

TAU_lab_rab_3_kurs_1_semestr-2008
.pdfМІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ |
«Аналіз та синтез лінійних систем автоматичного керування» ме- |
|
тодичні вказівки до виконання лабораторних робіт з курсу «Теорія авто- |
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ |
матичного керування» для студентів денної форми навчання за спеціаль- |
«ХАРКІВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ» |
ностями 7.092203 – Електромеханічні системи автоматизації та електропри- |
|
вод, 7.092205 – Електропобутова техніка |
Кафедра «Автоматизовані електромеханічні системи» |
к.т.н., доц. В.М. Шамардіна |
Укладачі: |
|
|
ст. викл. Л.В. Асмолова |
АНАЛІЗТАСИНТЕЗЛІНІЙНИХ СИСТЕМ АВТОМАТИЧНОГО КЕРУВАННЯ
МЕТОДИЧНІ ВКАЗІВКИ ДО ВИКОНАННЯ ЛАБОРАТОРНИХ РОБІТ
З КУРСУ «ТЕОРІЯ АВТОМАТИЧНОГО КЕРУВАННЯ»
для студентів денної форми навчання за спеціальностями 7.092203 – Електромеханічнісистемиавтоматизаціїтаелектропривод, 7.092205 – Електропобутоватехніка
ЗАТВЕРДЖЕННО редакційно – видавнича рада університету, протокол від
Кафедра «Автоматизовані електромеханічні системи»
Відповідальний за випуск Рецензент
Харків – 2008
23 июля 2008 |
2 |

Лабораторна робота № 1
Дослідження типових лінійних ланок
Ціль роботи: придбання навичок аналізу динамічних властивостей типових лінійних ланок по реакції на стандартні вхідні впливи з використанням математичного моделювання на персональному комп'ютері (ПК) у середовищі пакета MATLAB роз-
ширення Simulink.
1.1. Теоретичні положення
Типовими динамічними ланками називаються ланки, які описуються диференційними рівняннями не вище другого порядку.
Типові динамічні ланки діляться на:
-елементарні
-складні.
Передатні функції елементарних ланок являють собою одночлен нульового або першого ступеня s, де s – оператор диференціювання (оператор Лапласа), або дріб, знаменник якої є простій множник першого або другого ступеня s, що не розкладається.
Складні ланки можуть бути представлені як послідовне або паралельне з'єднання двох або трьох елементарних ланок.
Кожна лінійна ланка характеризується:
– рівнянням динаміки – диференційним рівнянням першого
|
|
|
|
|
|
dy |
|
|
|
dx |
|
|
|
|
|
|
||||
|
|
|
|
T |
|
|
+ y = k T |
|
|
|
|
|
+ x |
|
|
|
(1.1) |
|||
|
|
|
|
dt |
|
dt |
|
|
|
|||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
||||||
або другого |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
2 |
y |
|
dy |
|
|
|
d |
2 |
x |
|
|
dx |
|
|
||||
T2 |
|
+2ξT |
|
+ y = k T2 |
|
+2ξ |
T |
+ x |
(1.2) |
|||||||||||
|
|
2 |
|
|
|
|
2 |
|
|
|||||||||||
|
dt |
|
|
dt |
|
0 |
|
dt |
|
|
0 0 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
||||||
порядків;
– передатною функцією, обумовленої як відношення зображення Лапласа вихідної величини y(s) до зображення Лапласа вхідної величини x(s) при нульових початкових умовах: W(s) =y(s)/x(s);
23 июля 2008 |
3 |
–перехідною функцією h(t), що є реакцією ланки на вхідний сигнал
увигляді одиничної ступневої функції x(t)=1(t);
–імпульсною або ваговою функцією k(t), що є реакцією ланки на одиничний імпульс, площина якого дорівнює 1 при нескінченно малій тривалості, і висоті, рівній нескінченності x(t)=δ(t);
–частотними характеристиками, що представляють собою ком-
плексне число, модуль якого дорівнює відношенню амплітуди вихідної
величини Авих до амплітуди вхідної Авх, а аргумент – зрушенню фаз ϕ вихідної величини стосовно вхідної
A(ω)= W(jω) = Aвих((ω)) = A(ω) e jϕ(ω) = U(ω)+ jV(ω)
Aвх ω
ϕ = arg W(jω).
