

9.3. Общая характеристика синхронных электродвигателей
С хема
подключения СД приведена на рис. 9.4,а.
Основными
параметрами
режима являются: активная Р
и
реактивная Q
мощности,
потребляемые
СД из сети; ток статорной обмотки I;
электромагнитный момент
на валу СД Мэ,
равный
в установившемся режиме моменту
сопротивления
механизма Ммех;
частота
вращения ротора СД
или скольжение
ротора; синхронная частота вращения
ротора СД c;
угол ,
характеризующий
положение ротора СД относительно
синхронии вращающейся
оси, которую можно совместить с вектором
ЭДС электрической системы Ес.
хема
подключения СД приведена на рис. 9.4,а.
Основными
параметрами
режима являются: активная Р
и
реактивная Q
мощности,
потребляемые
СД из сети; ток статорной обмотки I;
электромагнитный момент
на валу СД Мэ,
равный
в установившемся режиме моменту
сопротивления
механизма Ммех;
частота
вращения ротора СД
или скольжение
ротора; синхронная частота вращения
ротора СД c;
угол ,
характеризующий
положение ротора СД относительно
синхронии вращающейся
оси, которую можно совместить с вектором
ЭДС электрической системы Ес.
Из-за несимметрии ротора СД (обмотка возбуждения имеется только по продольной оси) схемы замещения СД по продольной и поперечной осям ротора различаются. Параметрами схемы замещения являются: Rct, Rf, Rld, R1q - соответственно активные сопротивления статорной обмотки, обмотки возбуждения и демпферных обмоток по продольной и поперечной осям ротора; Xad, Xaq — сопротивление взаимоиндукции между статорными и роторными обмотками СД по осям d и q; X, Xf, X1d, X1q — соответственно индуктивные сопротивления рассеяния статорной обмотки, обмотки возбуждения и демпферных обмоток по осям d и q; Rfп, — активное сопротивление обмотки возбуждения в период пуска СД, когда обмотка возбуждения замкнута на дополнительное пусковое сопротивление Rп (Rfп = Rf + Rп ).
На основе параметров схемы замещения могут быть определены обобщенные параметры и параметры режима СД. Обобщенными параметрами СД являются:
синхронные индуктивные сопротивления по продольной и поперечной осям ротора
(9.33)
