

динамика / Glava_2d
.docГлава 2. Динамика относительного движения МТ
2.1. Дифференциальные уравнения
относительного движения МТ
Пусть имеется инерциальная система отсчета О1x1y1z1. Рассмотрим движение МТ массы m по отношению к неинерциальной системе отсчета Oxyz, которая произвольным образом (с ускорением) движется по отношению к инерциальной системе отсчета (рис. 18).
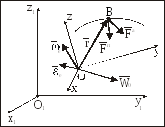
Рис. 18
На основании второго (основного) закона динамики – соотношения (1.2) для несвободной МТ имеем:
![]() , (2.1)
, (2.1)
где
![]() ,
,
![]() – абсолютное ускорение МТ – ускорение
МТ по отношению к инерциальной системе
координат.
– абсолютное ускорение МТ – ускорение
МТ по отношению к инерциальной системе
координат.
Используя теорему о сложении скоростей в сложном движении МТ (Ч.1 Кинематика), перепишем соотношение (2.1) в виде:
![]() , (2.2)
, (2.2)
здесь
![]() – относительное ускорение МТ,
– относительное ускорение МТ,
![]() – переносное ускорение МТ,
– переносное ускорение МТ,
![]() – ускорение Кориолиса.
– ускорение Кориолиса.
Совершив простейшие алгебраические преобразования и введя обозначения сил инерции, получим:
![]() , (2.3)
, (2.3)
где
![]() – переносная сила инерции,
– переносная сила инерции,
![]() – сила
инерции Кориолиса.
– сила
инерции Кориолиса.
В
этих соотношениях использованы формулы
(Ч.1 Кинематика) для ускорения точки НМС
в общем случае ее движения и формулы
для ускорения Кориолиса, в которых
![]() – абсолютное ускорение начала
неинерциальной системы координат,
– абсолютное ускорение начала
неинерциальной системы координат,
![]() и
и
![]() – угловые скорость и ускорение
неинерциальной системы координат по
отношению к инерциальной,
– угловые скорость и ускорение
неинерциальной системы координат по
отношению к инерциальной,
![]() и
и
![]() – относительные скорость и ускорения
МТ по отношению неинерциальной системы
координат.
– относительные скорость и ускорения
МТ по отношению неинерциальной системы
координат.
Из соотношения (2.3) следует, что движение МТ относительно неинерциальной системы отсчета можно рассматривать так же, как и относительно инерциальной, добавляя при этом в правую часть уравнения движения МТ переносную и кориолисову силы инерции.
2.2. Равновесие МТ вблизи поверхности Земли
Для
равновесия несвободной МТ, подвешенной
на нити, (![]() )
вблизи поверхности Земли (рис. 19)
соотношение (2.3) примет вид:
)
вблизи поверхности Земли (рис. 19)
соотношение (2.3) примет вид:
![]() ,
,
где
![]() – сила всемирного тяготения, направленная
к центру Земли,
– сила всемирного тяготения, направленная
к центру Земли,
![]() – пассивная сила – сила реакции нити,
– пассивная сила – сила реакции нити,
![]() – нормальная составляющая переносной
силы инерции вследствие вращения Земли
(угловая скорость суточного вращения
Земли =const),
направленная по кратчайшему расстоянию
к оси вращения и равная по модулю
– нормальная составляющая переносной
силы инерции вследствие вращения Земли
(угловая скорость суточного вращения
Земли =const),
направленная по кратчайшему расстоянию
к оси вращения и равная по модулю
![]() (1
– расстояние МТ от земной оси).
(1
– расстояние МТ от земной оси).
Уравнение равновесия МТ в неинерциальной системе отсчета, связанной с земной поверхностью, будет иметь вид:
![]() .
(2.4)
.
(2.4)
Из
соотношения (2.4) следует, что
![]() –
пассивная сила – сила реакции нити
уравновешивается
–
пассивная сила – сила реакции нити
уравновешивается
![]() –
силой тяжести МТ, являющейся равнодействующей
силы всемирного тяготения
–
силой тяжести МТ, являющейся равнодействующей
силы всемирного тяготения
![]() и переносной силы инерции
и переносной силы инерции
![]() :
:
![]() .