Розрізняють наступні типи динамічних ланок:
•Пропорційна (П) –
•Аперіодична ланка першого порядку (А-1) –
(1.3)
W(s)= K
W(s)= TsK+1
• |
Інтегруюча (І) – |
|
W(s)= |
K |
|
||||
|
|
|
s |
||||||
|
|
|
|
|
|
||||
• |
Ідеальна диференційна (Д) – |
|
W(s)= Ts |
||||||
• |
Реальна диференційна (РД) – |
|
W(s)= |
|
|
Ts |
|
||
|
|
|
|
T s +1 |
|||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
0 |
|
||
• |
Ідеальна пропорційно - диференційна (ПД) – |
|
|
|
|
||||
|
|
|
W(s)= T0s +1 |
||||||
• |
Реальна пропорційно - диференційна (РПД) – |
|
|
|
|
||||
|
|
|
W(s)= |
|
Ts +1 |
|
|||
|
|
|
|
T s +1 |
|||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
0 |
|
||
• |
Пропорційно-інтегруюча (ПІ) – |
|
W(s)= |
Ts +1 |
|||||
|
|
|
|
|
|
|
T s |
||
|
|
|
|
|
|
0 |
|
||
• |
Коливальна (К) – |
W(s)= |
K |
|
, де ξ<1 |
||||
|
|
T2s2 +2ξTs +1 |
|||||||
23 июля 2008 |
4 |
|
|
|
|
|
|
|
|

• |
Консервативна (Кон) – |
W(s)= |
K |
|
|
|
T2s2 +1 |
||
|
|
|
||
• |
Аперіодична ланка другого порядку (А-2) – |
|||
W(s)= |
K |
|
= |
K |
|
|
|
|
, де ξ1>1 |
||
T2s2 +2ξ |
Ts +1 |
(T1s +1)(T2s +1) |
|||
|
1 |
|
|
|
|
Тип динамічної ланки визначається алгоритмом перетворення вхідного сигналу.
Розрізняють наступні стандартні сигнали:
Одиничний ступеневий вплив x(t)= 1(t). Він миттєво зростає від нуля до одиниці й далі залишається незмінним.
Одинична імпульсна функція – x(t)=δ(t), являє собою сигнал із властивістю δ(t)=0 при t<0 і t>0, тобто вона існує тільки в момент часу t=0.
Лінійно зростаючий сигнал - x(t) =1 t
Гармонійний сигнал одиничної амплітуди із частотою ω – x(t) =1 sin(ωt +ϕ0 ).
1.2.Завдання на виконання роботи
1.Вивчити лекційний матеріал по темі «Типові динамічні ланки».
2.Відповісти на питання для самоконтролю, наведені в даних методичних вказівках.
3.Ознайомитися з коротким описом програмного пакета MATLAB+Simulink для структурного моделювання автоматичних систем керування (АСК) (див. Додаток 1).
4.Одержати у викладача індивідуальний варіант значень параметрів
типових ланок (див. Табл. 1.1).
5.Підготувати в пакеті MATLAB розширенні Simulink структурні алгоритмічні схеми моделей (див. Додаток 2), у яких відображено:
•почергове використання стандартних вхідних сигналів x(t);
•можливість побудови в одних координатних осях графіків зміни вхідного x(t) і вихідного y(t) впливів досліджуваної ланки;
•необхідність варіації параметрів (К, Т, Т0, ξ, ξ1) у досліджуваній ланці.
6.Виконати розрахунок досліджуваної моделі, зберігаючи графічні результати розрахунків у вигляді файлів.
7.Оформити звіт лабораторної роботи.
8.Одержати оцінку результатів своєї роботи у викладача, відповівши на його контрольні питання.
1.3.Питання для самоконтролю
1.Дайте визначення передатної функції.
2.Назвіть і запишіть рівняння типових вхідних впливів.
3.Поняття перехідної та вагової функції АСК.
4.Записати передатну функцію та намалювати часові характеристики (перехідну і вагову) типової ланки:
диференційних ланок;
аперіодичної ланки першого порядку;
інтегруючої ланки;
коливальної ланки;
консервативної ланки;
аперіодичної ланки другого порядку.
5.Оцінити вплив варіації параметрів динамічних ланок на їхні часові характеристики.
23 июля 2008 |
5 |
23 июля 2008 |
6 |

Таблиця 1.1. – Варіанти значень параметрів типових ланок
№ |
К |
Т |
T0 |
ζ |
ζ1 |
п/п |
|||||
1 |
2 |
