

мпсу / Лекции pdf / Лекции модуль 4 МПСУ
.pdfскачка входной величины и моментом выдачи кода, соответствующего данной выборке;
• время выборки tв (стробирования), т.е. временной интервал, в течение которого происходит образование одного выборочного значения и входной сигнал непосредственно взаимодействует с АЦП. В первом приближении можно считать,
что вне интервала tв входная величина не оказывает влияния на результат преобразования, tв < tпр . При работе без схемы выборки – хранения tв < tпр .
Период дискретизации не может быть меньше времени выполнения одного
преобразования, т.е. Тд < tпр . В общем случае выбор частоты при равномерной дискретизации Fд=1/Тд будет зависеть также от допустимого уровня погрешностей, возникающих при восстановлении исходного сигнала в любой момент времени по его выборкам.
Время преобразования определяется как быстродействием отдельных входящих в АЦП цифровых устройств, так и временем установления, необходимым для завершения переходных процессов установления сигнала с требуемой точностью в аналоговых устройствах (усилителях, делителях, схемах выборки – хранения и др.).
В табл. 6.1 даны параметры отечественных интегральных АЦП и указана возможность их непосредственного сопряжения с микропроцессором.
Таблица 6.1
Параметры отечественных интегральных АЦП
Тип |
Метод преобразования |
Разря |
tпр, |
Напр. пит., В |
Мощ |
Примечания |
|
|
и элементная база |
дност |
мкс |
(ток пит., мА) |
ность |
|
|
|
|
ь n, |
|
|
Р, |
|
|
|
|
бит |
|
|
мВт |
|
|
К572ПВ1 А,В |
Поразрядного |
12 |
100 |
5(3); -15(5) |
90 |
Сопрягается с МП |
|
|
уравновешивания, |
|
|
|
|
|
|
|
КМОП |
|
|
|
|
|
|
К572ПВ2 |
|
12 |
2 104 |
5(1,8); -5 |
20 |
- |
|
|
Двойного |
|
|
|
|
|
|
|
интегрирования, |
|
|
|
|
|
|
КШЗПВ1 |
КМОП |
10 |
30 |
5(10); -15(20) |
225 |
Сопрягается |
с |
|
|
|
|
|
|
МП, встроенное |
|
|
Поразрядного |
|
|
|
|
Uоп |
|
К1107ПВ1 |
уравновешивания |
6 |
0,1 |
5(30); -6(150) |
900 |
- |
|
|
Параллельный, |
|
|
|
|
|
|
К1107ПВ2 |
биполярная (ТТЛ) |
8 |
0,1 |
5(35); -6(450) |
2500 |
- |
|
К1107ПВЗ |
То же |
6 |
0,02 |
5(60); -5,2(80) |
- |
- |
|
|
Параллельный, |
|
|
|
|
|
|
К1107ПВ4 |
биполярная (ЭСЛ) |
8 |
0,02 |
5(300); -5,2(300) |
- |
С наращиваемой |
|
|
|
|
|
|
|
разрядностью |
|
К.1108ПВ1 |
То же |
10 |
0,9 |
5(50); -5,2(130) |
800 |
- |
|
|
Поразрядного |
|
|
|
|
|
|
|
уравновешивания, |
|
|
|
|
|
|
К1108ПП1А |
биполярная |
12-14 |
0-500 |
+15(5); -15(5) |
160 |
- |
|
|
|
|
кГц |
|
|
|
|
МП43ПП1 |
|
10 |
0-100 |
16(6,5); -15(6,5) |
- |
- |
|
|
ПНЧ, биополярная |
|
кГц |
|
|
|
|
М0100ПП1 |
|
- |
0-100 |
±15; -5; -12 |
900 |
Крутизна |
|
|
То же |
|
кГц |
|
|
преобразования |
8 |
|
|
|
|
|
|
±0,16 кГц/В |
|
К572ПВ4 |
ПНЧ, |
гибридная, |
8 |
17 |
5(3) |
- |
Сопрягается |
с |
|
пленочная |
|
|
|
|
|
МП; имеет |
ОЗУ |
|
|
|
|
|
|
|
8×8 бит |
|
|
8-канальная, |
|
|
|
|
|
|
|
К572ПВ5 |
поразрядного |
11 |
8 |
- |
5500 |
- |
|
|
КП07ПВ5 |
уравновешивания, |
|
|
|
|
|
|
|
|
КМОП |
|
|
|
|
|
|
|
К1108ПВ2 |
Поразрядного |
8 |
3 |
- |
5500 |
- |
|
|
|
уравновешивания, |
|
|
|
|
|
|
|
КРШ8ПП2 |
модульный, |
|
17 |
6 105 |
±15; +5 |
- |
Две микросхемы, |
|
К572ПП2 |
биполярная |
|
|
|
|
|
встроенное Uоп |
|
|
То же |
|
|
|
