподмагничиванием:
à – трансформаторная; á – мостовая; â – дифференциальная; ã – однообмоточная
Рис. 12.28. Принципиальная схема двухполупериодного магнит- |
Рис. 12.29. К пояснению принципа действия магнитного ключа |
ного ключа на базе однообмоточного магнитного усилителя |
|
сопротивления Róý управляющего элемента (УЭ). УЭ меняет свое сопротивление под действием сигнала eó, поступающего от системы управления (СУ). Работу схемы легче понять, если рассмотреть характерные ее режимы работы, условно представленные на рис. 12.30. Схема получает питание от источника знакопеременного напряжения e(t). Для простоты примем, что напряжение питания имеет прямоугольную форму, как показано на рис. 12.30,â. В дальнейшем будем называть рабочим полупериодом такой полуперид питающего напряжения, при котором ток Ií проходит от источника питания через МК TS, рабочий вентиль VD1 и сопротивление нагрузки Rí. Другой полупериод, в течение которого вентиль VD1 под действием напряжения питания
закрыт, будем называть управляющим полупериодом. Указанные полупериоды на диаграмме (рис. 12.30,â) обозначены буквами Р (рабочий) и У (управляющий).
Для нормального функционирования схемы необходимо так подобрать параметры дросселя TS (его материал с определенной индукцией насыщения BS и поперечное сечение, а также число витков N обмотки), чтобы соблюдалось основное равенство (12.24):
E = ES = 4NSBS ⁄ T,
ãäå E – среднее за полпериода значение питающего напряжения e(t); ES – напряжение насыщения; S – активная площадь поперечного сечения магнито-
334

§ 12.3. Электромагнитные управляемые компоненты
провода (S = kçñ Sã, здесь kçñ = 0,85–0,93 – коэффициент заполнения по стали; Sã – реальная, геометрическая площадь поперечного сечения магнитопровода); T – период питающего напряжения.
Представим, что после включения схемы в работу все переходные процессы давно завершились, и в схеме наступил квазиустановившийся режим. Начнем рассмотрение работы схемы с мгновения, когда управляющий полупериод почти полностью закончился и напряжение e(t) из точки 1 (ñì. ðèñ.12.30,â) устремляется в точку 2, меняя свою полярность на обратную и переходя от значения –E к значению +E. Кроме того будем считать, что в этот момент магнитопровод дросселя TS находился в точке 1 (ñì. ðèñ. 12.30,á) в состоянии отрицательного насыщения –BS. Рассматриваемому режиму будет соответствовать схема замещения, представленная на рис. 12.30,à. Под действием приложенного напряжения рабочий вентиль VD1 закрыт и представляет собой разомкнутый ключ; управляющий же вентиль VD2 находится в открытом состоянии и представляет собой замкнутый ключ, через который при определенных условиях
может протекать ток iVD2 = Ió. Поскольку под действием изменяющегося от –E äî +E напряжения
e(t) происходит перемагничивание магнитопровода из точки 1 в точку 2 (ñì. ðèñ. 12.30,á), то в этом режиме ток через магнитный ключ TS протекать не может (см. рис. 12.24), TS в этом случае представляет собой разомкнутый ключ. Таким образом, в рассматриваемом режиме работы ток нигде не протекает: через нагрузку он не течет так как закрыт рабочий вентиль VD1, а через управляющий вентиль VD2 (хотя он и замкнут) ток не течет, так как разомкнут магнитный ключ TS. В рассматриваемом режимеUí = 0.