3 |
4 |
5 |
6 |
1 |
10 |
0,1 |
0,01 |
0,6 |
1,1 |
2 |
15 |
0,2 |
0,01 |
0,7 |
1,0 |
3 |
20 |
0,2 |
0,01 |
0,8 |
1,2 |
4 |
25 |
0,05 |
0,005 |
0,5 |
1,3 |
5 |
20 |
0,3 |
0,04 |
0,7 |
1,2 |
6 |
25 |
0,5 |
0,05 |
0,6 |
1,25 |
7 |
35 |
0,15 |
0,001 |
0,45 |
1,0 |
8 |
30 |
0,2 |
0,005 |
0,75 |
1,2 |
9 |
40 |
0,02 |
0,001 |
0,8 |
1,2 |
10 |
45 |
0,5 |
0,05 |
0,55 |
1,35 |
11 |
50 |
0,25 |
0,01 |
0,6 |
1,2 |
12 |
55 |
0,55 |
0,05 |
0,6 |
1,25 |
13 |
65 |
0,15 |
0,001 |
0,4 |
1,0 |
14 |
70 |
0,25 |
0,005 |
0,7 |
1,2 |
15 |
80 |
0,25 |
0,01 |
0,25 |
1,15 |
16 |
75 |
0,2 |
0,01 |
0,7 |
1,05 |
17 |
30 |
0,2 |
0,01 |
0,4 |
1,25 |
18 |
95 |
0,05 |
0,005 |
0,55 |
1,3 |
19 |
110 |
0,3 |
0,04 |
0,35 |
1,2 |
20 |
75 |
0,5 |
0,05 |
0,45 |
1,45 |
21 |
250 |
0,1 |
0,01 |
0,5 |
1,1 |
22 |
150 |
0,2 |
0,01 |
0,35 |
1,0 |
23 |
55 |
0,2 |
0,01 |
0,6 |
1,2 |
24 |
35 |
0,05 |
0,005 |
0,5 |
1,3 |
25 |
80 |
0,3 |
0,04 |
0,4 |
1,2 |
26 |
45 |
0,35 |
0,01 |
0,75 |
1,15 |
27 |
100 |
0,5 |
0,01 |
0,55 |
1,25 |
28 |
65 |
0,05 |
0,005 |
0,55 |
1,3 |
29 |
10 |
0,35 |
0,04 |
0,35 |
1,2 |
30 |
35 |
0,5 |
0,05 |
0,45 |
1,45 |
31 |
50 |
0,4 |
0,01 |
0,5 |
1,1 |
32 |
15 |
0,3 |
0,01 |
0,35 |
1,0 |
33 |
65 |
0,25 |
0,01 |
0,65 |
1,25 |
34 |
75 |
0,5 |
0,005 |
0,5 |
1,3 |
35 |
50 |
0,35 |
0,04 |
0,4 |
1,2 |
36 |
110 |
0,15 |
0,01 |
0,6 |
1,1 |
37 |
115 |
0,1 |
0,01 |
0,7 |
1,0 |
№ |
К |
Т |
T0 |
ζ |
ζ1 |
п/п |
|||||
1 |
2 |
3 |
4 |
5 |
6 |
38 |
120 |
0,5 |
0,01 |
0,8 |
1,2 |
39 |
25 |
0,05 |
0,005 |
0,5 |
1,3 |
40 |
120 |
0,3 |
0,04 |
0,7 |
1,2 |
41 |
125 |
0,5 |
0,05 |
0,6 |
1,25 |
42 |
135 |
0,15 |
0,001 |
0,45 |
1,0 |
43 |
130 |
0,2 |
0,005 |
0,75 |
1,2 |
44 |
140 |
0,02 |
0,001 |
0,8 |
1,2 |
45 |
145 |
0,5 |
0,05 |
0,55 |
1,35 |
46 |
250 |
0,25 |
0,01 |
0,6 |
1,2 |
47 |
255 |
0,55 |
0,05 |
0,6 |
1,25 |
48 |
165 |
0,15 |
0,001 |
0,4 |
1,0 |
49 |
170 |
0,25 |
0,005 |
0,7 |
1,2 |
50 |
180 |
0,25 |
0,01 |
0,25 |
1,15 |
51 |
50 |
0,4 |
0,01 |
0,7 |
1,1 |
52 |
35 |
0,25 |
0,01 |
0,5 |
1,0 |
53 |
20 |
0,6 |
0,01 |
0,6 |
1,2 |
54 |
145 |
0,45 |
0,01 |
0,55 |
1,3 |
55 |
70 |
0,3 |
0,01 |
0,4 |
1,2 |
56 |
85 |
0,35 |
0,01 |
0,5 |
1,25 |
57 |
90 |
0,45 |
0,01 |
0,55 |
1,0 |
58 |
100 |
0,2 |
0,05 |
0,65 |
1,2 |
59 |
60 |
0,25 |
0,01 |
0,3 |
1,2 |
60 |
75 |
0,3 |
0,01 |
0,45 |
1,35 |
61 |
80 |
0,65 |
0,01 |
0,3 |
1,2 |
62 |
65 |
0,15 |
0,05 |
0,2 |
1,25 |
63 |
115 |
0,35 |
0,01 |
0,4 |
1,0 |
64 |
120 |
0,25 |
0,05 |
0,7 |
1,2 |
65 |
180 |
0,25 |
0,01 |
0,25 |
1,15 |
66 |
175 |
0,4 |
0,01 |
0,3 |
1,55 |
67 |
130 |
0,6 |
0,01 |
0,45 |
1,25 |
68 |
195 |
0,1 |
0,05 |
0,5 |
1,3 |
69 |
110 |
0,25 |
0,04 |
0,35 |
1,4 |
70 |
175 |
0,7 |
0,05 |
0,45 |
1,45 |
71 |
7,0 |
0,45 |
0,01 |
0,3 |
1,55 |
72 |
13 |
0,65 |
0,01 |
0,45 |
1,25 |
73 |
19 |
0,15 |
0,05 |
0,5 |
1,3 |
74 |
11 |
0,25 |
0,04 |
0,35 |
1,4 |
Лабораторна робота № 2
Дослідження динамічних режимів двигуна постійного струму с незалежним збудженням
Ціль роботи: придбання навичок побудови структурних алгоритмічних схем по диференціальним рівнянням, які описують роботу АСК на прикладі двигуна постійного струму з незалежним збудженням (ДПС НЗ); аналізу динамічних властивостей ДПС НЗ у різних режимах роботи з використанням математичного моделювання на персональному ком- п'ютері (ПК) у середовищі пакету MATLAB розширення
Simulink.