|
|
|
|
|
Двойного |
|
|
|
|
|
|
|
|
интегрирования |
|
|
|
|
|
|
|
Лекция №25. УСТРОЙСТВА СОПРЯЖЕНИЯ С ОБЪЕКТОМ МПСУ
Цифроаналоговые преобразователи
Цифроаналоговым преобразователем (ЦАП) называется устройство, преобразующее входное сообщение из цифровой формы представления в аналоговую.
ЦАП находят широкое применение не только как составная часть АЦП уравновешивающего преобразования, но и в качестве устройств сопряжения контроллеров управляющими и регистрирующими устройствами, в программируемых источниках питания и генераторах функций и др. ЦАП, в которых источник опорного напряжения может изменяться, обычно называют "умножающими", а ЦАП c внутренним неизменным источником – "полным".
Многие технические характеристики ЦАП в основном те же, что и у АЦП. Следует отметить, что у ЦАП проявляется одна из наиболее трудно устранимых погрешностей – дифференциальная нелинейность, связанная с разбросом параметров резисторов в делителе и аналоговых ключах.
Динамические погрешности ЦАП, как и АЦП, обусловлены инерционностью отдельных элементов и узлов, входящих в ЦАП. Однако ЦАП имеют и так называемую коммутационную помеху в виде выходных всплесков при смене входного кода. Такие всплески представляют собой острые пики выходного сигнала, возникающие за счет несинхронности открывания и закрывания аналоговых ключей в разных разрядах делителя ЦАП. Наиболее значительно они проявляются при
продолженных переходах, когда кодовая комбинация типа 011...1 сменяется на 100...0. При этом за счет более медленного выключения ключей на выходе ЦАП будет существовать некоторое время сигнал, соответствующий коду 111... 1, который воспринимается как коммутационная помеха. Эта помеха характерна для быстродействующих ЦАП, где сведены к минимуму емкости, которые могли бы ее сгладить. Радикальным способом подавления выбросов является использование вместе с ЦАП устройств выборки – хранения или стробируемых компараторов.
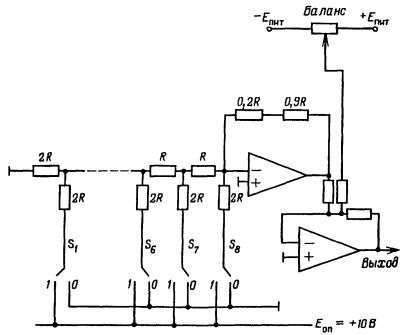
Широко распространенная схема ЦАП на базе матрицы сопротивлений типа
R-2R показана на рис. 6.17. С помощью переключателей S1-S8 на схеме условно показаны значения отдельных двоичных разрядов входного кода ЦАП. Если. все разряды имеют низкий уровень (0), то выходное напряжение равно нулю. На практике, однако, в этом случае на выходе может быть некоторое напряжение, вызванное напряжением смещения операционного усилителя. Для устранения этого напряжения служит схема автоматической балансировки, условно показанная на
рис. 6.17 с помощью потенциометра "баланс". Если старший значащий разряд S8
равен 1, выходное напряжение примерно равно 1/2Eоп так как коэффициент усиления по напряжению операционного усилителя, охваченного отрицательной обратной связью, равен отношению сопротивления обратной связи к сопротивлению на входе. Аналогично, если установлен (т.е. равен 1) только 7-й разряд, то выходное
напряжение равно 1/4Eоп ,а вклад младшего разряда байта в выходное напряжение
равен 2-8Eоп . Полное выходное напряжение равно сумме вкладов отдельных разрядов:
i=8
Uвых = ∑Si 2i−9 , i=1
где Si, - значения разрядов входного байта преобразователя. Для работы рассмотренного ЦАП необходим источник прецизионного напряжения Eоп.