После того, как произошло перемагничивание магнитопровода TS, наступает второй режим работы МК. Схема замещения этого режима изображена на рис. 12.30,ã. Для второго режима характерно то, что при изменившейся полярности питающего напряжения магнитопровод TS находится в насыщенном состоянии (рис. 12.30,ä), и рабочая точка под действием рабочего полупериода Р приложенного напряжения e(t) перемещается по горизонтальному участку идеальной петли гистерезиса B(H) из точки 2 в точку 3. При указанных условиях отсутствует изменение индукции в магнитопроводе МК. Это соответствует замкнутому состоянию МК. Вентиль VD1 также представляет замкнутый ключ, так как он открыт под действием приложенной положительной полуволны питающего напряжения. Все напряжение сети практически полностью прикладывается к сопротивлению нагрузки
U = η |
|
kñõ E; |
|
|
||||
η = |
Rí |
= |
|
Rí |
|
, |
||
R |
ð |
|
|
(R + |
r ) |
|||
|
|
|
|
|
||||
|
|
|
|
í |
ä |
|
||
где η – коэффициент, учитывающий не полную передачу напряжения от источника к сопротивлению нагрузки; kñõ – коэффициент схемы (для однополупериодных схем kñõ = 0,5; для двухполупериодных – kñõ = 1); Rð = Rí + rä – полное сопротивление рабочей цепи; rä = RN +Rïð + RÂ – полное сопротивление рабочей цепи за вычетом сопротивления нагрузки, где, в свою очередь, RN, Rïð, RÂ – соответственно сопротивление рабочей обмотки, сопротивление соединительных проводов, сопротивление вентилей в рабочей цепи.
По окончании рабочего полупериода, к моменту перехода питающего напряжения через нуль, рабо- чая точка в координатах B(H) – ñì. ðèñ. 12.30,ä – возвращается в точку 2.
В следующий, управляющий полупериод, если сопротивление Róý управляющего элемента принять бесконечным, а ток Ió = 0, то индукция в магнитопроводе МК не изменится, рабочая точка останется в положении 2. È õîòÿ TS остается в насыщенном состоянии (МК замкнут), ток в рабочей цепи протекать не может, так как вентиль VD1 оказывается запертым отрицательным напряжением сети. В токе нагрузке наблюдается пауза длительностью
полпериода , от T äî 32T (ñì. ðèñ. 12.30,å). С началом нового рабочего полупериода, в интервале от 32T äî
2T, рабочая точка в координатах B(H) вновь перемещается из положения 2 в положение 3, вентиль VD1 открыт, и опять по цепи нагрузки протекает ток
Ií = |
Uí |
= |
|
E |
|
. |
R |
(R |
+ |
r ) |
|||
|
í |
í |
|
ä |
|
|
В дальнейшем, если цепь управления разомкнута, Ió = 0 (ñì. ðèñ. 12.30,ã), то все процессы будут повторяться. На сопротивлении нагрузки будет наблюдаться наибольшее возможное среднее напряжение, наступит режим максимальной отдачи (максимальной мощности и тока в нагрузке).
Если за счет системы управления обеспечить в управляющий полупериод питающего напряжения протекание некоторого тока Ió ≠ 0 по контуру источник – Róý-VD2-TS, то именно в этот полупериод будет происходить некоторое размагничивание магнитопровода, пропорциональное току управления. Тогда в управляющий полупериод индукция в магнитопроводе МК снизится на некоторое значение Âó, и рабочая точка из положения 2 с индукцией +ÂS переместится в точку 4 (см. рис.
335

Гл. 12. Статические коммутационные аппараты и регуляторы переменного тока
Рис. 12.30. Диаграммы состояния магнитного ключа
12.30,ç). Вследствие этого в очередной рабочий полупериод под действием изменившейся полярности питающего напряжения рабочая точка на- чнет перемещаться по петле гистерезиса из положения 4 в точку 6. На начальном участке указанного перемещения рабочая точка двигается вверх до положения 5 (ñì. ðèñ. 12.30,ç). На этом участке петли гистерезиса динамическая магнитная проницаемость µ ä → ∞ , что соответствует разомкнутому состоянию МК (см. рис. 12.24). Ток по рабочей цепи, даже в рабочий полупериод, в течение како- го-то интервала времени протекать не может. Спустя некоторое время tS насыщения, как только рабочая точка достигнет положения 5 (точка 5 совпадает с точкой 2), произойдет насыщение TS и он будет представлять замкнутый ключ. Тотчас через него потечет ток нагрузки, который будет протекать в течение оставшейся части рабочего интервала, в течение рабочего времени
tð = T2 − tç. Здесь tç – время задержки, равное времени
насыщения tS. Время протекания рабочего тока соответствует на диаграммах (см. рис. 12.30,ç è ðèñ. 12.30,è) участкам между точками 5 è 6. Точка 6 íà ðèñ. 12.30,ç находится левее точки 3. Среднее выходное напряжение Uí рабочего режима равно
|
E − |
2NS ∆ B (H ) |
||
Uí = η |
kñõ |
|
ó |
, |
|
T |
|||
|
|
|
||
ãäå ∆ B (Hó) – изменение индукции от приложенной напряженности магнитного поля управления. Зна- чение ∆ B (Hó) выбирается по соответствующим динамическим кривым размагничивания, снятым для различных материалов, на разных частотах при неизменной толщине ленты, из которой навит магнитопровод МУС [92, 93].