2.1.Теоретичні положення
Велектроприводах постійного струму часто використовуються електродвигуни постійного струму з незалежним збудженням. Основна схема включення представлена на рис. 2.1, де прийняті наступні позначення: М – ДПС НЗ; IЯ, IВ – струми в ланках обмоток якоря та збудження, А; UЯ, UВ –
напруга обмоток якоря та збудження, В; LЯ, LВ – індуктивності обмоток якоря та збудження, Гн; RЯ = RОЯ + RДП + RКО + RЩ – опір якоря, що складається з опорів обмотки якоря RОЯ, додаткових полюсів RДП, компенсаційної обмотки RКО та щіткового контакту RЩ, Ом; RВ – опір обмотки збудження, Ом; ω – кутова швидкість електродвигуна, рад/с; М, МС (IС) – електромагнітний момент двигуна та
Рис. 2.1. Схема включення ДПС НЗ момент (струм) опору, Н м.
При створенні математичної моделі ДПС НЗ приймаємо наступні допущення:
¾ задающий вплив – х(t) = UЯ(t);
23 июля 2008 |
7 |
23 июля 2008 |
8 |
¾збурюючий вплив – f(t) = МС(t) або f(t) = IС(t);
¾вихідна або регульована координата – у(t) = ω(t);
¾система абсолютно жорстка, тобто двигун має одну ступінь настрою;
¾маса обертових частин постійна;
¾статичний момент опору, наведений до вала двигуна, постійний МС(t) = const або IС(t) = const;
¾реакція якоря скомпенсована;
¾залежність кутової швидкості обертання вала двигуна від напруги якоря UЯ лінійна;
¾потік збудження електродвигуна в обмотці збудження незмінний і дорівнює номінальному значенню, який обраний за паспортними даними
Ф= ФН =const, Вб;
¾температура обмоток не змінюється.
Система диференціальних рівнянь, яка описує процеси, що проті-
кають в електродвигуні з урахуванням прийнятих допущень, має вигляд:
|
|
= IЯ R Я + LЯ |
dI |
Я |
+ ЕД; |
|
UЯ |
|
|||||
|
|
|||||
|
|
|
|
dt |
||
ЕД = КФН ω; |
|
|
|
|||
|
dω |
|
|
|
|
|
|
= M −MC; |
|
(2.1) |
|||
J |
|
|
|
|||
dt |
|
|
||||
|
|
|
|
|
|
|
М = КФН IЯ; |
|
|
|
|||
|
|
= КФН IC , |
|
|
|
|
МC |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де EД - ЕДС обертання електродвигуна, В; К - конструктивний коефіцієнт машини; J – момент інерції якоря, кг м2 .
Структурна алгоритмічна схема ДПС НЗ являє собою графічне зо-
браження системи рівнянь динаміки, записаних в операторній формі Лапласа:
|
|
|
|
|
UЯ(s) = R ЯIЯ(s) + LЯsIЯ(s) + EД(s); |
|
|
|
|
||||||||||||||
|
|
|
|
|
Jsω(s) = КФ(IЯ(s) −IC (s)), |
|
|
|
|
|
|
|
(2.1) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де |
s – оператор Лапласа. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
UЯ(s) |
−EД(s) = (R Я + LЯs)IЯ(s); |
(1' ) |
|
(2.2) |
|||||||||||||||||
|
|
|
|
|
|
= КФ(IЯ(s) −IC (s)), |
|
|
|
|
|
|
|
|
|
||||||||
|
|
Jsω(s) |
|
|
|
|
|
|
(2' ). |
|
|
||||||||||||
|
З (1' |
) одержуємо передатну функцію для електричної частини дви- |
|||||||||||||||||||||
гуна |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(s) |
= |
|
IЯ(s) |
|
= |
|
|
1 |
|
|
= |
1/ R Я |
|
= |
1/ R Я |
|
(2.3) |
|||||
|
U (s) −E (s) |
R |
|
+ L |
|
s |
LЯ |
T s +1 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
Я |
|
|
Д |
|
|
Я |
|
Я |
|
|
R Я s +1 |
|
Я |
|
|||
|
T = |
LЯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
де |
|
– електромагнітна стала часу якірного ланцюга, с; |
|
||||||||||||||||||||
R Я |
|
|
|||||||||||||||||||||
|
Я |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
LЯ = α |
|
|
|
UH |
|
– індуктивність якірного ланцюга, обумовлена по |
||||||||||||||||
|
2p nH |
|
|||||||||||||||||||||
|
|
|
IH |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
формулі Уманського з використанням паспортних даних ДПС НЗ; α = 5 ÷ 6 – коефіцієнт для скомпенсованих машин;
UН – номінальна напруга електродвигуна, В; р – число пар полюсів;
nН – номінальна частота обертання електродвигуна, об/хв (вибирається за паспортними даними ДПС НЗ);
IН – номінальний струм у якірній обмотці електродвигуна, А.