Рис. 6.17. Схема цифро-аналогового преобразователя (ЦАП)
В табл. 6.2 приведены основные параметры отечественных интегральных
ЦАП.
Как видно из табл. 6.1 и 6.2, актуальным является выпуск интегральных схем АЦП и ЦАП с 14–16 разрядами. Ранее АЦП с разрешающей способностью 14 разрядов и выше обычно выполнялись в виде схемной платы или модуля. Сегодня достигнута разрешающая способность 16 разрядов, а гибридные приборы характеризуются 22-разрядным разрешением. Для этого используются методы автоматической калибровки, а в гибридных схемах – сочетание монолитных кристаллов с высококачественными прецизионными бескорпусными компонентами ИС. Современные схемы АЦП содержат также схему выборки–хранения.
Другой задачей является дальнейшее повышение быстродействия для АЦП с разрядностью 12 и более. Она решается с помощью использования параллельно- последовательных структур построения АЦП, содержащих обычно два параллельных быстродействующих АЦП на 6-8 разрядов каждый, соединенных последовательно, а также схему выборки – хранения, 6–8-разрядный ЦАП и умножающий усилитель.
Таблица 6.2
Параметры отечественных интегральных ЦАП
Тип |
Элементная база |
Разряд |
tпр, мкс |
Напр. пит., В |
Мощ |
Примечания |
|
|
|
ность |
|
(ток пит., мА) |
ность |
|
|
|
|
n, бит |
|
|
Р, |
|
|
|
|
|
|
|
мВт |
|
|
К572ПА1 |
КМОП |
10 |
5 |
15(2) |
30 |
Умножающий |
|
|
тонкопленочный |
|
|
|
|
|
|
К572ПА2 |
КМОП |
12 |
15 |
5(2); 15(2) |
40 |
Умножающий с |
|
|
|
|
|
|
|
памятью |
|
К594ПА1 |
Биполярная, |
12 |
3,5 |
5(25); -15(35) |
700 |
- |
|
|
(ТТЛ и КМОП) |
|
|
|
|
|
|
К1108ПА1А, |
Биполярная |
12 |
0,4 |
5(15); |
500 |
- |
|
Б |
(ТТЛ) |
|
0,7 |
-15(48) |
|
|
|
К1108ПА2 |
Биполярная |
12 |
0,1 |
- |
800 |
- |
|
|
(ТТЛ) |
|
|
|
|
|
|
К1118ПА1 |
Биполярная |
8 |
0,02 |
-5,2(130) |
- |
- |
|
|
(ЭСЛ) |
|
|
|
|
|
|
КП18ПА2 |
Биполярная |
10 |
0,05 |
+5(15); |
- |
В режиме ЭСЛ |
|
|
(ЭСЛ и ТТЛ) |
|
|
-5(120) |
|
Uип =-5В |
|
К1118ПАЗ |
Биполярная |
8 |
0,01 |
5(20); -5,2(80) |
- |
- |
|
К572ПАЗ |
КМОП |
10 |
- |
6;-12 |
- |
- |
|
КМП817ПА1 |
Гибридная, |
15 |
10 |
- |
- |
- |
|
|
биполярная |
|
|
|
|
|
|
252ПАЗ |
То же |
10 |
0,5 |
- |
150 |
- |
|
К427ПА1 |
Гибридная |
15 |
20 |
5; 15 |
- |
Две |
схемы |
|
|
|
|
|
|
|
К572ПАЗ и ОУ- |
|
|
|
|
|
|
|
К140УД16 |
К281КТ1 |
Гибридная, |
|
8 |
5 |
- |
15 |
- |
|
биполярная |
с |
|
|
|
|
|
|
МОП |
|
|
|
|
|
|
Ф7088 |
|
|
15 |
10 |
- |
5000 |
- |
|
Модульная, |
|
|
|
|
|
|
К417ПА1 |
биполярная |
|
13 |
15 |
10 |
700 |
- |
|
- |
|
|
|
|
|
|
Созданы новые интегрирующие АЦП с высокой разрешающей способностью и временем цикла, сниженным с нескольких сотен до десятков микросекунд, к тому же и с более низкой стоимостью. Эти АЦП представляют собой сложные модификации преобразователя напряжения в частоту (ПНЧ) и называются дельта- сигма-преобразователями.