Чем сильнее размагничивающее действие тока Ió управления, чем больше размагничивающая индукция Âó, тем ближе к точке 2 находится точка 6. Чем дальше она отстоит от точки 3, тем меньше времени протекает ток нагрузки, тем меньше среднее выходное напряжение Uí. В итоге, при определенном значении тока управления Ió, равном току
IS = ES насыщения МК, наступает режим, при ко-
Rí
тором время задержки составляет полпериода питающего напряжения. Это значит, что рабочая точка в управляющий полупериод будет перемещаться по петле гистерезиса (см. рис. 12.30,ç) из положения 2 в положение 1, а в рабочий полупериод – из положения 1 в положение 2, никогда не заходя на горизонтальные участки петли гистерезиса, т. е. МК всегда будет разомкнут, наступит режим минимальной отдачи или холостого хода. Характеристика, соответствующая этому режиму, показана на рис. 12.30,ê. При любых иных токах управления
336
§ 12.3. Электромагнитные управляемые компоненты
Рис. 12.31. Характеристики управления магнитного усилителя с самоподмагничиванием: a – исходная; á – со смещением; â – с обратной связью
Ió = iVD2 = iVD1, причем iVD1 = Ií < IS, будет сохраняться режим минимальной отдачи, хотя рабочая точка в этом случае в координатах B(H) будет совершать периодические колебания по вертикальной части петли гистерезиса с меньшей амплитудой.
Работа двухполупериодных МК (рис. 12.27,ã и рис. 12.28) ничем не отличается от рассмотренного однополупериодного ключа, с той лишь оговоркой, что рабочий полупериод для TS1 является управляющим для TS2, и наоборот. В итоге средние значения напряжения и тока нагрузки возрастают
â2 раза, а отдаваемая в нагрузку мощность – в 4 раза. Таким образом, двухполупериодные ключи
â2 раза более эффективны по сравнению с однополупериодными.
Многообмоточные МУС работают на том же принципе, что и однообмоточные, но у них разнесены все обмотки. Поэтому при анализе и расчете необходимо конкретизировать, о какой говорится обмотке, и точно указывать ее число витков.
Характеристика управления МУС. Она представляет собой зависимость какого-либо выходного параметра (среднего за период выходного напряжения Up; среднего за период напряжения на нагрузке
Uí или среднего тока нагрузки Ií) от входного параметра – тока управления Ió. Характеристика имеет вид, представленный на рис. 12.31,a (сплошная линия – реальная; штриховая для магнитопроводов с прямоугольной петлей гистерезиса).