З ( 2' |
|
) одержуємо передатну функцію механічної частини двигуна |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КФН J |
R Я |
|
|
|
R Я |
|
|||
|
|
|
|
ω(s) |
|
|
|
|
|
ω(s) |
|
КФ |
|
|
(КФ |
|
)2 |
|
|
|
|
|
|||
W(s) = |
|
|
|
|
|
|
= |
|
= |
Н |
= |
Н |
|
= |
КФ |
Н |
, (2.4) |
||||||||
I |
|
(s) −I |
|
(s) |
I |
|
(s) |
|
|
J s T |
|
|
|
T |
|
||||||||||
|
Я |
C |
|
ДИН |
|
J s |
|
|
|
|
s |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
M |
|
|
|
|||
де TM = J |
R Я |
|
|
– електромеханічна стала часу, с; |
|
|
|
|
|
|
|
||||||||||||||
(КФН)2 |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
23 июля 2008 |
9 |
23 июля 2008 |
10 |
КФН = |
UH −IH R Я |
– номінальне значення КФН, |
В с |
; |
|
ωН |
рад |
||||
|
|
|
ωН = π30nН – зв'язок номінальної кутової швидкості обертання еле-
ктродвигуна з номінальною частотою обертання nН, вимірюваної в [об/хв], рад/c;
IЯ(s) −IС(s) = IДИН(s) – динамічна складова струму якоря електро-
двигуна, А.
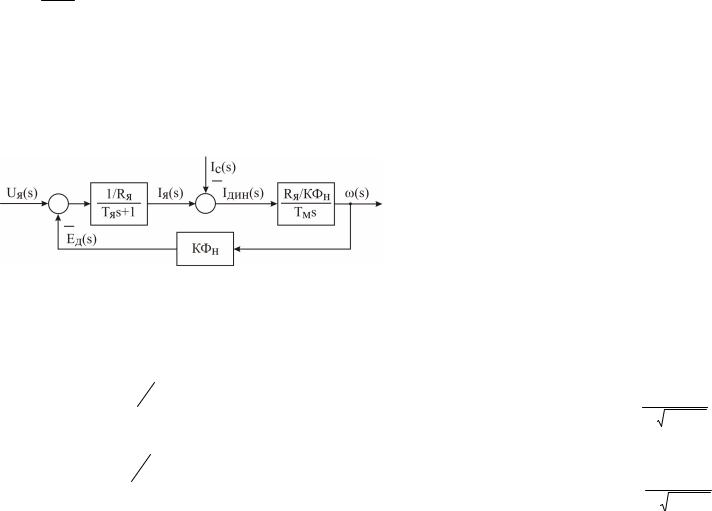
З обліком вищевикладеного становимо структурну алгоритмічну схему ДПС НЗ (рис. 2.2)
Рис. 2.2. Структурна алгоритмічна схема ДПС НЗ
По структурній алгоритмічній схемі одержимо передатні функції ДПС НЗ по задаючому UЯ(s) і збурюючому IС(s) впливам:
WUЯ (s) = |
|
ω(s) |
= |
|
1KФН |
|
|
= |
kД |
(2.5) |
||||
|
|
|
|
|
|
|
|
|
. |
|||||
|
UЯ(s) |
ТЯ ТМ s2 +ТМ s +1 |
ТЯ ТМ s2 +ТМ s +1 |
|||||||||||
|
ω(s) |
|
R Я |
KФН |
|
|
|
kI |
|
|||||
WIC (s) = |
IC (s) |
= |
ТЯ ТМ s2 +ТМ s +1 |
= |
ТЯ ТМ s2 +ТМ s +1 |
. |
(2.6) |
|||||||
Як бачимо, ДПС НЗ при прийнятих допущеннях описується передатною функцією другого порядку, загальноприйнятий запис якої має вигляд:
|
|
|
|
|
kД |
R(s) |
|
kI |
|
|
L(s) |
||||
WUЯ (s) = |
|
|
= |
|
; |
WIC (s) = |
|
= |
|
, |
|||||
Т2s2 +2ξТs +1 |
Q(s) |
Т2s2 +2ξТs +1 |
Q(s) |
||||||||||||
де ξ – коефіцієнт демпфірування; |
|
|
|
|
|
|
|||||||||
кД = |
1 |
|
– коефіцієнт передачі електродвигуна по напрузі якоря; |
||||||||||||
|
kΦН |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
кI = |
|
R Я |
|
– коефіцієнт передачі електродвигуна |
по статичному |
||||||||||
KΦН |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
струму;
R(s), L(s) – поліноми чисельників передатних функцій по задаючому WUЯ (s) та збурючому WIC (s) впливам;
Q(s) – характеристичний поліном ДПС НЗ. Він не залежить від вхідного впливу і тому той самий для передатних функцій по задаючому WUЯ (s) та збурючому WIC (s) впливам.