6.9. Вывод выходных сигналов на исполнительные устройства
Расчетные значения управляющих воздействий или их приращений представляются в МПС в виде двоичных чисел. Для управления исполнительными устройствами непрерывного типа (пневматическими, гидравлическими или электрическими приводами) необходимо преобразование цифровых данных в соответствующие аналоговые сигналы. Это преобразование выполняется с помощью цифроаналоговых преобразователей (ЦАП) и фиксирующих элементов с памятью, сохраняющих преобразованные значения управляющих воздействий в промежутках между моментами обращения управляющей программы к ЦАП.
Обычно один ЦАП используют для управления несколькими исполнительными устройствами (рис. 6.19) с помощью коммутатора (демультиплексора), передающего сигнал с выхода ЦАП на один из фиксирующих элементов, запоминающих преобразованный выходной сигнал в промежутке между обращениями к данному исполнительному устройству. Для управления непрерывными исполнительными устройствами, входящими в систему ГСП, на их вход должны выдаваться сигналы определенного уровня (0-10 В, 0-20 мА или 4-20 мА постоянного тока) с выхода устройства вывода информации из контроллера.
В дальнейшем этот сигнал усиливается в устройстве и преобразуется в положение регулирующего органа. Иногда между контроллером и исполнительным устройством включается промежуточный (например, электропневматический) преобразователь управляющего сигнала. В современных исполнительных устройствах цифроаналоговые преобразователи в интегральном исполнении вместе со схемой приема двоичного кода из МПС входят в состав самого устройства. В этом случае управляющее воздействие выводится из МПС непосредственно, без цифроаналогового преобразования, обычно в последовательном коде.

Рис. 6.19. Вывод сигналов на исполнительные устройства:
ЦАП - цифроаналоговый преобразователь; Ф − схема выборки − хранения (фиксатор)
Для управления абсолютным положением регулирующего органа (0-100%) МПС может выдавать сигналы одного знака, но ЦАП в этом случае должен иметь достаточно большую разрядность (8-12 бит), для того чтобы обеспечить достаточную точность преобразования. При выдаче приращения управляющего воздействия требования к разрядности ЦАП ниже (6-8 бит), но выходной сигнал машины должен быть разного знака.
По принципу действия исполнительные устройства можно разбить на следующие 4 группы:
1)исполнительные устройства с пропорциональными характеристиками (мембранные исполнительные механизмы, гидроприводы с механической обратной связью);
2)интегрирующие исполнительные устройства (гидроприводы без обратной связи, приводы на основе электродвигателей постоянного тока с регулируемой скоростью);
3)интегрирующие исполнительные устройства с постоянной скоростью (реверсивные электродвигатели переменного тока);
4)исполнительные устройства дискретного типа (шаговые двигатели).