В МУС при токе управления Ió = 0 наблюдается практически режим максимальной отдачи. Это объясняется тем, что за счет постоянной составляющей тока рабочей цепи магнитопровод достигает насыщения. Последнее особенно справедливо для магнитопроводов с прямоугольной динамической петлей гистерезиса. Поэтому подача в обмотку управления положительного сигнала, действие которого направлено на подмагничивание магнитопровода, не может существенно сказаться на изменении магнитного состояния магнитопровода и выходного напряжения на нагрузке (участок характеристики, лежащей правее точки 1 íà ðèñ. 12.31,à; соответствующие точки реальной и идеальной характеристик управления обозначены одинаковыми цифрами). При подаче отрицательного сигнала в обмотку управления происходит размагничивание магнитопровода в отрицательный (управляющий) полупериод питающего напряжения; наблюдается изме-
337

Гл. 12. Статические коммутационные аппараты и регуляторы переменного тока
нение магнитного состояния магнитопроводов и напряжения на нагрузке. До точки 2 это изменение практически не ощущается. Связано это с тем, что участок между точками 1 è 2 соответствует плавноизменяющейся части динамической петли гистерезиса. (Для идеальной характеристики участок 1–2 – горизонтален). После точки 2 происходит резкое изменение Uí(Ió) до точки 3. В точке 3 под действием сигнала управления магнитопровод достигает противоположного режима насыщения. Если
âточке 1 индукцию можно считать равной + BS, òî
âточке 3 она достигает значения − BS. Для идеальной кривой дальнейшее абсолютное увеличение тока управления не может привести к изменению выходного сигнала. В реальных образцах левее точки 3 наблюдается некоторое возрастание выходного напряжения Uí. На участке левее точки 3 ÌÓÑ
работает подобно ДМУ, в режиме источника тока. Этот режим малоэффективен и используется
крайне редко. Обычно работа МУС происходит между точками 1 è 3. Точка 3 соответствует режиму холостого хода.
Характеристика управления может быть описана математически следующим соотношением [92, 93]
Uí = η [E − 2fNpS∆ B(Hó)] ,
ãäå Uí – среднее значение напряжения на нагрузке; E – среднее значение питающего напряжения (ЭДС); f – частота питающего напряжения; Nð – число витков рабочей обмотки; ∆ B (Hó) – изменение индукции от приложенной напряженности магнитного поля управления. Значение ∆ B (Hó) выбирается по соответствующим динамическим кривым размагничивания, снятым для различных материалов, на разных частотах при неизменной толщине ленты, из которой навит магнитопровод МУС. Области применения МУС такие же, что и ДМУ.
12.3.5. СМЕЩЕНИЕ ХАРАКТЕРИСТИК УПРАВЛЕНИЯ, ИЗМЕНЕНИЕ ИХ КРУТИЗНЫ, ПОЛУЧЕНИЕ РЕЛЕЙНОГО РЕЖИМА МАГНИТНОГО УСИЛИТЕЛЯ
Приведенные выше характеристики управления ДМУ и МУС (рис. 12.26,à è ðèñ 12.31,à) соответствовали случаю, когда магнитные усилители имели лишь одну обмотку управления. При одновременном включении нескольких обмоток управления результирующее воздействие может проявляться по-разному. Если использовать только обмотки управления и смещения, то в зависимости от направления МДС, созданных этими обмотками, характеристики управления будут смещаться влево или вправо, не меняя своей формы (см. рис. 12.26,á è 12.31,á).
Если же использовать управляющую обмотку и обмотку обратной связи, ток в которой пропорционален току Ií или напряжению Uí нагрузки, то характеристика управления не изменит своего первоначального положения, но претерпит изменение своей формы, причем, если крутизна ∆ Ií(∆ Ió) èëè ∆ Uí(∆ Ió) характеристики управления возрастает, то говорят, что действует положительная обратная связь, а если падает – отрицательная (рис. 12.26,â è ðèñ. 12.26,ã – äëÿ ÄÌÓ, à íà ðèñ. 12.31,â – äëÿ ÌÓÑ).
Чаще всего используются положительная обратная связь. Если при этом результирующая характеристика не имеет вертикального участка, то гово-
рят, что обратная связь слабая (коэффициент обратной связи kîñ < 1); если имеется такой участок, – критическая (kîñ = 1). При дальнейшем увеличении коэффициента обратной (kîñ > 1) наступает сильная или закритическая обратная связь. В этом случае на результирующей характеристике появляется участок, имеющий отрицательный наклон по отношению к исходному положению характеристики управления. Участок с отрицательным наклоном соответствует неустойчивому режиму работы усилителя. Магнитный усилитель переходит в релейный режим работы.
При использовании обмоток смещения и обратной связи характеристика будет менять свое положение и свою конфигурацию (рис. 12.26,ä). Отношение тока Ió îòï управления отпускания, при котором выходной параметр (Ií èëè Uí) резко падает, к току Ió ñð управления срабатывания, при котором выходной параметр резко возрастает (рис. 12.26,ä), показывает коэффициент возврата kâ бесконтактного реле на магнитных усилителях. В отличие от электромеханических аппаратов, у которых коэффициент возврата kâ < 1, у бесконтактных реле он может быть и более 1.