сверхпереходные индуктивные сопротивления по осям d и q
(9.43)
переходное индуктивное сопротивление по продольной оси (без учета демпферной обмотки)
![]() (3.95)
(3.95)
и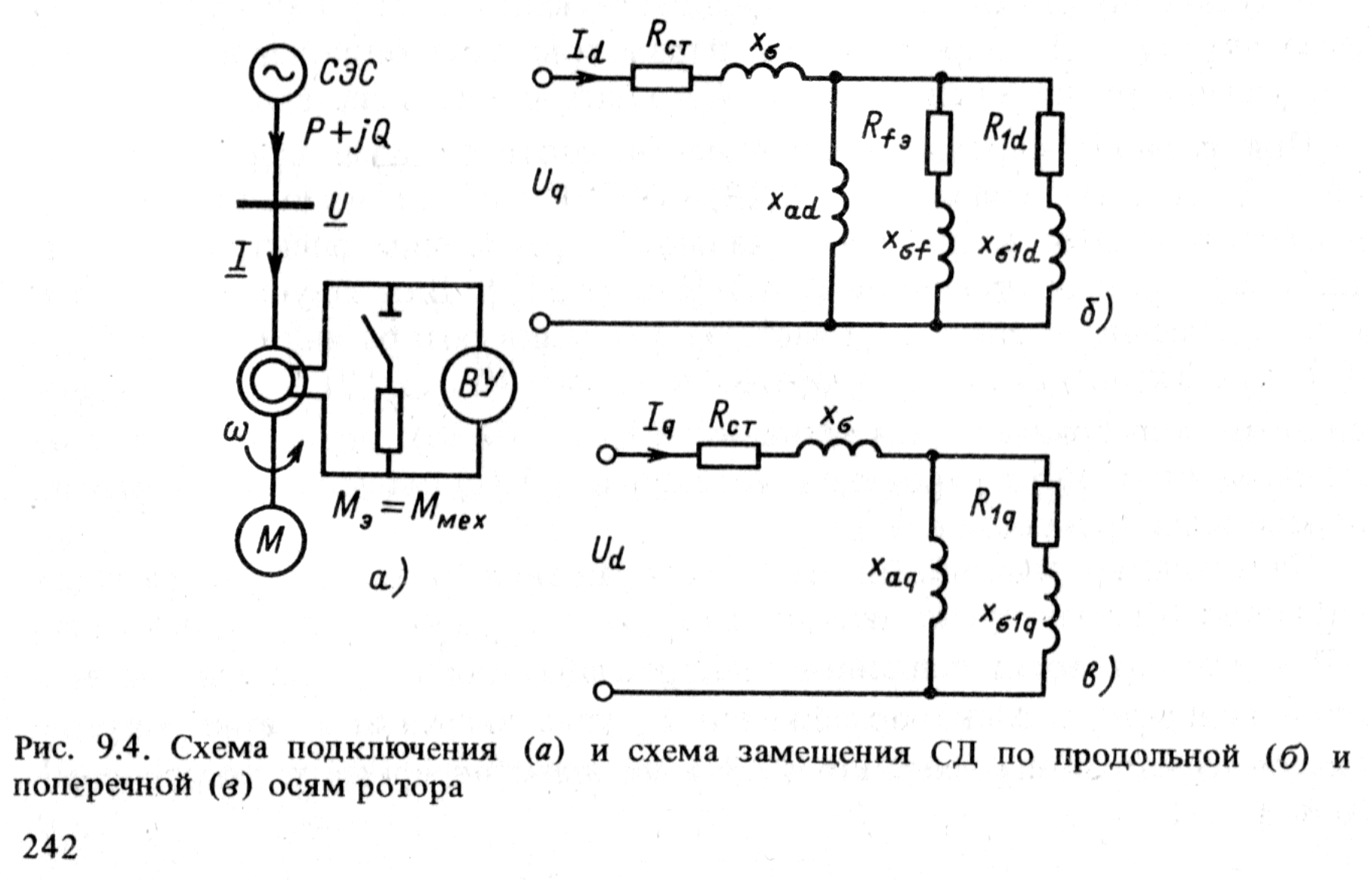 ндуктивные
сопротивления обмотки возбуждения и
демпферныхобмоток
по осям d
и
q
при
разомкнутой статорной обмотке
ндуктивные
сопротивления обмотки возбуждения и
демпферныхобмоток
по осям d
и
q
при
разомкнутой статорной обмотке
 (9.36)
(9.36)
индуктивные сопротивления этих же обмоток, но при короткозамкнутой статорной обмотке
 (9.73)
(9.73)
где X'ad и X'aq — эквивалентные сопротивления взаимоиндукции между статорными и роторными обмотками при короткозамкнутой статор-
23
ной обмотке, равны
 (9.38)
(9.38)
постоянные времени обмотки возбуждения при разомкнутой и короткозамкнутой статорных обмотках
 (9.39)
(9.39)
постоянные времени демпферных обмоток по продольной и поперечной осям при разомкнутой и короткозамкнутой статорных обмотках
 (9.40)
(9.40)
постоянные времени переходного (Т’d0) и сверхпереходного (T”d0) процессов по продольной оси ротора при разомкнутой статорной обмотке, определяемые системой уравнений
(9.41)
где 0— общий коэффициент рассеяния обмотки возбуждения и продольной демпферной обмотки при короткозамкнутой статорной обмотке:
![]() (9.42)
(9.42)
постоянные времени переходного (Т’d) и сверхпереходного (T”d) процессов по продольной оси ротора при короткозамкнутой статорной
244
обмотке, определяемые системой уравнений
 (9.43)
(9.43)
где ’ – общий коэффициент рассеяния обмотки возбуждения и продольной демпферной обмотки при короткозамкнутой статорной обмотке:
 (9.44)
(9.44)
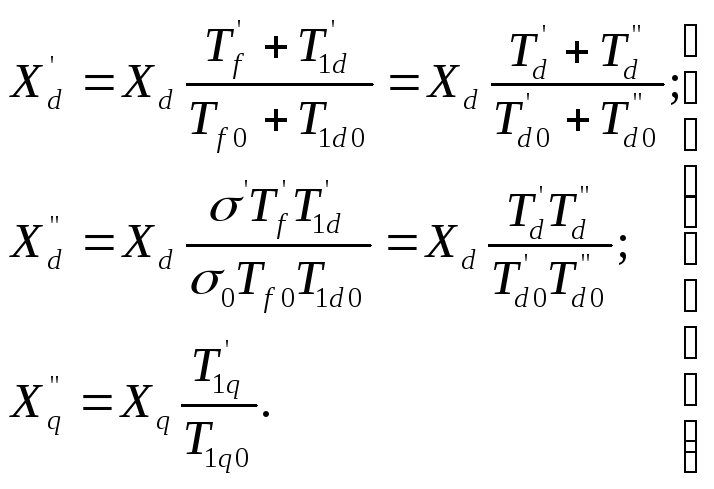
Для переходного сопротивления СД с учетом демпферной обмотки X'd и сверхпереходных сопротивлений справедливы следующие соотношения:
Параметры схемы замещения и режима СД удобно выражать в относительных единицах, когда за независимые базисные единицы приняты: Sб = Sном - полная номинальная мощность СД; Uб = Uном - номинальное междуфазное напряжение. Исключение составляет электромагнитный момент, который целесообразно выразить в долях номинального момента двигателя.