В исполнительных устройствах 1-й группы перемещение регулирующего органа прямо пропорционально управляющему воздействию. В исполнительных устройствах 2-й группы управляющая переменная воздействует на скорость перемещения регулирующего органа, поэтому его положение определяется как интеграл от управляющего воздействия. В исполнительных устройствах 3-й группы регулирующий орган перемещается с одной и той же скоростью как в прямом, так и в обратном направлении. Управляющая переменная на входе таких исполнительных устройств должна быть преобразована в длительность разнополярных импульсов включения привода. Импульсы одной полярности включают привод на перемещение регулирующего органа в прямом направлении, а импульсы другой полярности - на перемещение в обратном направлении. Для преобразования двоичного кода управляющего воздействия в такую последовательность импульсов используют специализированные ЦАП. Текущее положение регулирующего органа
в исполнительных устройствах 3-й группы определяется как интеграл от последовательности управляющих импульсов с учетом их полярности.
Дискретные исполнительные устройства типа шаговых двигателей (4-й группы) особенно удобны для сопряжения с МПС, поскольку ЦАП в этом случае не требуется. Положение регулирующего органа в подобных устройствах пропорционально числу поступающих от МПС управляющих импульсов, которое и является управляющим воздействием.

Лекция № 26. КРАТКИЙ ОБЗОР РЫНКА МИКРОПРОЦЕССОРНЫХ СИСТЕМ ДЛЯ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
Типовые решения задач автоматизации технологических процессов и встраиваемых систем
Некоторые технические решения с использованием IBM PC совместимых контроллеров на базе сетей Ethernet, PROFIBUS, CAN и других технологий представлены на рис. 9.1-9.2. PC-based контроллеры программируются с помощью SCADA-систем, например, Trace Mode или UltraLogik. Данные пакеты имеют открытый интерфейс, позволяющий программировать контроллеры практически любой конфигурации и создавать алгоритмы распределенных управляющих систем реального времени. Пакеты предназначены для работы в любых промышленных сетях Fieldbus и поддерживают стандарт ОРС - сервер для связи со SCADA системами. Для создания Soft-PLC контроллеров на базе VME PC совместимых компьютеров с контроллерами Fieldbus и системами ввода-вывода может быть использован технологический язык программирования IО Works, также имеющий ОРС-интерфейс для систем верхнего уровня.
Рис. 9.1. IBM PC совместимые контроллеры для управления технологическими процессами

Рис. 9.2. Программируемые на стандартных технологических языках логические контроллеры
Распределенные управляющие системы могут быть созданы с помощью «внутренних» УСО на основе магистральных интерфейсов ISA, PC/104, PCI, Compact PCI, VME управляющих процессоров (рис. 9.3) или «выносных» интеллектуальных УСО на базе «полевых» шин Ethernet, Fieldbus, RS-485, HART, AS-интерфейсов (рис. 9.4).
Рис. 9.3. Устройства ввода-вывода систем автоматизации - локальные УСО, работающие на магистрали управляющей системы

Рис. 9.4. Распределенная система управления на базе УСО, объединенных «полевыми» шинами
Для определения текущего состояния объекта управления используются аналоговые первичные преобразователи (датчики) с унифицированным выходным сигналом, с нестандартным выходным сигналом и интеллектуальные, т.е. с встроенным микропроцессором (рис. 9.5). Такие сигналы можно объединить в группу, называемой «аналоговым входом». Также имеет место «аналоговый выход» для воздействия регулятора на объект. Определение состояния объекта с параметрами характеризующимися положениями «Включено – выключено», «Открыто – закрыто» производится дискретными датчиками, сигналы с которых принято называть «дискретным входом». Аналогично дискретные сигналы для включения (открытия) или выключения (закрытия) исполнительных устройств объединяются в группу «дискретных выходов» (рис. 9.5). Помехоустойчивость и нормализацию сигналов обеспечивают модули гальванического разделения и нормирующие преобразователи (рис. 9.6).