(2.5)
.
(2.5)
Линия
действия силы тяжести МТ называется
вертикалью в данном пункте земной
поверхности. Угол ,
составленный вертикалью (а не радиусом
Земли) с плоскостью экватора, называется
географической широтой в данном пункте
земной поверхности. Так как модуль силы
![]() является малой величиной (величина
является малой величиной (величина
![]() очень мала) по сравнению с модулем силы
очень мала) по сравнению с модулем силы
![]() ,
то направление силы
,
то направление силы
![]() мало отличается от направления силы
мало отличается от направления силы
![]() .
.
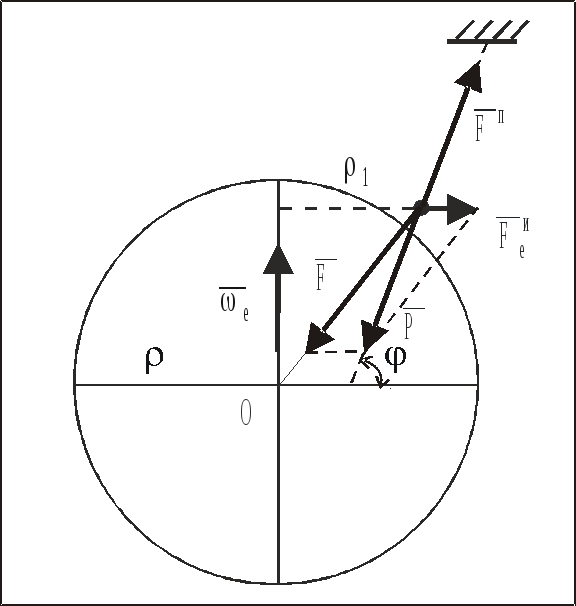
Рис. 19
Так
как масса МТ постоянна, то из соотношения
(2.5) и второго (основного) закона динамики
следует, что сила тяжести
![]() и ускорение свободного падения
и ускорение свободного падения
![]() зависят от географической широты в
данном пункте земной поверхности.
Наибольшее значение сила тяжести
зависят от географической широты в
данном пункте земной поверхности.
Наибольшее значение сила тяжести
![]() ,
а, следовательно, и
,
а, следовательно, и
![]() – ускорение свободного падения будет
иметь на полюсах Земли, а наименьшее –
на экваторе.
– ускорение свободного падения будет
иметь на полюсах Земли, а наименьшее –
на экваторе.
2.3. Отклонение к востоку МТ,
падающей вблизи поверхности Земли
Рассмотрим
МТ, массы m, падающую без начальной
скорости на поверхность Земли с малой
(по сравнению с радиусом Земли) высоты
h, так что
 – ускорение свободного падения за время
падения можно считать постоянным (рис.
20). Сопротивлением воздуха пренебрегаем.
– ускорение свободного падения за время
падения можно считать постоянным (рис.
20). Сопротивлением воздуха пренебрегаем.
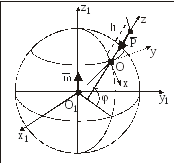
Рис. 20
Начало подвижной системы координат, неизменно связанной с вращающимся земным шаром, возьмем на поверхности Земли в точке О с географической широтой , ось Ох направим на юг по касательной к меридиану, ось Оу – на восток по касательной к параллели, а ось Оz – по вертикали.
Соотношение
(2.3) с учетом (2.5) и формулы для
![]() примет вид:
примет вид:
![]() ,
,
или
![]() .
.