Характер протікання перехідних процесів швидкості обертання двигуна ω(t) залежить від значення коефіцієнта демпфірування ζ, що обчислюється з характеристичного рівняння ДПС НЗ. Характеристичним рівнянням називається рівняння, отримане в результаті прирівнювання полінома знаменника передатної функції до нулю, тобто
Q(p) = Т2s2 +2ξТs +1 = 0 : |
(2.7) |
•коливальний характер перехідних процесів якщо
ξ = |
|
TM |
<1 або |
m = |
TМ |
< 4 ; |
|
|
|||||
2 |
|
T |
T |
|
ТЯ |
|
|
|
Я |
M |
|
|
|
•аперіодичний характер перехідних процесів якщо
ξ = |
|
TM |
≥1 або |
m = |
TМ |
≥ 4 . |
|
|
|||||
2 |
|
T |
T |
|
ТЯ |
|
|
|
Я |
M |
|
|
|
2.2.Завдання на виконання роботи
1.Вивчити лекційний матеріал по темах: «Математичний опис АСК»
23 июля 2008 |
11 |
23 июля 2008 |
12 |
і «Побудова структурних алгоритмічних схем АСК». |
|
2.3. Питання для самоконтролю |
||||
2. Відповісти на питання для самоконтролю, які наведені в даних ме- |
5. |
Запишіть систему диференціальних рівнянь, що описують роботу |
||||
тодичних вказівках. |
ДПС НЗ. |
|||||
3. Одержати у викладача індивідуальний варіант значень параметрів |
6. Назвіть допущення, які прийняті при побудові структурної алго- |
|||||
ДПС НЗ (див. Табл. 2.1). |
ритмічної схеми ДПС НЗ. |
|||||
4. Підготувати в пакеті MATLAB розширенні Simulink структурну |
7. Намалюйте структурну алгоритмічну схему та назвіть параметри і |
|||||
алгоритмічну схему моделі ДПС НЗ (див. Додаток 3), попередньо розра- |
координати двигуна. |
|||||
хувавши параметри її окремих блоків. |
8. Дайте визначення передатної функції АСК. Запишіть передатні |
|||||
5. Одержати перехідні процеси UЯ = f (t) , IЯ = f (t) , IС = f (t) , |
функції ДПС НЗ по задаючому та збурючому впливам. |
|||||
IДИН = f (t) , |
ω = f (t) в одній системі координат у наступних режимах ро- |
9. Що називається коефіцієнтом передачі АСК. Назвіть коефіцієнти |
||||
передачі двигуна і запишіть вираження для їхнього визначення. |
||||||
боти ДПС НЗ: |
||||||
10. |
Як визначити очікуваний характер перехідного процесу швидко- |
|||||
5.1 |
пуск на холостому ходу (IС = 0), до незмінного значення куто- |
|||||
сті обертання ДПС НЗ по його передатній функції. |
||||||
|
|
UН |
|
|||
вої швидкості ω0 = |
; |
11. |
Поясните фізичний зміст коефіцієнта демпфірування. |
|||
|
||||||
|
|
KФН |
12. |
Який рух називається незмінним. |
||
5.2 |
пуск під навантаженням (IС = IН) до незмінного значення ωН; |
13. |
Одержите вираження для визначення величини зменшення («осі- |
|||
5.3 |
пуск на холостому ходу (IС = 0) до незмінного значення куто- |
дання») кутової швидкості двигуна при набросі навантаження. |
||||
вої швидкості ω0 з наступним набросом навантаження (IС = IН) при |
14. |
Що таке динамічний момент (струм) ЕП. Укажіть, у якому опиті |
||||
t = tНЕЗМ і рухом до незмінного значення ωН, де tНЕЗМ – час розгону двигуна |
IДИН = IЯ . |
|||||
до незмінної швидкості ω0, [с], обумовлене з опиту №1 (Див. рис. П.3.3); |
15. |
Поясните, чому при виконанні опиту 5.5 кутова швидкість двигу- |
||||
5.4 |
останов (відключення) двигуна з початкової кутової швидко- |
на не дорівнює нулю, а приймає негативне значення. Як обчислити це зна- |
||||
сті ω0 на холостому ходу (IС = 0); |
чення ∆ωЗ? |
|||||
5.5 |
останов (відключення) двигуна з початкової кутової швидко- |
16. |
Поясните, чому в опиті 5.7 відрізняються за абсолютним значен- |
|||
сті ωН при навантаженні IС = IН; |
ням незмінні значення кутової швидкості при пуску і реверсі двигуна. |
|||||
5.6реверс двигуна з початкової кутової швидкості ω0 на холостому ходу (IС = 0);
5.7реверс двигуна з початкової кутової швидкості ωН при наван-
таженні IС = IН.
6.Виконати розрахунок досліджуваної моделі, зберігаючи графічні результати розрахунків у вигляді файлів.
7.Оформити звіт про лабораторну роботу.
8.Одержати оцінку результатів своєї роботи у викладача, відповівши на його контрольні питання.