12.3.6. ФЕРРОРЕЗОНАНСНЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ И ТОКА
Дроссели насыщения без подмагничивания ши- |
элементов стабилизаторов напряжения и тока [50, |
роко используются в технике в качестве основных |
92, 93]. |
338

§ 12.3. Электромагнитные управляемые компоненты
Рис. 12.32. Принципиальная схема (à) и конструктивные исполнения феррорезонансных стабилизаторов (á-æ)
Íà ðèñ. 12.32 è ðèñ. 12.33,à показаны основные схемы подобных устройств, а на рис. 12.32,á–æ – их конструктивные исполнения. Стабилизатор напряжения состоит из нелинейного дросселя насыщения XL и балластного сопротивления Zá. Это сопротивление ограничивает ток источника питания при насыщении дросселя, защищает цепь источника от коротких замыканий и служит для поглощения избыточного (сверх стабилизируемого напряжения нагрузки) напряжения сети. Сопротивление нагрузки подключается параллельно дросселю насыщения XL. Поэтому, если напряжение на дросселе будет неизменным, то будет постоянным и напряжение на нагрузке.
При циклическом изменении входного напряжения e дроссель XL с числом витков NL (ðèñ. 12.33,à) будет периодически перемагничиваться и заходить в насыщение. При e = e1 дроссель XL достигает насыщенного состояния в момент времени ts1 (ñì. ðèñ. 12.33,á). До этого момента все
напряжение источника падает практически полностью на дросселе и соответственно на сопротивлении нагрузки Rí. Форма напряжения на нагрузке повторяет форму питающего напряжения (заштрихованная часть). После ts1 происходит насыщение дросселя. Его сопротивление падает практически до нуля, и все напряжение питания оказывается приложенным к балластному сопротивлению Zá. Если напряжение источника увеличится и достигнет значения e2 > e1, то время насыщения сократит-
ся и станет равным ts2 < ts1. Форма приложенного к нагрузке напряжения несколько исказится, но при этом среднее за полпериода значение напряжения на дросселе XL и сопротивлении Rí остается неизменным (см. заштрихованную часть на рисунке) и равняется Uí = 4fNSBs, ãäå f – частота питающего напряжения; N – число витков обмотки дросселя; S – площадь его поперечного сечения; Bs – индукция насыщения материала магнитопровода.
Необходимо специально отметить, что при колебаниях входного напряжения e действующее зна- чение напряжение на нагрузке не остается постоянным. Это же будет наблюдаться и при колебаниях частоты f питающего напряжения. Неизменным остается лишь среднее напряжение на нагрузке.
Потребитель Zí может включаться непосредственно в схему (см. рис. 12.32,à è ðèñ. 12.33,a) или через разделяющий трансформатор (рис. 12.32,á è ðèñ. 12.33,â), который одновременно играет роль нелинейного дросселя XL. Наличие двух электри- чески изолированных обмоток N1 è N2 дросселя обеспечивает полную электрическую развязку входной цепи и цепи нагрузки, позволяет иметь любое напряжение на выходе.
Потребители могут работать не только на переменном, но и на постоянном токе (см. рис. 12.33,ã).
Балластным сопротивлением могут быть как активные Rá, так и реактивные элементы (линейный дроссель Xë или конденсатор C с сопротивлением XC), как показано на рис. 12.32,á è ðèñ. 12.32,e.
Для повышения эффективности схемы (рис. 12.32,â, ðèñ. 12.33,ä и др.), увеличения cosϕ, расширения ее функциональных возможностей параллельно дросселю насыщения, подключается конденсатор C.
Наличие в схемах индуктивных и емкостных элементов может привести к возникновению феррорезонанса в этих схемах.
Стабилизаторы, у которых раскачка феррорезонансных колебаний происходит за счет токов перемагничивания в замкнутом параллельном контуре XL − XC, минуя источник питания (рис. 12.32,ä), называют феррорезонансным стабилизаторам напря-
339