

Глава 4. Плоскопараллельное движение нмс
4.1. Определение
Определение: Плоскопараллельным движением НМС называется такое движение, при котором все ее точки движутся в плоскостях, параллельных какой-либо неподвижной плоскости (рис. 22).
Плоскость П0 - неподвижная плоскость. Плоскости П1 и П2 - плоскости, параллельные неподвижной плоскости П0.
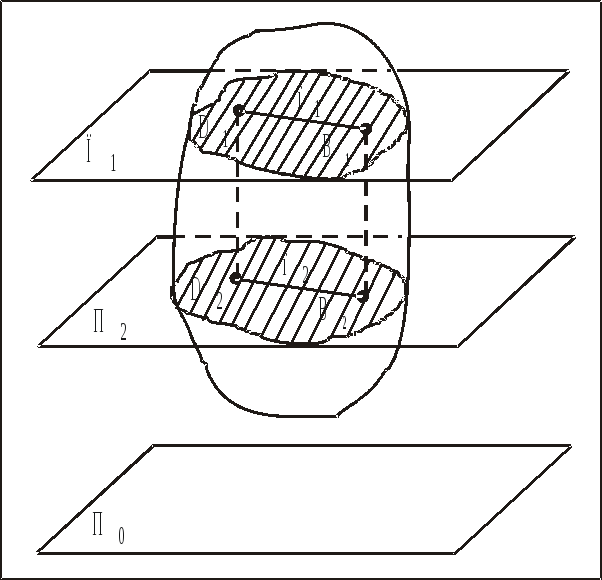
Рис. 22
п1 и п2 - плоские фигуры, образованные сечениями НМС плоскостями П1 и П2 соответственно.
В1В2 и D1D2 - отрезки прямых, перпендикулярных к плоскостям П0, П1 и П2.
Из определения плоскопараллельного движения НМС следует, что отрезки В1В2 и D1D2 перемещаются параллельно самим себе (в противном случае будет нарушено определение и одна или обе МТ соответственно В1 и В2 или D1 и D2 сойдут с плоскостей П1 и П2).
Это означает, что отрезки В1В2 и D1D2 перемещаются поступательно. Движение всех точек, лежащих на прямых, перпендикулярных к плоскости П0, определяется движением одной из этих точек (свойство поступательного движения НМС), а движение НМС — движением одного из параллельных сечений НМС (п1, п2 и другие) в плоскости этого сечения (например, п1 в плоскости П1, п2 в плоскости П2).
Таким образом, рассмотрение плоскопараллельного движения НМС сводится к рассмотрению движения плоской фигуры в ее плоскости. Положение плоской фигуры на плоскости вполне определяется положением ее двух точек или положением отрезка, соединяющего две точки этой фигуры, поэтому движение НМС и плоской фигуры в ее плоскости сводится к рассмотрению движения прямолинейного отрезка в этой плоскости (например, движение отрезка D1В1 в плоскости П1 или отрезка D2В2 в плоскости П2).
Рассматриваются два метода изучения плоскопараллельного движения НМС: геометрический и аналитический.
4.2. Геометрический метод рассмотрения движения плоской фигуры в ее плоскости
Теорема Шаля 1: Всякое непоступательное перемещение плоской фигуры в ее плоскости из одного положения в другое может быть представлено как сумма двух перемещений: поступательного вместе с произвольной точкой, выбранной в качестве полюса, и вращательного относительно этого полюса. При этом поступательное перемещение зависит от выбора полюса, а вращательное от него не зависит.
Под вращательным перемещением плоской фигуры относительно полюса понимается вращательное перемещение этой плоской фигуры вместе с НМС, сечением которой является эта плоская фигура, относительно оси, проходящей через полюс перпендикулярно плоской фигуре (или плоскости П0).
Доказательство: На рис. 23 изображены два положения плоской фигуры и отрезка ВD в моменты времени t1 и t2: соответственно В1D1 и В2D2.
Выберем
в качестве полюса точку D.
Отрезок В1D1
перемещаем поступательно (т.е. параллельно
самому себе) в положение
![]() ,
а затем поворачиваем вокруг полюса на
угол
,
а затем поворачиваем вокруг полюса на
угол![]() .
Точка
.
Точка![]() попадет в точку В2,
так как длина отрезка ВD
неизменна. Первая часть теоремы доказана.
попадет в точку В2,
так как длина отрезка ВD
неизменна. Первая часть теоремы доказана.
Для
доказательства второй части теоремы в
качестве полюса выберем точку В. Отрезок
В1D1
перемещаем поступательно (т.е. параллельно
самому себе) в положение
![]() ,
а затем поворачиваем вокруг полюса на
угол
,
а затем поворачиваем вокруг полюса на
угол![]() .
На рис. 23 видно, что поступательные
составляющие перемещений отрезка ВD
различны при выборе в качестве полюсов
В и D
(D1D2
.
На рис. 23 видно, что поступательные
составляющие перемещений отрезка ВD
различны при выборе в качестве полюсов
В и D
(D1D2![]() В1В2),
а вращательные составляющие равны, так
как
В1В2),
а вращательные составляющие равны, так
как
![]() ,
как накрестлежащие углы при двух
параллельных и одной секущей.
,
как накрестлежащие углы при двух
параллельных и одной секущей.

Рис. 23
Поскольку поступательная часть перемещения плоской фигуры с изменением полюса меняется, оказывается возможным выбрать полюс так, чтобы эта часть перемещения вообще отсутствовала.
Теорема Шаля 2: Всякое непоступательное перемещение плоской фигуры в ее плоскости из одного положения в другое может быть представлено как конечный поворот этой фигуры относительно определенного центра вращения.
Конечный поворот плоской фигуры относительно определенного центра вращения понимается в том же смысле, что и вращательное перемещение этой плоской фигуры в теореме Шаля 1.
Доказательство: На рис. 24 изображены два положения отрезка ВD в моменты времени t1 и t2: соответственно В1D1 и В2D2.
Соединим точки В1 и D1 соответственно с точками В2 и D2 и из середин отрезков В1В2 и D1D2 восстановим перпендикуляры. Точка пересечения этих перпендикуляров О — центр вращения (как будет доказано ниже).
![]() ,
так как
,
так как
![]() и
и![]()
![]() ,
как наклонные, равноудаленные от
перпендикуляра.
,
как наклонные, равноудаленные от
перпендикуляра.
Из
равенства треугольников следует, что
![]() .
.

Рис. 24
После
поворота
![]() на
на![]() относительно точки О отрезок ОВ1
совпадает с отрезком ОВ2,
одновременно ОD1
отрезок должен совпасть с отрезком ОD2,
так как
относительно точки О отрезок ОВ1
совпадает с отрезком ОВ2,
одновременно ОD1
отрезок должен совпасть с отрезком ОD2,
так как
![]() ,
т. е.
,
т. е.
![]() ,
,
и, как следствие, отрезок В1D1 совпадет с отрезком В2D2.
Таким образом, перемещение отрезка ВD из положения В1D1 в положение В2D2 представлено конечным поворотом относительно центра О.
Из доказанных теорем следует, что всякое непоступательное перемещение плоской фигуры в ее плоскости из одного положения в другое может быть представлено двумя способами: либо суммой поступательного и вращательного движений либо одним вращательным движением.