23 июля 2008 |
13 |
23 июля 2008 |
14 |
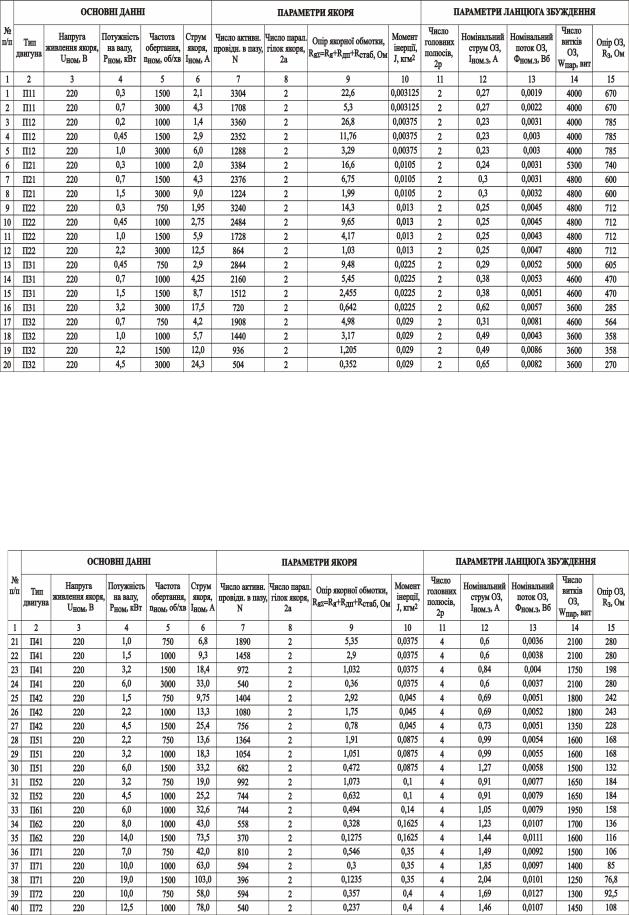
Таблиця 2.1. – Паспортні данні ДПС НЗ
15
Продовження табл. 2.1. – Паспортні дані ДПС НЗ
16

Лабораторна робота № 3
Дослідження АСК стабілізації частоти обертання двигуна постійного струму з незалежним збудженням (ДПС НЗ)
Ціль роботи: придбання навичок складання передатних функцій (ПФ) замкнутої та розімкнутої АСК по задаючому і обурюючому впливам, ПФ помилки від задаючого і обурюючого впливів по структурній алгоритмічній схемі АСК; аналіз стійкості АСК по виду перехідної функції, по алгебраїчних і частотних критеріях; синтез коригувальних пристроїв, що забезпечують задані показники якості перехідних процесів у досліджуваної АСК з використанням математичного моделювання на персональному комп'ютері (ПК) у середовищі пакета MATLAB розширення Simulink.
3.1. Теоретичні положення
Автоматизація є одним з головних напрямків науково-технічного прогресу і важливим засобом підвищення ефективності виробництва. Сучасне промислове виробництво характеризується ускладненням технологічних процесів, збільшенням одиничної потужності окремих агрегатів і установок, застосуванням інтенсивних, високошвидкісних режимів, близьких до критичних, підвищенням вимог до якості продукції, безпеки персоналу, схоронності встаткування і навколишнього середовища. Все це обумовило широке застосування систем автоматичного регулювання, які повинні забезпечувати підтримку на певному рівні або зміна за заданим законом регульованих величин у машинах і агрегатах без участі людини за допомогою технічних засобів.
АСК класифікують по різних ознаках: за принципом дії, призначенню, характеру сигналів, математичному опису і т.д. Широке поширення одержали АСК стабілізації, у яких задаючий вплив постійний x(t) =const
і регульована величина підтримується постійно із заданою точністю y(t) = f (x(t)) = yз ±∆у , де ∆y - задана точність. Прикладом такої АСК є
система стабілізації швидкості обертання двигуна постійного струму, структурна алгоритмічна схема, якої представлена на рис. 3.1, де прийня-
17
ті наступні позначення: UЗ (s), Ubr (s) – напруга завдання системи і тахогенератора в операторній формі Лапласа, В; s – оператор Лапласа; ε(s) – помилка регулювання АСК в операторній формі Лапласа; КУ – коефіцієнт підсилення операційного підсилювача; КТП – коефіцієнт посилення тиристорного перетворювача; Тµ – мала стала часу тиристорного перетворювача, с; Ed(s), Eд(s) – середнє выпрямленное значення ЕДС перетворювача і ЕДС обертання електродвигуна в операторній формі Лапласа, В; RЯ – опір якірної обмотки електродвигуна, Ом; TЯ = LЯ  R Я –
R Я –
електромагнітна стала часу якірного ланцюга, с; LЯ – індуктивність якірного ланцюга, Гн; IЯ(s), IС(s), Iдин(s) – струми якірного ланцюга електродвигуна, опору і динамічний в операторній формі Лапласа, А; К - конструктивний коефіцієнт машини; ФН – номінальний потік збудження еле-
ктродвигуна в обмотці збудження, Вб; TM = J |
R Я |
– електромехані- |
|
(КФН)2 |
|||
|
|
чна стала часу, с; J – момент інерції якоря електродвигуна, кг м2 ; Кbr – коефіцієнт підсилення тахогенератора, (В с) рад ; ωдв(s) – кутова швид-
рад ; ωдв(s) – кутова швид-
кість електродвигуна в операторній формі Лапласа, рад/с.