Параметры режима возбужденного СД содержат синхронные и асинхронные составляющие. Например, активную и реактивную мощности СД в соответствии с принципом наложения можно представить в виде
(6.46)
Асинхронные составляющие мощности обусловлены асинхронными свойствами обмоток на роторе СД и в соответствии со схемами замеще-
245
ния (см. рис. 9.3) равны
![]() (9.47)
(9.47)
где — эквивалентные комплексные (сопряженные) сопротивления по продольной и поперечной осям в асинхронном режиме при скольжении s.
Эквивалентное активное сопротивление обмотки возбуждения определяется режимом обмотки возбуждения: у невозбужденного СД, когда обмотка возбуждения замкнута на пусковое сопротивление,
![]() (9.48)
(9.48)
у возбужденного СД, когда обмотка возбуждения замкнута на возбудитель,
![]() (9.49)
(9.49)
Зависимости от скольжения Рa (s), Qa (s), Iа (s), Ma (s) при номинальном напряжении на выводах двигателя называются пусковыми характеристиками СД.
Синхронные составляющие режима обусловлены вынужденным током в обмотке возбуждения СД, т. е. током от возбудительного устройства. Без учета активного сопротивления статорной обмотки синхронные составляющие активной и реактивной мощностей равны соответственно
 (9.50)
(9.50)
246
Подача возбуждения СД может осуществляться по току статора или по частоте вращения ротора. Установка подачи возбуждения по току статорной обмотки составляет Iуст = (2 3) Iном, по частоте уст = 0,94 0,96. Если параметром подачи возбуждения является ток статорной обмотки, то при выполнении условия
I < Iуст (9.52)
обмотка возбуждения подключается к возбудительному устройству, т. е. на СД подается возбуждение (Rfэ = Rf, Eq > 0). Аналогично если параметром подачи возбуждения является частота вращения ротора, то при выполнении условия
уст (9.35)
на СД подается возбуждение.
После подачи возбуждения синхронная ЭДС Еq изменяется по закону
![]() (9.54)
(9.54)
Уравнения (9.46)-(9.54) определяют основные параметры режима СД.
В каталогах СД задаются: номинальные Рном, Uном, ном, cosном, а также Мп - пусковой (при s = 1) и Мв - входной (при s =0,05) асинхронные электромагнитные моменты; Мс м - максимальный синхронный момент; Iп - пусковой ток СД; Ufном, Ifном - номинальные напряжение и ток обмотки возбуждения.
247
Синхронные двигатели с шихтованными полюсами являются наиболее распространенным типом явнополюсных СД с частотой вращения ротора пном < 1000 об/мин. К ним относятся синхронные двигатели серий СД, СДН, СДВ, СДК и ряд других, используемых в качестве приводов разнообразных промышленных механизмов (насосы, компрессоры, вентиляторы, мельницы, мешалки и т. п.). Пуск СДШП, как правило, осуществляется от полного напряжения сети при обмотке возбуждения, замкнутой на дополнительное пусковое сопротивление.
Асинхронная моментная характеристика СД с шихтованным ротором в случае, когда обмотка возбуждения двигателя замкнута накоротко, может иметь провалы при частоте вращения, близкой к синхронной. Происходит "застревание" двигателя на подсинхронной частоте. Устранение провалов осуществляется включением возбуждения на дополнительное Rп.
Пусковое сопротивление обмотки возбуждения выполняет следующие функции: улучшает асинхронную моментную характеристику; позволяет увеличить скорость гашения поля; предотвращает перенапряжения в обмотке возбуждения, возникающие из-за большой скорости изменения тока возбуждения при отключении возбудителя.
К синхронным двигателям с массивным ротором относятся двигатели серий СТМ, СТД с номинальной частотой вращения 3000 с-1. СДМП получили широкое распространение, в частности, в качестве приводов магистральных насосов и газовых компрессоров. В отличие от двигателей с шихтованным ротором, имеющих сосредоточенную демпферную обмотку, у СДМР ротор представляет собой единую стальную поковку с выфрезерованными пазами для обмотки возбуждения и система демпферных контуров распределена по всей бочке ротора. Наличие мошной демпферной системы, распределенной в массивном роторе, значительно улучшает пусковые характеристики турбодвигателей, однако приводит к существенному усложнению расчетов параметров и пусковых характеристик двигателей. Пуск СДМР осуществляется в основном от полного (иногда сниженного) напряжения при короткозамкнутой обмотке возбуждения.