Перепишем
последнее соотношение, представив
векторное произведение в виде определителя
и учтя, что
![]() - единичные орты подвижной системы
координат,
- единичные орты подвижной системы
координат,
![]() составляет угол 900–
с осью Оz,
а
составляет угол 900–
с осью Оz,
а
![]() – координаты относительной скорости
– координаты относительной скорости
![]() :
:
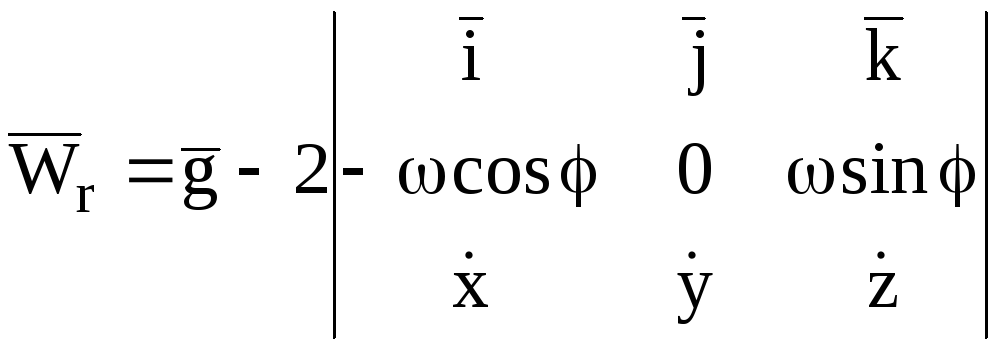 .
(2.6)
.
(2.6)
Спроектировав соотношение (2.6) на подвижные оси координат Оxyz, получим дифференциальные уравнения свободно падающей МТ с учетом неинерциальности системы отсчета:
 (2.7)
(2.7)
Предполагаем, что МТ начинает падать без начальной скорости с высоты h, т.е.
при
![]()
![]() (2.8)
(2.8)
Интегрируя уравнение (2.7) с учетом начальных условий (2.8), получим:
 (2.9)
(2.9)
Интегрирование системы дифференциальных уравнений (2.9) проведем методом последовательных приближений.
Если пренебречь ускорением Кориолиса, уравнения (2.9) примут вид:
 (2.10)
(2.10)
Решением системы дифференциальных уравнений (2.10) при начальных значениях (2.8) будет:
![]() .
.
Приняв это решение за первое приближение и подставив его в (2.9), получим дифференциальные уравнения второго приближения:
![]() (2.11)
(2.11)
Интегрируя систему дифференциальных уравнений (2.11) с начальными условиями (2.8), получим уравнения движения МТ с учетом вращения Земли, в которых появляется отклонение к востоку (в сторону положительного направления оси у):
![]() (2.12)
(2.12)
Исключив из уравнений (2.12) время t, найдем уравнение траектории МТ:
![]() .
(2.13)
.
(2.13)
Траекторией движения МТ для рассматриваемого второго приближения будет полукубическая парабола (рис. 21).
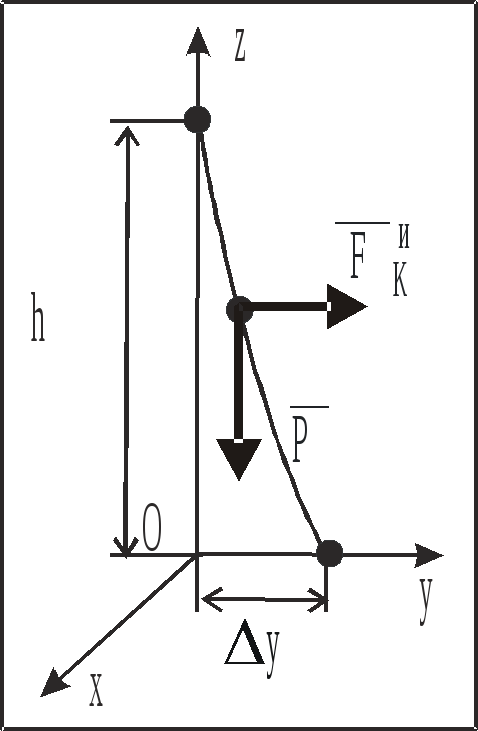
Рис. 21
Отклонение МТ в момент ее падения на поверхность Земли – y найдем, если в уравнении (2.13) положим z=0:
![]() .
.
Если найти третье приближение, то одновременно с отклонением к востоку появится отклонение к югу, но это отклонение будет очень мало, так как в выражение для x войдет очень малая величина порядка 2.