В якості задаючого впливу прийнято х(s) = UЗ(s) = 10 В; обурюючого впливу – f(s) = IС(s) = IН, А; вихідних або регульованих координат – у(s) = ωдв(s) і у(s) = ε(s).
Рис. 3.1. Структурна алгоритмічна схема АСК стабілізації швидкості обертання ДПС НЗ
Робота АСК стабілізації заснована на використанні зворотного зв'я- зку по швидкості електродвигуна. Напруга зворотного зв'язку Ubr (s) зрівнюється з напругою завдання UЗ (s), на підставі їхньої різниці виробля-
18
ється напруга живлення якірної обмотки, за допомогою якого і регулюється швидкість обертання електродвигуна ωдв(s).
До процесів керування АСК пред'являються вимоги стійкості, точності в сталому режимі і якості перехідного процесу.
АСК стійка, якщо в системі відбувається загасання перехідного процесу під впливом обмежених по величині керуючого і обурюючого зовнішніх впливів. Для судження про стійкість системи розроблені критерії:
–алгебраїчні – за допомогою яких можна судити про стійкість САК за коефіцієнтами характеристичного рівняння системи (критерії Рауса, Гурвіца та Рауса - Гурвіца);
–частотні – дозволяють судити про стійкість САК по виду частотних характеристик. Ці критерії є графоаналітичними, з їхньою допомогою можна досліджувати АСК високого порядку (критерії Михайлова та Найквіста).
Точність регулювання характеризується погрішністю системи в сталому режимі. У статичної АСК стала помилка (погрішність) при постійному заданому вхідному впливі залежить від обурюючого впливу. Якщо помилка регулювання за тих самих умов не залежить від обурюючого впливу то така система буде астатичною.
Точність АСК в сталому режимі забезпечується різними шляхами. До найбільш простим ставляться: збільшення коефіцієнту передачі або порядку астатизму при збереженні стійкості та певної якості перехідних процесів.
Корекція АСК застосовується для забезпечення стійкості нестійкої системи або розширення області стійкості, точності та підвищення якості перехідного процесу. Здійснюється корекція за допомогою введення в
систему спеціальних коригувальних ланок, які можуть включатися або послідовно з основними ланками САК, або паралельно їм.
Передатну функцію коригувального пристрою можна одержати за допомогою:
•графоаналітичного методу кореневого годографа, що полягає в побудові на комплексній площині траєкторій корінь характеристичного рівняння при зміні яких-небудь змінних параметрів системи і, таким чи-
19
ном, зв'язує значення цих параметрів з якістю перехідного процесу АСК;
• методу синтезу коригувальних пристроїв, розробленого В.В. Солодовніковим, заснованого на відповідності між логарифмічними частотними характеристиками розімкнутої системи і її статичними та динамічними властивостями в замкнутому стані. Метод використовується для систем мінімально - фазового типу, і тому досить розглядати тільки логарифмічну амплітудно-частотну характеристику (ЛАЧХ) розімкнутої системи.
3.2.Завдання на виконання роботи
1.Вивчити лекційний матеріал по темах: «Стійкість АСК», «Точність АСК» і «Корекція АСК».
2.Відповісти на питання для самоконтролю, які наведені в даних методичних вказівках.
3.При значенні коефіцієнта підсилення тиристорного перетворюва-
ча Ктп = 30 і малої сталої часу Тµ = 0,03 с для індивідуального варіанта значень параметрів ДПС НЗ (див. табл. 2.1) розрахувати коефіцієнт зворотнього зв’язку Кbr при якому швидкість обертання ДПС НЗ відповідає швидкості холостого ходу ω0, рад/с при похибці регулювання по задаючому впливу рівної нулю εUз (s)= 0 , розрахувати коефіцієнт підсилення
операційного підсилювача Кп, при якому швидкість обертання ДПС НЗ відповідає номінальному значенню ωн дв, рад/с.
4.Підготувати в пакеті MATLAB розширенні Simulink структурну алгоритмічну схему моделі АСК стабілізації швидкості обертання ДПС НЗ, представлену на рис. 3.1, попередньо розрахувавши параметри її окремих блоків.
5.Одержати передатні функції замкнутої і розімкнутої досліджуваної АСК аналітичним і програмним способами:
5.1. по керуючому впливу W |
(s) = |
ωдв(s) |
; |
|
||
|
|
|
||||
UЗ |
|
UЗ(s) |
|
|||
|
|
|
|
|
||
5.2. по обурюючому впливу W |
(s) = |
ωдв(s) |
; |
|||
IC (s) |
||||||
IC |
|
|
||||
|
|
|
|
|||
20 |
|
|
|
|
|
|